小水线面双体船阻力及其数值模拟方法研究
陈建涛 刘枫琛 王桂云 李遵伟

摘 要:本文对小水线面双体船阻力进行了分析,采用计算流体力学软件对小水线面双体船实尺度模型的粘性绕流进行了数值模拟,根据需要提取残差监视曲线图、阻力系数监视曲线图、片体表面动压力分布图、空气体积分数分布图等,并将各航速下的阻力模拟结果经过一定处理后绘制成船舶阻力曲线。说明了对小水线面双体船三维粘性扰流水动力性能数值模拟的可行性,数值模拟在阻力计算和流场表达方面的优势及数值模拟在多目标选优和单目标优化方面的应用。
关键词:小水线面双体船 船舶阻力 数值模拟 粘性绕流 计算流体力学软件
小水线面双体船又称为半潜式双体船,是一种为了改善耐波性、减小兴波阻力,将常规双体船的片体在水线处缩小宽度形成狭长流线形水线面的双体船型。
小水线面双体船由常规双体船发展而来,和常规双体船一样,具有甲板面积宽广、使用空间规整而充裕、横向稳定性好等优点。此外,小水线面双体船还具有其他的一些优点:高速航行时,静水阻力性能和波浪阻力性能好;螺旋桨轴线沉深较大,推进效率高;水线面面积小,耐波性能好;易实施联合控制操纵系统,操纵灵活,航向稳定性及其回转性能良好;船体表面外形简单,便于模块化设计和建造,建造成本低周期短;静稳性好,具有较强的生命力。
目前,世界各主要造船国家都在致力于小水线面双体船的研究开发,并将其应用军船和民船之上。而船舶阻力作为船舶快速性能的重要方面,是进行小水线面双体船设计首要予以保证和优先进行研究的。
小水线面双体船阻力及其研究方法
小水线面双体船总阻力Rt主要包括兴波阻力Rw、粘性阻力Rv、附体阻力Rap和波浪中航行时的阻力增值Raw,即:
Rt=Rw+Rv+Rap+Raw (1)
与单体船一样,小水线面双体船的阻力研究方法有理论计算分析法、数值模拟法和模型试验法等三种。理论计算分析方法有线性理论、面元法理论及经验公式估算等;常用的数值模拟方法有有限差分法、有限体积法、有限元法、有限分析法等;模型试验对于小水线面双体船阻力的确定仍然起着决定性的作用,常用来验证其他阻力研究手段的可靠性。
小水线面双体船阻力数值模拟方法研究
水动力性能的数值模拟是通过计算流体动力学(Computational Fluid Dynamics,CFD)软件来实现的。CFD软件是专门进行流场计算、分析和预报的软件。通过CFD软件数值模拟,可以计算、分析并显示发生在流场中的各种现象,可以得到比模型试验更多的流场信息;在比较短的时间内,可以进行水动力性能的预报,在多目标方案选优方面有着广泛的应用;也可以通过改变各种参数预报性能,达到单目标优化的目的。
1、几何模型的建立
某小水线面双体船片体的主要尺度:下潜体长度LB=59.67m,下潜体直径DB=3.32m,支柱体长度 LS=38m,支柱体沉深HS=2.73m,支柱体最大厚度tS=1.6m,两片体中心距2b=16m。
建立几何模型:首先,根据支柱体和下潜体的外形生成坐标数据,进行适当的处理后建立建模软件能够识别的数据点文件;然后,在建模软件中导入数据点文件,分别建立几何体;最后,进过布尔运算等处理生成一个完整的片体实体模型。
小水线面双体船的两个片体及其流场左右关于船体中纵剖面对称,基于加快数值模拟计算速度方面的考虑,只需建立一个片体模型并设置对称面便可实现整个流场的模拟。
2、构建计算控制域
数值模拟的目的是得到小水线面双体船片体以一定航速在静水中航行的阻力及流场信息。在进行数值模拟的时候,根据运动的相对性,可以将片体模型固定在一个位置,而给水流一个来流速度。
小水线面双体船实际航行的时候,可以认为片体处于无界的流场中。因此,从理论上讲,进行数值模拟的时候也应该将片体模型放置在一个无限大的流场中,才能保证数值模拟与实际情况相符。然而,在实际计算中计算控制域不可能取到无限大,我们只有根据片体模型的尺寸和实际流场计算的要求建立适当大小的控制域。在数值模拟中,控制域的外形也是非常重要的,它影响到网格划分的网格划分的网格类型和网格质量,进而对数值模拟的精度和需要的时间产生重大的影响。
计算控制域分上、下两个部分,上部分控制域流过的流体是空气,下部分控制域流过的流体是水。控制域为一长方体,其尺寸长(x轴,船长方向)为456m、宽(z轴,船宽方向)为100m、高(y轴,吃水方向)155m。
3、网格划分
双体船阻力数值模拟中,网格划分的原则:①双体船表面网格大小应约为设计水线长度Lwl的6‰;②建议细化流场网格系数r*<21/2;③第一层边界层节点到船体表面的无量纲距离y+是相当重要的,对于双体船阻力计算y+的围最好是 100≤y+≤200,同时建议采用更小的r*。
由于片体表面不规则,不易生成结构化网格,所以本文在片体表面采用了非结构化的四边形面网格,减小假扩散误差,提高计算精度。体网格采用四面体、六面体和楔形的混合网格单元。
根据双体船网格划分的原则及计算机硬件配置情况,共生成了214万个混合型体网格单元,网格质量EQUISIZE SKEW≤0.88。
4、定义边界条件
根据具体的数据模拟问题的定义边界条件,来流方向沿x轴指向负方向,我们将右侧表面设定为空气速度入口和水流速度入口(velocity inlet,专门用于不可压缩流动入口定义);假定出口表面处水流不受片体扰动的影响,我们将左侧表面设定为自由流出口边界(outflow,用于充分发展的自由流出口边界定义);进行数值模拟的目的是求解片体所受阻力大小,所以将片体表面设定为壁面边界(wall,无滑移壁面条件);控制域的侧向表面及两片体流场的对称面均设定为对称边界;将整个控制域设定为流域中的流体性质。
5、求解设定与计算
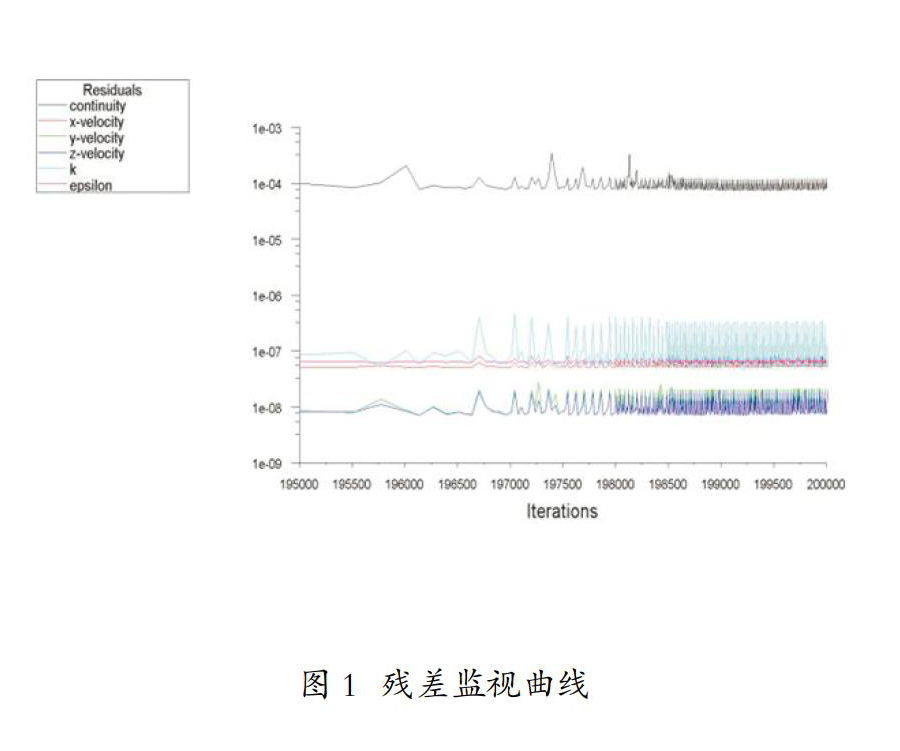
采用三维单精度求解器。首先,进行网格的处理及模型尺寸比例的设定,包括网格检查、光滑、粗化及模型比例设定;其次,求解的设定,采用分离式求解器非稳态求解,用VOF模型对自由液面进行捕捉,选用工程上常用的标准k-ε湍流模型,对于近壁区域采用壁面函数法进行处理,两相流方面将空气设置为第一相、水设置为第二相,选择精确的界面跟踪方法几何重构公式模拟,运行环境考虑重力的影响,并且进一步设置边界条件参数;再次,求解的控制,选用SIMPLE算法进行压力和速度耦合,欠松弛因子保持默认,对压力采用PRESTO!离散动量插值采用二阶迎风格式,压力用Geo-Reconstruct格式,其他均用一阶迎风格式,根据问题的需要进行多重网格和参数限制进行设定,进行求解初始化和两相流状态初始化,分别设置残差监视器、阻力监视器等作为判断收敛标准。最后,进行数值模拟计算至结果收敛。
数值模拟结果
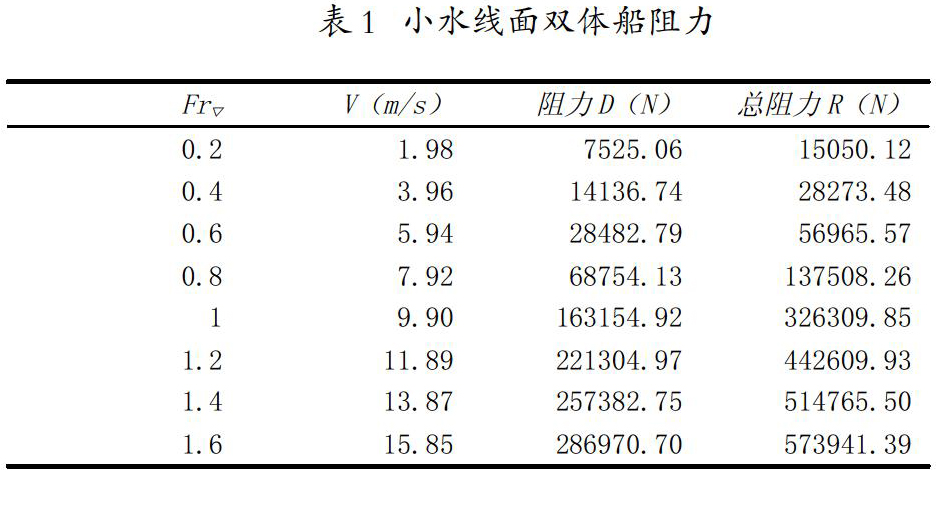
数值模拟结果的后处理:计算至收敛以后,根据需要分别提取残差监视曲线图、阻力系数监视曲线图、片体表面动压力分布图、空气体积分数分布图以及采集片体所受阻力D。
根据采集的不同航速时候片体所受阻力数据D,求得总阻力R。以航速V为横轴,总阻力R为纵轴绘制出小水线面双体船阻力曲线图。
结论
本文对小水线面双体船阻力进行了分析,并对其数值模拟方法具体过程进行了研究。通过分析研究,可以得到如下结论:①数值模拟方法可以很好地进行小水线面双体船流场计算、分析和预报,进而预报其水动力性能;②通过对流场的计算分析和预报,计算流体动力学软件可以简单方便地进行小水线面双体船阻力计算和预报,为船舶快速性设计提供依据;③通过对流场的计算分析和预报,计算流体动力学软件可以直观形象地显示发生在流场中的各种现象,得到比模型试验更多地流场信息;④在船舶粘性数值模拟自由液面的模拟和捕捉上,VOF模型具有一定的优势;⑤数值模拟方法可以在比较短的时间内进行小水线面双体船水动力性能的预报,在多目标方案选优方面有着广泛地应用,并通过改变各种参数预报性能可以达到单目标优化的目的。
参考文献:
[1]赵连恩,谢永和.高性能船舶原理与设计[M].北京:国防工业出版社,2009.
[2]李云波. 船舶阻力[M].哈尔滨:哈尔滨工程大学出版社,2006.
[3]Rui Deng, et al. Discussion of Grid Generation for Catamaran Resistance Calculation [J]. Journal of Marine Science and Application ,2010,9:187-191.
(第一作者单位:山东省海洋仪器仪表科技中心,第二、三、四作者单位:青岛中乌特种船舶研究设计院有限公司)
