机电一体化产品虚拟样机协同建模与仿真技术研究
范向红
摘要:随着我国经济的不断发展,传统的产品设计已经不能满足现代行业的发展。同时,随着科学技术不断的进步,我国机械工程有效结合自动化技术,形成新领域的机械电子工程。尤其是虚拟样机技术,结合了多种领域的先进技术,从而更好地完善产品性能。文章研究了机电一体化产品虚拟样机协同建模与仿真技术,分析该设计的体系结构及模型库的构建原理,并提出相关的见解,从而更好地促进科学技术的发展。
关键词:机电一体化产品;虚拟样机;建模与仿真
机电一体化是由机械学和电子学组成的,灵活地运用先进的计算机技术、电子技术、传感技术以及信息转换等技术,使其多项技术有效结合,研发出机电一体化设备,从而更好地带动该技术的发展。其中的虚拟样机技术,是以计算机技术为基础,使其具有一定的功能真实度,更好地代替物理样机,并有效地推动建模和仿真领域的发展。
1.虚拟样机技术分析
虚拟样机技术充分利用建模技术、仿真技术、信息设计以及管理技术,对于机电一体化产品进行全寿命及全结构的设计工作,同时进行综合分析、评估和管理。随着我国安全第一、质量第一生产标准的提出,国家对于机械产品的全生命周期管理意识在不断加强,在提高生产效率的同时,也有效地提高了经济效益,因此,虚拟样机技术具有很大的发展空间。
1.1虚拟样机概念分析
其定义是指基于计算机技术,有效地代替物理样机,同时具有标准的真实度。其设计是指代替物理样机之后,对于候选设计进行有效的评估。其环境是指模型、仿真和仿真物的综合,将产品的多种结构良好结合,使其完成理论到设计的过渡。该技术会充分利用其环境,对于机电一体化产品进行全方位的建模研究,并利用虚拟和仿真领域的综合,为机电一体化产品设计提供不同的见解。同时,虚拟样机技术与集成化产品的设计是有关系的,是在建立物理样机之前,利用基于计算机的功能及机械系统,构建数学模型,然后通过仿真分析确定该结构在实际情况下的特征,如外观、空间结构及动力学等,通过不断调整,得到最佳的设计计划。
1.2关键技术及需求
虚拟样机的关键技术主要包括系统总体技术、集成环境技术、综合建模技术、协同仿真技术、过程管理技术、虚拟环境仿真及校正技术。对于该技术的设计,不仅需要满足功能规定的外观要求,同时还要满足产品使用环境及操作等条件,是通过对于产品的概念、创新、系统等设计阶段,建立数学模型,通过数学模型,对产品进行综合分析,使其产品在达到规定行为的需求时,还符合产品操作、制造及销毁等过程的需求。
1.3虚拟样机技术对于产品的设计方案
首先,明确设计的任务,即产品需节省时间和经济,同时有效提高质量和效率,然后在再改进产品。流程包括建模、测试、校验、改正及目的操作。其中,建模主要是指单领域、多领域协同、约束、驱动等模型。测试是虚拟测试机器和环境、测量、方针等过程。校验是指按照系统的性能,对参数进行敏感性的分析等。改进主要是指细化、迭代、优化。目的操作主要是指方案生成、模板设计等操作。校验和改进及目的操作之间有着评估分析的联系,即对于校验的评估分析,确定结果是否合理,当结果不合理时,就要进行改进环节;当评估分析结果合理时,就可以进行目的操作。
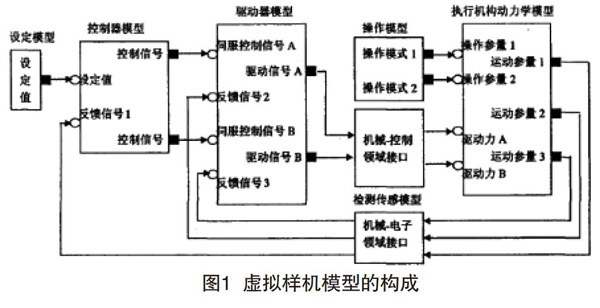
1.4产品虚拟样机的组成
基于机械控制协同的机电一体化产品,虚拟样机模型的构成如图1所示,行为模型由产品子系统组成,且具有层次性等特点。
2.支撑环境分析
2.1产品功能模型
产品的功能主要包括控制、动力、传感检测、操作及结构功能。主要由机械、电子和软件组成,主要划分为物理和控制系统,其中,物理系统包括驱动、执行等。机电系统中3个系统的关系是,执行系统是指广义执行机构子系统,控制系统包括信息处理、控制以及传感检测子系统。首先,执行系统中驱动元件和执行机构会向传感子系统发出检测信号;然后,传感系统向信息处理子系统发出反馈信号;最后,处理子系统会向执行子系统发送控制信号,从而将这几种子系统更好地综合。
2.2设计过程模型
机电一体化产品的方案设计过程模型主要包括:功能层,含有机电系统功能的理解、动作、分解以及控制和执行动作子功能;行为层,含有检测、控制过程和执行动作;结构层,主要含有传感器、软件及控制器、执行机构,同时通过机电系统的结合理论,确定系统是否可行,最后通过评估,确定最佳的设计方案。其中,仿真模型的分解和组合的流程主要包括系统模型、子模型以及元模型3层,其中系统模型会分解成3个子系统模型,继续经过多层分解成9个最小模型单元;同时每3个最小模型单元,通过合并成1个最小模型单元,继续多层组合成子系统模型,再经过组合成系统模型。
3.机电系统主体建模与仿真技术研究
广义执行元件不仅是驱动元件以及执行结构的综合,同时也是机电系统的主体。对此,本文主要研究该结构在驱动情况下的运动和动力学特征。
3.1运动学、动力学研究
运动学是根据微动驱动、多自由度以及等、变转动或移动确定元件,与运动链的运动探究及综合,构建不同的运动学方程,从而进行有效的研究。其中,动力学通过不同系统的动力学方程的建立,在驱动函数基础上,确定执行构件的运动和动态情况。对于动力学的研究,还会涉及正、逆问题,主要是指根据作用力、力矩,建立相关模型,从而求出运动轨迹。相反,逆问题就是己知运功轨迹求的作用力。
3.2建模方法分析
对于广义执行机构的建模方法,主要是利用ADAMS为基础的运动学,或是动力学的建模方式。其中涉及(非)线性代数方程以及积分算法等。
3.3仿真方法
同时利用建模方法的软件,利用参数化分析法,如参数化点坐标、设计变量、参数运动式、参数表达式等。主要的流程是结合构件、驱动和力进行建模,然后通过,对于生成的结果,即设计是否最优,当结果为是时,会进行仿真结果后处理,并绘制循环目标函数,以及变量之间的关系曲线,输出仿真动画并将结果进行列表、分析;当结果为不是最优时,此时需要改变设计的变量值,调整建模,再进行求解器解算,将结果进行分析的循环,直到求解器解算的结果显示设计是最佳的,同时还可以运用SimMechanics模型的仿真方法进行分析。
4.产品结构控制综合分析
4.1综合特性
基于物理模型进行的仿真模型,其中物理模型主要包括协同以及能量与信息耦合的子系统。同时,产品中的执行结构,主要是进行能量的传换,与物理模型的能量子系统相互对应。而机电系统中结构和控制的综合,主要体现在时间与时序、空间的协同,以及控制和运动精度的相互性,同时还有结构子系统的可控性,坚持控制器稳定、追踪以及安全可靠控制的原则,使其控制系统的控制器有效配合。
4.2仿真建模技术分析
建模是为了能量更好地转换,其中键合图方法是针对于动力学系统,完成能量转换、储存以及消耗的结构分卡斤,将不同性能的变量通过能量守恒定律,转换为共轭变量,即势、流变量,使其对于这2种类型的变量综合,完成不同范围内的模型交互。同时还有多极点建模方法,是将共轭变量进行综合,使其模型交互成对出现,从而更好地拓展建模领域。而方框图方法则是利用基础的控制模块,将其利用线段进行连接,此时的模块都是由传递函数综合而成,不仅可以将控制系统进行很好的表达,同时也能轻易地获得传递参数,从而有效的分析系统。
5.结语
综上所述,本文通过对于机电一体化产品虚拟样机协同建模与仿真技术的分析,掌握了机电系统的产品功能模型,从而合理地分析产品、结构与控制的特征。通过动力学以及运动学的特点、建模仿真技术的分析、以及仿真环境,从而更好地表明其建模方式。借助结构额和控制的协同,总结出具有多功能、多层次的仿真建模方式,从而更好地优化设计方案,积极地促进国家科学技术、科技创新以及社会经济的发展。
