高校非理工类专业工业机器人工程实训教学改革探索
明显诚 王国超

摘? 要 目前,重庆理工大学工业机器人工程实训主要针对机械类专业开设全周期教学内容,对于少学时的非理工类专业学生则普遍采用认知实习,已经不能满足发展需求。随着学科间交叉融合深入,有必要将工业机器人新兴教学内容应用到非理工类专业学生实训上,因此在课程设置、考核方式等方面进行相应改革,通过构建网络学习云平台、设计虚拟仿真在线学习系统等多种方式,用于非理工类专业学生实践教学。
关键词 非理工类专业;工程实训;实践教学;工业机器人;翻转课堂;虚拟仿真在线学习系统;云平台;MOOC
中图分类号:G642.0? ? 文献标识码:B
文章编号:1671-489X(2020)04-0128-04
Teaching Probe of Universities Industrial Robot Practicum for Non Science and Engineering Majors//MING Xiancheng, WANG Guochao
Abstract At present, the industrial robot engineering training in our?school mainly focuses on the full cycle teaching content of the me-chanical specialty, while the cognitive practice is widely used for the non science and engineering students with few class hours, which can no longer meet the development needs. With the deepening of?interdisciplinary integration, it is necessary to apply the new teaching?content of industrial robots to the practical training of non science and engineering students. Therefore, the corresponding reform should?be carried out in terms of curriculum setting and assessment methods.?Through the construction of network learning cloud platform, the design of virtual simulation online learning system and other ways, it can be used for practical teaching of non science and engineering students.
Key words non science and engineering majors; engineering trai-ning; practice teaching; industrial robot; flipped classroom; virtual simulation online learning system; cloud platform; MOOC
1 引言
目前,重慶理工大学工程训练中的工业机器人实训模块针对非理工类专业学生采取的是认识实习,主要实训包括工业机器人行业背景了解、工业机器人各个组成部分认知、工业机器人坐标系运动方式掌握等基础内容,完成简单仿真作业任务(工具坐标系创建、机器人系统创建、简单路径的规划等)。教学方式则采用实训教师演示的方式。现行的教学内容和方法已经不能满足对于非理工类专业学生的实训要求,主要有下面一些弊端。
1)学生普遍“走马观花”,兴趣不高,教学效果较差。非理工类专业学生在进入工作站进行实训时,对于工业机器人方面是没有专业知识背景的[1],等同于从零开始学,按照常人的学习定律,势必经历一个漫长的初期艰难过程。因此在短时间灌输式教学过程中,学生很难找到兴趣点和切入点,最终提不起学习动力,无功而返。
2)随着新经济技术领域的不断发展,中心开展的工业机器人实训教学内容也与时俱进,不断增加,层出不穷,却很少思考怎么应用到少学时的非理工类专业教学上来,还是受固有思想的束缚,实训模式单一,实训案例简单粗狂。这两者之间形成不可调和矛盾,亟待解决。
3)科学素养和人文情怀没有建立[2]。针对非理工类专业学生的工业机器人工程训练课程还局限于单学科以及技能训练传统观念,没有做到学科交叉融合。评价考核机制较为单一,除了简单的仿真任务评定成绩之外,更多的是关注实习完毕之后报告册成绩评定。这样不仅严重束缚了学生个性化的发展,也抑制了学科间的互融互通。新经济对于人才的要求已不再局限于把本专业知识学好,非理工类专业学生更需要学习新技术新领域,要养成良好的科学素养,学习科学情怀,具备科学理念,学会沟通,善于协作,协调事物能力等。这样的要求同样适合于机械类专业学生。
2 针对非理工类专业工业机器人工程实训教学改革措施
改革措施实施需满足的前提条件
1)在设计制作网络学习资料和素材的时候,每个知识点信息量不能过大,但覆盖面要有广度,要有很多可选性和备选方案[3]。这样的目的主要是帮助没有专业知识背景的非机类专业学生初期更容易找到自己感兴趣的切入点或是目标点,从而带着兴趣学习,提高学习动力。如在网络在线平台设置讲解机器人坐标系的时候,除了常用的大地坐标系、基坐标系、工具坐标系以外,不常用的工件坐标系也要讲解出来。为什么要设置工件坐标系?最大用处是什么?学生通过学习这个宽范围的知识点,只要找到一个坐标系的切入点,学习弄懂后,其他几个坐标系自然就会融会贯通。
2)开发在线教学系统时,要与传统教学手段相比较,不能一味地采用先进教学手段,也必须与传统教学手段相结合,要注重解决传统教学手段在教学过程中无法解决的问题[4]。如传统黑板、粉笔撰写板书或PPT教学时,信息量停留时间较短,学生不容易完全消化吸收知识点;如果采用在线PPT、微视频、图片等教学资源,学生便能反复学习,思考问题,记忆知识点,领会知识点。
3)学生是有个体差异的,要体现出学生的主体性。个性化是培养创新创业能力、跨界整合能力的内在要求,也是对新时期工程教育对象学习和思维习惯的响应[5]。因此必须尊重学生作为个体“人”的发展需要,充分考虑每一个学生的个体差异,给所有学生以充分的机会来达到学习成果[5]。在开发课件资源的时候,教师必须听取学生的意见,综合各种因素的影响。
4)所传授的知识要点都需要有新意和创意[6]。如在讲解如何新建一个工具坐标的时候,用到的方法则是“四点法”和“六点法”,完成一个工具坐标系的创建。那么可以给出学生思考性问题,即能否在已知坐标参数的情况,通过输入各项参数值来创建坐标系?也就是提出一些新的方法和途径达到同样的效果,用多种启发性的问题来引导学生学习。
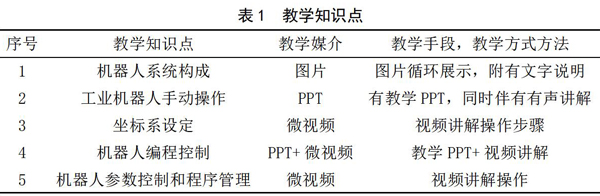
创建网络在线教学信息辅助资源(PPT、图片、微视频等)? 对于少学时非理工类专业学生,传统的“一讲二学三练”的工程实训教学方式已经不适用。有限的课堂时间必须在这个练字上下功夫,讲和学则要放在课前完成。设计在线课程的方式方法遵循MOOC的先进理念,通过与微软公司战略合作,搭建在线网络平台。而实训教师则需要将传统讲堂搬到网络上来,分阶段和步骤来设置教学知识点,如表1所示。
微软与学校工程训练中心开展战略合作,共同研发架构实验及教学智慧云平台,中心教师则在平台上构建各种类型的教学资料,如图1所示。将学习进程分为四个阶段:基础型—综合型—设计型—创新型。非理工类专业学生全体需要完成基础型和综合型项目训练,针对学生个性化发展进而研发设计型和创新型项目。
图1-a所示為一个知识点所要完成的学习流程,主要包含项目简介、学习目标和阶段步骤,学生最喜欢的环节在于问答和项目评论,因为评论区是学生讨论最激烈、思维最活跃的地方,能激发学生的学习动力;而问答环节,学生提出自己的学习疑问,教师都会一一在线或事后做出解答。图1-b所示在阶段步骤,学生根据项目简介和学习目标有计划地分步骤学习,点击进入相应的教学资源链接。
在教学资源设计这块,充分考虑知识点的难易程度而配以不同的教学媒介和教学手段,对较为简单的则附以图片资料讲解,对难度大的知识点则附以教学视频指导,对难度适中的则附以PPT+视频讲解的教学方式。
创建工业机器人工程实训网络在线仿真系统(机器人仿真)? 由于工业机器人工程实训教学的特殊性,决定了工业级虚拟仿真在教学过程中具有不可替代的作用[7]。因此在课前在线平台学习过程中,就必须将所学知识点通过在线仿真达到实践的目的,这也是本中心云平台最大的特点和作用之一。与华航唯实和亚龙教育装备公司合作研发构建的虚拟仿真在线学习系统如图2所示。学生需要在阶段步骤下的模拟实验环节进入仿真的链接,然后在系统里面按照步骤提示完成模拟实验。在逼真的仿真操作环境中,学生对于知识点的实践不再像以往必须在实训机房教室学生机上通过专门的仿真软件才可以学习,而是不受时间、地点和环境因素的影响,在学生宿舍或是其他教室只要连上中心服务器,进入云平台,就可以随时随地练习。
3 非理工类专业任务驱动启发式实践教学活动设计
课堂上的教学活动注重“问与答”和“练”,这种问答并不是传统教学中死板的教师问学生答,而是大胆地将学生作为课堂的主体,学生在实操过程中提出疑问,教师做出解答。解答不是一味地立即给出正确答案,而是有针对性地进行引导,启发学生自己在实习过程中找寻到问题的答案[8]。
发散与集中思维教学? 对于不具备专业知识背景的非理工类学生来说,采用发散思维的教学方式来激发课堂上的学习兴趣,是解决学习困难问题的一种有效途径。为了真实反映学生在线预先学习的效果,课堂上就得设置问答环节,甚至有布置课堂作业,将在线学习系统中的知识点一个个渗透到问题中进行发散。课堂上学生则分成3~5人一小组,完成课堂作业,回答教师设置的问题。因为是思维的发散,学生回答的答案必定是多种形式,所以教师不能过早给予评定,而是可以设置有多种正确答案形式。随着讨论的深入,答案自然就能显现出来,就形成集中思维定论。当然有时候也会出现相反状况,发散后不一定能集中,不能水到渠成。
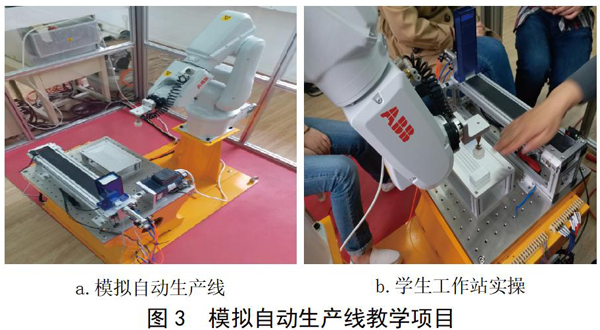
任务驱动/启发式教学活动实施? 以往教师直接在工作站进行演示操作教学,学生则跟学;教师在课程中设置任务,学生实操完成。虽然运用这种方式,学生普遍能完成既定任务,但被动接受知识的方式很少有学生会主动去思考为什么这样做?原理是什么?可以有其他更好的途径或方法完成任务吗?少部分没有跟上教学进度的学生通常蒙混过关,大部分完成的学生依葫芦画瓢之后就是一片茫然,谈不上学习兴趣,更别说深入学习了。而现在应用翻转课堂之后,就采用启发式、自我调节式和任务式的实操实训教学[8]。如以工业机器人教学项目模拟自动生产线为例,如图3所示。
教学情境中设置问题1:模拟生产线上传感器输入控制信号包含哪些?具体如何配置?让学生在现场工作站中找到各路传感器设置位置(比如限位传感器、落料传感器、传送到位传感器等),然后比对机器人输入输出信号设置表(如表2所示),找到信号的对应关系后,在示教器中进行相应传感器输入信号关联设置。
问题2:电磁阀布局位置在哪?如何设置气动电磁阀控制信号?学生在该问题的驱动下在机器人工作站中找到气动电磁阀的位置,并连接从电磁阀到气动夹具的气动管路。同时,教师让学生在示教器中配置电磁阀控制信号DO10-11,并对信号进行置1置0操作,观看信号的变化、电磁阀的控制动作,得以验证变换的原理。
问题3:在机器人完成传送带上物料拾取到储藏位置堆放过程中,哪些运动指令被使用?具体参数如何设置?教师有意识地让学生去示教机器人运动路径上的目标点,让学生边控制边体会机器人是如何完成运动的,并根据不同运动指令做出姿态变化和调整。
经过上述一系列带引导性和启发性的问题,学生自然就会产生极大兴趣。随着问题的深入,一个个的节点任务被独立成功完成之后,学生必将产生成就感和喜悦。伴随任务进行的是学生学习动力的不断增加,激发去探索和研究,意犹未尽,要求教师安排更多的项目任务。
在项目完成之后的讨论环节显得尤为重要,学生还是由原来的小组形式选取一名汇报人通过成果展示的方式,向其他小组成员和实训教师汇报项目执行情况、遇到的问题、实际解决问题情况等内容。最后,实训教师对各个小组进行综述评价。通过这种自我展示和讨论的方式增强学生的自信心与协作能力[9]。
建立完善的学生评价考核体系? 以往的评定标准采用“实操+实习报告”的方式,实行的是“大包干”的操作,没能满足学生个性化的需求,学生的综合能力和素质也体现不出来。针对非理工类专业学生设计实施新的教学方案、教学手段和教学计划后,学生进行在线云平台教学知识点的预学习、工业机器人配件组装、控制程序编写调试、成果材料制作展示等一系列综合训练,分析问题与解决问题能力、逻辑推理能力、协调组织能力等都得以提高[10]。改革后的学生评价指标不再关注实习报告册的撰写,而是放在学生的过程实践环节,分为课前、课中和课后:课前知识自学能力30%+课中实操动手能力30%+自我展示表现和团队协作能力20%+课后總结20%。还是以工业机器人教学项目模拟自动生产线为例,展示评价指标,如表3所示。
4 结语
针对非理工类专业学生的工业机器人工程实训教学模块进行改革,遵循MOOC的理念花大力气来设计云平台在线学习和仿真系统,教学活动中采用翻转课堂方式,以任务驱动和问题为导向来激发学生的学习动力和兴趣,让其主动寻找不同媒介信息源,进行自我调节式学习,从而进行动手实践。实践证明,通过改革,可以在少学时情况下达到同样的教学效果,培养学生分析问题、解决问题的能力,提高学生信心、面对新生事物的抗压承受能力,从而最终培养了工程能力。
参考文献
[1]张媛,张力,孟春玲.非机械类专业工程力学课程教学改革的探索[J].中国大学教学,2003(7):31-32.
[2]于佟佟,陆向阳.面向非机械类(文、理、管、艺)专业工程实践教学模式的探索[J].东北电力大学学报,2012,32(4):62-64.
[3]宋凤莲,盛宗建.现代工程训练与创新能力渐进式培养[J].实验室研究与探索,2016,35(9):227-230.
[4]李志义,朱泓,刘志军,等.用成果导向教育理念引导高等工程教育教学改革[J].高等工程教育研究,2014(2):29-34,70.
[5]吴爱华,侯永峰,杨秋波,等.加快发展和建设新工科 主动适应和引领新经济[J].高等工程教育研究,2017(1):1-9.
[6]崔贯勋,王勇,潘瑜,等.基于任务驱动的实践课程教学改革与探索[J].实验技术与管理,2010,27(6):164-166.
[7]胡洪钧,谢立敏,梁晓,等.工业机器人实验项目开发与实践[J].实验技术与管理,2015,32(9):201-203,207.
[8]邹建新,徐慧,孙常清.基于工程能力培养的实验教学体系构建[J].实验室研究与探索,2010,29(12):108-110.
[9]何朝阳,欧玉芳,曹祁.美国大学翻转课堂教学模式的启示[J].高等工程教育研究,2014(2):148-151,161.
[10]战强,闫彩霞,蔡尧.机器人教学改革的探索与实践[J].现代教育技术,2010,20(3):144-146.
项目来源:重庆市高等教育教学改革研究重点项目“高等院校应用技术型工业机器人工程实训教学培养模式建设研究与实践”
(基金编号:172022);重庆理工大学校级重大教学改革培育项目“智能制造背景下高水平应用型工程训练教学改革研究与实践”(基金编号:2017ZDJG08);重庆理工大学实验技术开发基金项目“基于IRB120工业机器人创新型工程实训教学模块研发与实践”(基金编号:SK201706)。
作者:明显诚,重庆理工大学工程训练与经管实验中心,讲师,研究方向为工业机器人、仪器仪表、信号检测与控制;王国超,重庆理工大学工程训练与经管实验中心,教授,研究方向为工程力学(400054)。
