在大学生课外科技项目中灵活运用多种机械原理机构有效提高学生的设计能力
蔡晓君+郭丽峰+张瑞+徐林林
[摘 要]大学生课外科技活动,灵活运用多种机械原理机构有效提高学生的设计能力,设计完成一种双向自动爬管(杆)装置,可以在该装置中巧妙运用变异曲柄滑块机构、刹车机构和交替卡紧机构等多种机械原理机构。装置总体构思巧妙,仅通过控制电机正反转即可实现装置在管(杆)上的双向运动,并实现交替卡住机架和上爪的刹车等操作,是一种很好的管道或杆件检测、清洁、维护等操作工具。
[关键词]机械原理;机构;爬管装置;曲柄滑块;刹车块结构
[中图分类号] G642.0 [文献标识码] A [文章编号] 2095-3437(2016)07-0128-02
机械原理课程设计是高等学校机械类专业学生在《机械原理》课程理论教学完成后进行的一项重要的综合性实践教学训练活动。学生通过机械原理课程设计可以进一步巩固、掌握并初步运用机械原理的知识和理论,培养学生机械系统运动方案设计能力、解决实际问题的能力以及机械开发创新能力。在设计题目的设置时,摒弃了由授课教师独立确定题目的“一言堂”做法,教师、学生、家长共同参与题目设定,并与实践紧密结合。机械原理课程设计题目由三部分组成:(1)封闭式题目——教师命题,保留多年来的经典设计题目并作适当扩展;(2)半开放式题目——结合学科竞赛、教师科研项目等实际需求,教师、学生共同提出项目功能目标,设定成果方式;(3)开放式题目——主要由学生自主选题确定。学生自主选题主要考虑学生以及家庭研究渊源,学生长期感兴趣、有一定研究积累的特长,家长在特定领域研究成果的拓展等。
将机械原理课程设计与大学生课外科技训练相结合,教师指导学生依据兴趣选题,充分调动社会、家庭参与研究训练的积极性,题目采用学生自选和教师指定相结合的原则,具有学生感兴趣的诸多因素。如双向管道爬行装置的设计与制作、糕点切片机的设计与制作、具有逃生功能自动窗的设计与制作等。
在双向管道爬行装置的设计与制作中,学生首先对该装置的实际运用进行了深入的调研。发现工程实际中存在大量的管道或者杆状的结构,对于它们的维护、监测、清洁的手段相对比较落后,基本靠人力手工完成。如能设计一种在管(杆)状结构上自动灵活双向移动的装置,实现方便、快捷、平稳的爬动,将非常必要,而且可将该装置作为一个平台,整合在其他的装置上完成所需的既定动作,在生产生活实际工作中将扮演多种运送机械手的重要角色。
一、爬管(杆)装置总体设计思路
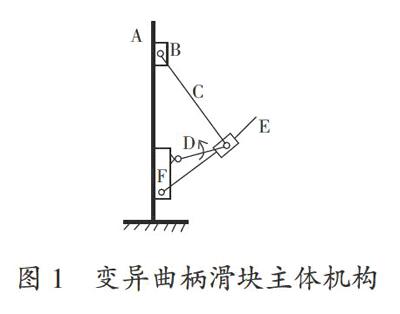
为了实现装置在管上自由爬动,而且运行平稳安全,结合机械原理已知各个运动机构,最终选择变异曲柄滑块机构为主体爬行机构,而锁紧机构确定为转动的刹车橡胶块机构,具体结构示意图如图1所示。
在图1变异曲柄滑块主体机构中,A为装置工作时依附的管(杆)构件,B为上爪,套在管A上,C为连杆,连接上爪和曲柄,D为电机驱动的曲柄,可以整周转动,安装在机架上。E为滑动摆杆,能在曲柄的带动下左右摆动,F为机架,可套在管A上。
电机驱动曲柄D,在曲柄D驱动下,滑块机构能实现装置在管构件上的上下爬动的要求,而锁紧机构则整合在上爪B和机架F上,实现上爪和机架的交替锁紧,从而达到设计目的。
二、变异曲柄滑块机构的设计
根据设计要求,所爬的管(杆)机构直径在50~100mm范围内,其余各运动机构的尺寸均按该要求设计。根据实际装置的尺寸,计算选择曲柄D的长度为Ld=100mm,曲柄D与连杆C的尺寸比设计为1∶3,故连杆Lc=300mm,摆杆E设计为与连杆C等长,即摇摆LE=300mm。为确保装置在管(杆)构件上平稳运行,选择其平均爬行速度为v=10mm / s,曲柄转动一周装置爬行400mm,用时40s,所以曲柄角速度ω=1.5r / min。图2为设计完成的装置整体三维模拟图。
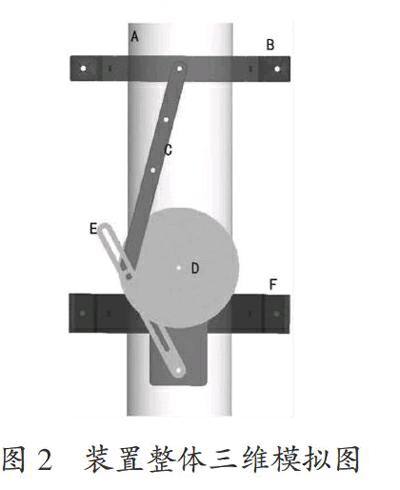
如图2所示,工作时驱动电机安装在机架F上,随着电机运动带动曲柄D转动,当机架F夹紧时,曲柄D转动带动连杆C的上爪B移动;当上抓B加紧时,曲柄D转动时可带动连杆C及机架F移动。这样上爪B与机架F交替加紧、移动,可以完成装置在管(杆)上的平稳滑动。
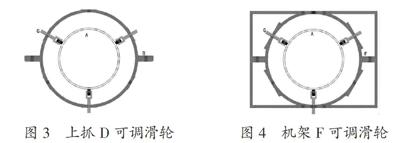
为保证装置能够具有一定负重,并且在管(杆)构件上平稳滑动,如图3、图4所示,上爪B和机架F均由三个可调滑轮G压紧在装置依附的管道上。
三、转动刹车块结构的设计
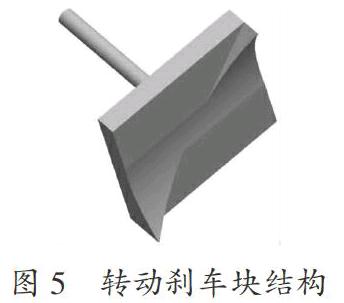
为保证上抓B和机架F能够平稳、连续交替夹紧管(杆)构件,特别设计制作了用于夹紧的转动刹车块结构,如图5所示。
如图5所示转动刹车块设计成中间凹状结构,便于箍紧管(杆)构件,为有效增大摩擦阻力,材料可选用橡胶等非金属材料。作为装置的关键零件,运动时刹车块结构转到一定位置时能保证在管(杆)构件上卡紧上爪B或机架F,从而达到装置交替爬动的目的。
结合上述讨论的变异曲柄滑块机构设计,如图6、图7所示为转动刹车块结构工作原理示意图。在图6中曲柄D转动,连杆C随之摆动,刹车块H与连杆C固连,所以刹车块H也能随着连杆C转动,此时由于转动刹车块结构形状的特殊性,其会在一定位置时带动上爪B卡紧在管(杆)上。
同理,如图7所示,曲柄转动D,滑动摆杆E随之摆动,刹车块H与摆杆E固连,刹车块H也随摆杆E转动,由于转动刹车块结构形状的特殊性,其会在一定位置下带动机架F卡紧在管(杆)上。图8、9、10、11为刹车块工作状态示意图。
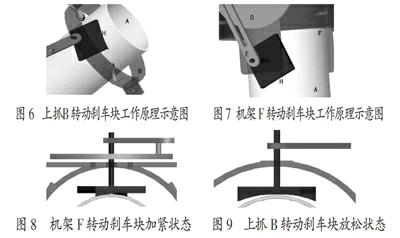

以装置上行为例,当机架F上的滑动摆杆E带动刹车块转到图8位置时,刹车块把机架F卡紧在管(杆)上,此时上爪B刹车块处于松开状态如图9所示,由于电机转动,连杆会推动上爪B向上移动;而当机架F刹车块转到图10位置松开时,上爪B刹车块则转到图11位置卡紧状态,电机转动此时会拉动机架F向上移动,这种周而复始的运动,完成整个装置沿管(杆)稳步上行。只要改变电机转向,装置可实现平稳下行,装置下行原理相同。
由于刹车块是橡胶材料,加工方便,其工作时靠摩擦力来锁紧上爪B或者机架F,所以其尺寸需要根据工作依附面的具体情况来选材及设计尺寸。
四、结论
双向自动爬管(杆)装置,主要由曲柄、连杆、滑动摆杆、上爪、机架、电机、销钉、螺栓、螺母、刹车块、滑轮零部件组成。电机带动曲柄滑块装置运行,并通过整合在其上的刹车块的转动,上爪和机架交替卡紧,从而使得装置实现上爬或下爬。整个机构设计独特,构思巧妙,能最安全便捷的实现在管状物体上的平稳移动,为工程中的管道检测维护实现自动化提供了一个很好的平台。
通过理论与实践教学活动、课外科技活动、科学研究等途径,在指导学生深入学习理论知识的前提下,将教学与大学生课外科技活动有机结合,通过项目驱动的方法贯穿始终,使学生受益匪浅。
[ 参 考 文 献 ]
[1] 申永胜.机械原理教程[M].北京:清华大学出版社,2006:50-120.
[2] 韩晓娟.机械设计课程设计[M].北京:机械工业出版社,2006:20-100.
[3] 紧固件连接设计手册[M].北京:国防工业出版社,2008:10-150.
[4] 蒲良贵.机械设计[M].北京:高等教育出版社,2015:10-220.
[5] 陆凤仪.机械设计[M].北京:机械工业出版社,2011:30-100.
[6] 江洪.Solidworks动画演示与运动分析实例解析[M].北京:机械工业出版社,2006:10-140.
[7] 杨魏.机械原理[M].北京:机械工业出版社,2012:20-190.
[8] 蔡晓君,傅水根,窦艳涛.依托教学实验基地构建工程实践教学新体系[J].实验技术与管理,2007(9):125-127.
[9] 蔡晓君,刘湘晨,窦艳涛.加强实践教育 提高学生的工程素质与能力[J].实验室研究与探索,2009(1):136-138.
[责任编辑:张 雷]
[摘 要]大学生课外科技活动,灵活运用多种机械原理机构有效提高学生的设计能力,设计完成一种双向自动爬管(杆)装置,可以在该装置中巧妙运用变异曲柄滑块机构、刹车机构和交替卡紧机构等多种机械原理机构。装置总体构思巧妙,仅通过控制电机正反转即可实现装置在管(杆)上的双向运动,并实现交替卡住机架和上爪的刹车等操作,是一种很好的管道或杆件检测、清洁、维护等操作工具。
[关键词]机械原理;机构;爬管装置;曲柄滑块;刹车块结构
[中图分类号] G642.0 [文献标识码] A [文章编号] 2095-3437(2016)07-0128-02
机械原理课程设计是高等学校机械类专业学生在《机械原理》课程理论教学完成后进行的一项重要的综合性实践教学训练活动。学生通过机械原理课程设计可以进一步巩固、掌握并初步运用机械原理的知识和理论,培养学生机械系统运动方案设计能力、解决实际问题的能力以及机械开发创新能力。在设计题目的设置时,摒弃了由授课教师独立确定题目的“一言堂”做法,教师、学生、家长共同参与题目设定,并与实践紧密结合。机械原理课程设计题目由三部分组成:(1)封闭式题目——教师命题,保留多年来的经典设计题目并作适当扩展;(2)半开放式题目——结合学科竞赛、教师科研项目等实际需求,教师、学生共同提出项目功能目标,设定成果方式;(3)开放式题目——主要由学生自主选题确定。学生自主选题主要考虑学生以及家庭研究渊源,学生长期感兴趣、有一定研究积累的特长,家长在特定领域研究成果的拓展等。
将机械原理课程设计与大学生课外科技训练相结合,教师指导学生依据兴趣选题,充分调动社会、家庭参与研究训练的积极性,题目采用学生自选和教师指定相结合的原则,具有学生感兴趣的诸多因素。如双向管道爬行装置的设计与制作、糕点切片机的设计与制作、具有逃生功能自动窗的设计与制作等。
在双向管道爬行装置的设计与制作中,学生首先对该装置的实际运用进行了深入的调研。发现工程实际中存在大量的管道或者杆状的结构,对于它们的维护、监测、清洁的手段相对比较落后,基本靠人力手工完成。如能设计一种在管(杆)状结构上自动灵活双向移动的装置,实现方便、快捷、平稳的爬动,将非常必要,而且可将该装置作为一个平台,整合在其他的装置上完成所需的既定动作,在生产生活实际工作中将扮演多种运送机械手的重要角色。
一、爬管(杆)装置总体设计思路
为了实现装置在管上自由爬动,而且运行平稳安全,结合机械原理已知各个运动机构,最终选择变异曲柄滑块机构为主体爬行机构,而锁紧机构确定为转动的刹车橡胶块机构,具体结构示意图如图1所示。
在图1变异曲柄滑块主体机构中,A为装置工作时依附的管(杆)构件,B为上爪,套在管A上,C为连杆,连接上爪和曲柄,D为电机驱动的曲柄,可以整周转动,安装在机架上。E为滑动摆杆,能在曲柄的带动下左右摆动,F为机架,可套在管A上。
电机驱动曲柄D,在曲柄D驱动下,滑块机构能实现装置在管构件上的上下爬动的要求,而锁紧机构则整合在上爪B和机架F上,实现上爪和机架的交替锁紧,从而达到设计目的。
二、变异曲柄滑块机构的设计
根据设计要求,所爬的管(杆)机构直径在50~100mm范围内,其余各运动机构的尺寸均按该要求设计。根据实际装置的尺寸,计算选择曲柄D的长度为Ld=100mm,曲柄D与连杆C的尺寸比设计为1∶3,故连杆Lc=300mm,摆杆E设计为与连杆C等长,即摇摆LE=300mm。为确保装置在管(杆)构件上平稳运行,选择其平均爬行速度为v=10mm / s,曲柄转动一周装置爬行400mm,用时40s,所以曲柄角速度ω=1.5r / min。图2为设计完成的装置整体三维模拟图。
如图2所示,工作时驱动电机安装在机架F上,随着电机运动带动曲柄D转动,当机架F夹紧时,曲柄D转动带动连杆C的上爪B移动;当上抓B加紧时,曲柄D转动时可带动连杆C及机架F移动。这样上爪B与机架F交替加紧、移动,可以完成装置在管(杆)上的平稳滑动。
为保证装置能够具有一定负重,并且在管(杆)构件上平稳滑动,如图3、图4所示,上爪B和机架F均由三个可调滑轮G压紧在装置依附的管道上。
三、转动刹车块结构的设计
为保证上抓B和机架F能够平稳、连续交替夹紧管(杆)构件,特别设计制作了用于夹紧的转动刹车块结构,如图5所示。
如图5所示转动刹车块设计成中间凹状结构,便于箍紧管(杆)构件,为有效增大摩擦阻力,材料可选用橡胶等非金属材料。作为装置的关键零件,运动时刹车块结构转到一定位置时能保证在管(杆)构件上卡紧上爪B或机架F,从而达到装置交替爬动的目的。
结合上述讨论的变异曲柄滑块机构设计,如图6、图7所示为转动刹车块结构工作原理示意图。在图6中曲柄D转动,连杆C随之摆动,刹车块H与连杆C固连,所以刹车块H也能随着连杆C转动,此时由于转动刹车块结构形状的特殊性,其会在一定位置时带动上爪B卡紧在管(杆)上。
同理,如图7所示,曲柄转动D,滑动摆杆E随之摆动,刹车块H与摆杆E固连,刹车块H也随摆杆E转动,由于转动刹车块结构形状的特殊性,其会在一定位置下带动机架F卡紧在管(杆)上。图8、9、10、11为刹车块工作状态示意图。
以装置上行为例,当机架F上的滑动摆杆E带动刹车块转到图8位置时,刹车块把机架F卡紧在管(杆)上,此时上爪B刹车块处于松开状态如图9所示,由于电机转动,连杆会推动上爪B向上移动;而当机架F刹车块转到图10位置松开时,上爪B刹车块则转到图11位置卡紧状态,电机转动此时会拉动机架F向上移动,这种周而复始的运动,完成整个装置沿管(杆)稳步上行。只要改变电机转向,装置可实现平稳下行,装置下行原理相同。
由于刹车块是橡胶材料,加工方便,其工作时靠摩擦力来锁紧上爪B或者机架F,所以其尺寸需要根据工作依附面的具体情况来选材及设计尺寸。
四、结论
双向自动爬管(杆)装置,主要由曲柄、连杆、滑动摆杆、上爪、机架、电机、销钉、螺栓、螺母、刹车块、滑轮零部件组成。电机带动曲柄滑块装置运行,并通过整合在其上的刹车块的转动,上爪和机架交替卡紧,从而使得装置实现上爬或下爬。整个机构设计独特,构思巧妙,能最安全便捷的实现在管状物体上的平稳移动,为工程中的管道检测维护实现自动化提供了一个很好的平台。
通过理论与实践教学活动、课外科技活动、科学研究等途径,在指导学生深入学习理论知识的前提下,将教学与大学生课外科技活动有机结合,通过项目驱动的方法贯穿始终,使学生受益匪浅。
[ 参 考 文 献 ]
[1] 申永胜.机械原理教程[M].北京:清华大学出版社,2006:50-120.
[2] 韩晓娟.机械设计课程设计[M].北京:机械工业出版社,2006:20-100.
[3] 紧固件连接设计手册[M].北京:国防工业出版社,2008:10-150.
[4] 蒲良贵.机械设计[M].北京:高等教育出版社,2015:10-220.
[5] 陆凤仪.机械设计[M].北京:机械工业出版社,2011:30-100.
[6] 江洪.Solidworks动画演示与运动分析实例解析[M].北京:机械工业出版社,2006:10-140.
[7] 杨魏.机械原理[M].北京:机械工业出版社,2012:20-190.
[8] 蔡晓君,傅水根,窦艳涛.依托教学实验基地构建工程实践教学新体系[J].实验技术与管理,2007(9):125-127.
[9] 蔡晓君,刘湘晨,窦艳涛.加强实践教育 提高学生的工程素质与能力[J].实验室研究与探索,2009(1):136-138.
[责任编辑:张 雷]
