矿井箕斗定重自动装载系统
吴远青
摘 要:为了解决传统的矿井提升系统结构复杂,开凿硐室面积大,投资大,运行不可靠等缺点,设计了矿井箕斗定重自动装载系统。详细介绍了系统组成、运行过程和校正系统的工作原理。实际应用表明,该系统的使用提高了运行可靠性,节省投资,应用前景广阔。
关键词:箕斗;定重装载;PLC
引言:传统的提升式装载系统采用定量称进行称量,这种称量结构具有以下一些弊端:(1)结构复杂,易出故障;(2)水分含量大的原煤滞留定量斗的情况较为突出,增加空气炮进行疏通增加了成本和复杂度[1]。针对以上情况本文提出了一种非接触称量技术的矿井箕斗定重自动装载系统,结构简单,运行经济可靠。该系统的使用减少了硐室开凿面积和凿井深度,降低了提升高度和排水高度,节省投资。
一、传统的箕斗提升式定量装载系统
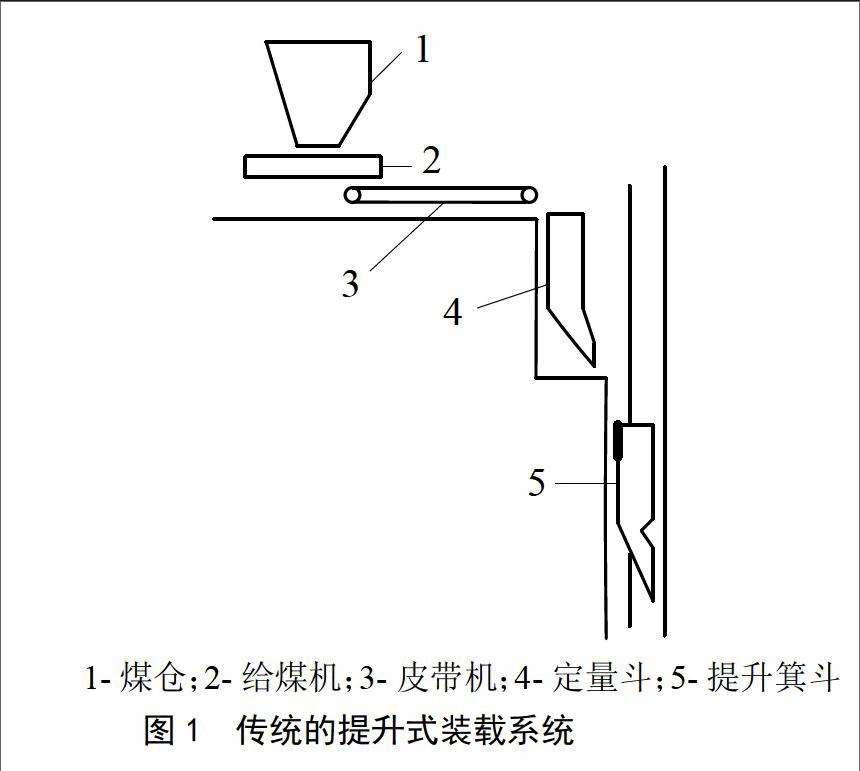
传统的箕斗提升式定量装载系统在实际的使用过程中,定量斗箱式装载设备的箕斗滞煤严重,且滞煤量极具不确定性[2]。如图1所示,对于这些煤矿因为煤质粘度大,原煤因为潮湿而滞留定量斗的问题,工程技术人员往往会通过在定量斗4中装载空气炮的方法迫使定量斗中原煤进入提升箕斗。而且,在这种情况下,微电子元件受井简涌水严重、硐室湿度大等恶劣条件影响,很容易损坏,进而导致控制设备出现故障而停运。在这种煤质的煤矿的生产过程中,通常将主井箕斗提升改为手动操作。操作时凭经验及感觉,估计滞煤量,采用打点计数(27~55s)装载,很不准确,常出现半罐提升和溢出,撒煤量大,提升能力受到极大的限制。
1-煤仓;2-给煤机;3-皮带机;4-定量斗;5-提升箕斗
图1 传统的提升式装载系统
二、箕斗定重自动装载系统
矿井箕斗定重自动装载系统,有效地实现了主提升自动定量装载,结构简单,使用安全可靠,经济、合理。改进了原系统的硐室结构,取消定量斗,采用原煤经皮带直接进入箕斗的装载结构。本系统造价低,平均为6000元/套,投资不到定量斗箱式装载设施0.3-0.4%,一方面降低了装载系统的复杂程度,减少了投入成本,避免了不必要的故障隐患;另一方面使用经济效益好,减小了硐室体积(开挖硐室2500m3左右),对新建矿井可减少建井深度10m左右,每次提升减少提升距离10m,排水高度减少10m,节约了主井建设成本。
本文所介绍的矿井箕斗定重自动装载系统,包括给煤机,箕斗提升系统,定量称重装置,程序控制器,皮带运输机,所述给煤机输送物料到皮带运输机,皮带运输机喂料口的设置和加料状态下提升箕斗的加料口对应。所述定量称重装置的一次检测元件采用霍尔传感器[3],所述定量称重装置包括磁铁和一组或并列的两组霍尔传感器,所述霍尔传感器组中的每一个霍尔传感器依次安装在井筒一侧,磁铁和霍尔传感器对应安装在提升箕斗上,所述霍尔传感器输出信号连接程序控制器;程序控制器输出信号控制连接给煤机,并向提升控制室发出停车和运行信号。
自动装载系统在提升控制室设有微机控制系统,所述程序控制器和微机控制系统交互连接,程序控制器输出信号控制连接给煤机和提升箕斗提升系统,微机控制系统包括人机界面[4]。
矿井箕斗定重自动装载系统的使用有效地实现了主提升自动定量装载,结构简单,使用安全可靠,经济、合理。改进了原系统的硐室结构,取消定量斗,采用原煤经皮带直接进入箕斗的装载结构。
三、箕斗定重自动装载系统的实现
箕斗定重自动装载系统,采用霍尔探测传感器感知箕斗位置,控制精度高、电气隔离性能好,能有效避免强电部分窜入弱电部分,故障率基本为零。在井筒一侧安装霍尔传感器一组,在箕斗上安装磁铁一个,根据原煤重量和钢丝绳长度成正比的原理进行原煤称量。当箕斗下放到指定深度后,系统通霍尔传感器的反馈获取箕斗在装载过程中的下移量(即钢丝绳的拉伸长度)。当钢丝绳拉伸达到指定长度,即表示装载到设定重量。于是系统停止装载,发出提升信号。
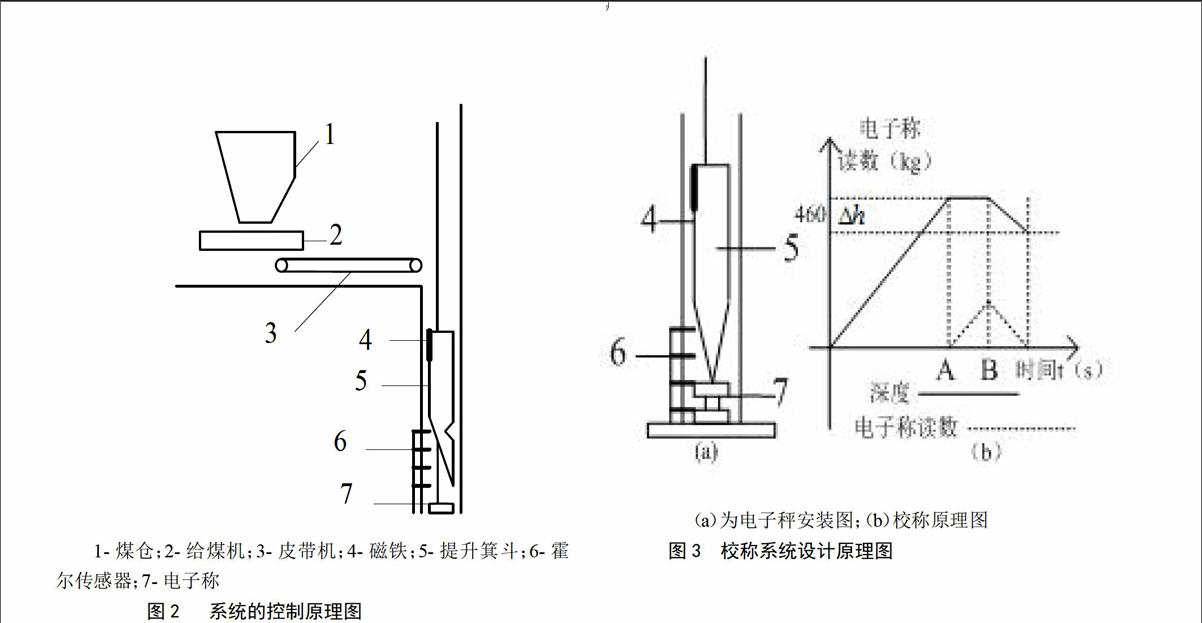
矿井箕斗定重自动装载系统的控制原理图如图2所示。该系统包括煤仓1,给煤机2,箕斗提升系统,定量称重装置,程序控制器,所述定量称重装置的一次检测元件采用霍尔传感器,所述定量称重装置包括磁铁4和一组或并列的两组霍尔传感器6,所述霍尔传感器组中的每一个霍尔传感器依次安装在井筒一侧,所述磁铁4和霍尔传感器6对应安装在提升箕斗5上,所述霍尔传感器输出信号连接程序控制器;程序控制器输出信号控制连接给煤机2,并向提升控制室发出停车和运行信号。所述的矿井箕斗定重自动装载系统,包括皮带机3,所述给煤机2输送物料到皮带机3,所述皮带机的喂料口设置与加料状态下提升箕斗5的加料口对应。
1-煤仓;2-给煤机;3-皮带机;4-磁铁;5-提升箕斗;6-霍尔传感器;7-电子称
图2 系统的控制原理图
四、箕斗定重自动装载系统的校称系统
矿井箕斗定重自动装载系统在实际的使用情况下,硐室设计比较容易完成。在原定量斗上方加装封闭地板,皮带机进行加长前移,主井箕斗底部重定位钢梁位置,即可完成硐室设计。但由于着塑性变形、气候会引起钢丝绳的蠕变等原因,因此需要设计行之有效的校称系统,针对钢丝弹性拉长引起的误差进行校正。
箕斗定重自动装载校称设计原理如图3所示:图3(a)中,在提升箕斗下方安装一个煤安电子秤7,作为校称的依据。图3(b)是校称原理图,图中,实线是深度和时间的曲线、长虚线是电子秤读数和时间的曲线。假设当提升箕斗5的下放深度达到460m时,电子秤开始有读数。随着时间的推移,皮带机3开始向提升箕斗中加煤,电子秤7的读数也随之变大。当读数达到额定称量值时,停止皮带装载。随后,绞车开始提升箕斗。而由于箕斗中已经装载了煤,所以在电子称读数回到0之前,箕斗并没有提升,而绞车房的深度指示(该值由天轮的旋转产生)发生了变化。下放深度和箕斗离开电子秤的深度之间的差值及为调整值。该调整值通过选择不同的霍尔检测探头来进行校正。
(a)为电子秤安装图;(b)校称原理图
图3 校称系统设计原理图
五、结语
矿井箕斗定重自动装载系统是基于PLC控制装置,采用微机技术对各霍尔传感器的信号进行采集,并根据设定进行自动装载,装载完毕后向提升控制室发出停车和运行信号,有效地实现了主提升自动定量装载,结构简单,使用安全可靠,经济、合理。
参考文献:
[1] 李海波.对煤矿立井提升箕斗的发展c
摘 要:为了解决传统的矿井提升系统结构复杂,开凿硐室面积大,投资大,运行不可靠等缺点,设计了矿井箕斗定重自动装载系统。详细介绍了系统组成、运行过程和校正系统的工作原理。实际应用表明,该系统的使用提高了运行可靠性,节省投资,应用前景广阔。
关键词:箕斗;定重装载;PLC
引言:传统的提升式装载系统采用定量称进行称量,这种称量结构具有以下一些弊端:(1)结构复杂,易出故障;(2)水分含量大的原煤滞留定量斗的情况较为突出,增加空气炮进行疏通增加了成本和复杂度[1]。针对以上情况本文提出了一种非接触称量技术的矿井箕斗定重自动装载系统,结构简单,运行经济可靠。该系统的使用减少了硐室开凿面积和凿井深度,降低了提升高度和排水高度,节省投资。
一、传统的箕斗提升式定量装载系统
传统的箕斗提升式定量装载系统在实际的使用过程中,定量斗箱式装载设备的箕斗滞煤严重,且滞煤量极具不确定性[2]。如图1所示,对于这些煤矿因为煤质粘度大,原煤因为潮湿而滞留定量斗的问题,工程技术人员往往会通过在定量斗4中装载空气炮的方法迫使定量斗中原煤进入提升箕斗。而且,在这种情况下,微电子元件受井简涌水严重、硐室湿度大等恶劣条件影响,很容易损坏,进而导致控制设备出现故障而停运。在这种煤质的煤矿的生产过程中,通常将主井箕斗提升改为手动操作。操作时凭经验及感觉,估计滞煤量,采用打点计数(27~55s)装载,很不准确,常出现半罐提升和溢出,撒煤量大,提升能力受到极大的限制。
1-煤仓;2-给煤机;3-皮带机;4-定量斗;5-提升箕斗
图1 传统的提升式装载系统
二、箕斗定重自动装载系统
矿井箕斗定重自动装载系统,有效地实现了主提升自动定量装载,结构简单,使用安全可靠,经济、合理。改进了原系统的硐室结构,取消定量斗,采用原煤经皮带直接进入箕斗的装载结构。本系统造价低,平均为6000元/套,投资不到定量斗箱式装载设施0.3-0.4%,一方面降低了装载系统的复杂程度,减少了投入成本,避免了不必要的故障隐患;另一方面使用经济效益好,减小了硐室体积(开挖硐室2500m3左右),对新建矿井可减少建井深度10m左右,每次提升减少提升距离10m,排水高度减少10m,节约了主井建设成本。
本文所介绍的矿井箕斗定重自动装载系统,包括给煤机,箕斗提升系统,定量称重装置,程序控制器,皮带运输机,所述给煤机输送物料到皮带运输机,皮带运输机喂料口的设置和加料状态下提升箕斗的加料口对应。所述定量称重装置的一次检测元件采用霍尔传感器[3],所述定量称重装置包括磁铁和一组或并列的两组霍尔传感器,所述霍尔传感器组中的每一个霍尔传感器依次安装在井筒一侧,磁铁和霍尔传感器对应安装在提升箕斗上,所述霍尔传感器输出信号连接程序控制器;程序控制器输出信号控制连接给煤机,并向提升控制室发出停车和运行信号。
自动装载系统在提升控制室设有微机控制系统,所述程序控制器和微机控制系统交互连接,程序控制器输出信号控制连接给煤机和提升箕斗提升系统,微机控制系统包括人机界面[4]。
矿井箕斗定重自动装载系统的使用有效地实现了主提升自动定量装载,结构简单,使用安全可靠,经济、合理。改进了原系统的硐室结构,取消定量斗,采用原煤经皮带直接进入箕斗的装载结构。
三、箕斗定重自动装载系统的实现
箕斗定重自动装载系统,采用霍尔探测传感器感知箕斗位置,控制精度高、电气隔离性能好,能有效避免强电部分窜入弱电部分,故障率基本为零。在井筒一侧安装霍尔传感器一组,在箕斗上安装磁铁一个,根据原煤重量和钢丝绳长度成正比的原理进行原煤称量。当箕斗下放到指定深度后,系统通霍尔传感器的反馈获取箕斗在装载过程中的下移量(即钢丝绳的拉伸长度)。当钢丝绳拉伸达到指定长度,即表示装载到设定重量。于是系统停止装载,发出提升信号。
矿井箕斗定重自动装载系统的控制原理图如图2所示。该系统包括煤仓1,给煤机2,箕斗提升系统,定量称重装置,程序控制器,所述定量称重装置的一次检测元件采用霍尔传感器,所述定量称重装置包括磁铁4和一组或并列的两组霍尔传感器6,所述霍尔传感器组中的每一个霍尔传感器依次安装在井筒一侧,所述磁铁4和霍尔传感器6对应安装在提升箕斗5上,所述霍尔传感器输出信号连接程序控制器;程序控制器输出信号控制连接给煤机2,并向提升控制室发出停车和运行信号。所述的矿井箕斗定重自动装载系统,包括皮带机3,所述给煤机2输送物料到皮带机3,所述皮带机的喂料口设置与加料状态下提升箕斗5的加料口对应。
1-煤仓;2-给煤机;3-皮带机;4-磁铁;5-提升箕斗;6-霍尔传感器;7-电子称
图2 系统的控制原理图
四、箕斗定重自动装载系统的校称系统
矿井箕斗定重自动装载系统在实际的使用情况下,硐室设计比较容易完成。在原定量斗上方加装封闭地板,皮带机进行加长前移,主井箕斗底部重定位钢梁位置,即可完成硐室设计。但由于着塑性变形、气候会引起钢丝绳的蠕变等原因,因此需要设计行之有效的校称系统,针对钢丝弹性拉长引起的误差进行校正。
箕斗定重自动装载校称设计原理如图3所示:图3(a)中,在提升箕斗下方安装一个煤安电子秤7,作为校称的依据。图3(b)是校称原理图,图中,实线是深度和时间的曲线、长虚线是电子秤读数和时间的曲线。假设当提升箕斗5的下放深度达到460m时,电子秤开始有读数。随着时间的推移,皮带机3开始向提升箕斗中加煤,电子秤7的读数也随之变大。当读数达到额定称量值时,停止皮带装载。随后,绞车开始提升箕斗。而由于箕斗中已经装载了煤,所以在电子称读数回到0之前,箕斗并没有提升,而绞车房的深度指示(该值由天轮的旋转产生)发生了变化。下放深度和箕斗离开电子秤的深度之间的差值及为调整值。该调整值通过选择不同的霍尔检测探头来进行校正。
(a)为电子秤安装图;(b)校称原理图
图3 校称系统设计原理图
五、结语
矿井箕斗定重自动装载系统是基于PLC控制装置,采用微机技术对各霍尔传感器的信号进行采集,并根据设定进行自动装载,装载完毕后向提升控制室发出停车和运行信号,有效地实现了主提升自动定量装载,结构简单,使用安全可靠,经济、合理。
参考文献:
[1] 李海波.对煤矿立井提升箕斗的发展c
