计算机视觉测量技术的图像轮廓提取方法分析
陈雪
摘要:文章提出了一种图像轮廓的提取方法,这种方法具有更高的精度和抗干扰能力,并且对我国计算机视觉测量技术的发展前景作出了展望。
关键词:计算机技术;轮廓提取;视觉测量
计算机视觉测量技术是一种综合技术,融合了光电子技术、计算机技术、图像处理技术等多种技术。在对采集对象进行处理之后,就可以得到目标物体的几何特征参数。想要得到准确的图像,就必须重视目标物体的轮廓提取参数。在计算机视觉测量系统中,为了保障测量的精准度,选取合适的轮廓提取方法也是很重要的。边缘检测法是轮廓提取方法中主要的内容,该方法借助于空域微分算子,使图像和模板完成卷积。边缘检测方法中的局部算子法,具有实现简单、运算速度快等优点。梯度算子、Sobel算子、Roberts算子、canny算子,都是经典局部算子法。本文提出了基于灰度阈值法的原理,根据链码跟踪技术对轮廓信息进行存储,实现图像轮廓的提取。这种方法具有准确度高、稳定性好等优势,在工程上的应用十分广泛。
1 轮廓提取的原理
轮廓提取指的是从物体图像上得到物体外形,它能够有效保障测量的精确度。由于计算机视觉测量图像只含有目标和背景2类区域,应该利用阈值分析法对图像进行分割。为了确保二维图像中没有噪音,可以利用非线性的滤波能力消除噪音。为了实现轮廓提取,将会掏空图像内部的点。通过链码跟踪技术对轮廓的信息进行存储,使图像的轮廓处理工作量得以减轻。轮廓提取的工作流程是:首先对原始图像进行预处理,消除噪音后可以得到平滑的图像。然后,对图像进行阈值分割得到二维图像。对二值图像进行轮廓提取,就可以得到图像的边界点。最后,再根据跟踪算法将轮廓存储为链码序列的形式。
2 图像轮廓提取的关键技术
轮廓提取技术是计算机视觉测量技术中的重要组成部分,轮廓提取技术主要包括图像预处理技术、阈值分割技术、轮廓提取技术和链码跟踪技术等内容。本文将具体介绍几种关键的图像的轮廓提取技术。
2.1 图像预处理技术
通过光学成像系统产生的二维图像经常含有各种噪音。为了提高计算机的视觉能力,增加计算机的分析和识别能力,必须消除掉这些二维图像中的噪音。有目的地显示出有用的信息,消除掉无用的信息,这种方法就是图像预处理技术。图像预处理技术能够有效增加图像的清晰度,是一种关键的计算机视觉测量技术。图像的预处理技术是指在图像输入过程中对图像进行处理,从而得到清晰图像的技术。图像的预处理技术的内容很多,比如图像中如果含有噪音,就需要除掉图像中的杂音,提高图像的语音效果。对于一些比度比较小的图像,就需要对其进行灰度变换。对于已经模糊的图像,应该进行各种复原处理。对于失真的图像,应该采用几何方法来校正。
计算机视觉测量中的图像预处理技术,能够有效地提高图像的画面质量,让图像便于处理,更易于测量。图像预处理的方法有很多,通常情况下,主要采用图像平滑处理、图像锐化处理、图像边缘增强等技术。
2.2 阈值分割技术
由于计算机视觉测量技术中只有目标和背景两类区域,本文将采用单阈值法来分割图像。阈值分割法在实施的过程中,先要确定分割阈值,再将分割阈值与像素的灰度进行比较。
阈值分割法的原理是:首先设定图像的灰度区间在z的最大值和z的最小值之间。在该区间设定一个阈值Z,阈值Z的大小在z最小值与最大值之间,令图像中所有灰度值小于或等于Z的像素,将它们的新灰度值设定为0,大于Z的像素新灰度值设定为1。经过这样的阈值分割,就可以得到输出的二值图像。
阈值分割的工作尽量保留原图像,在此基础上,应该去掉一些冗余信息。但阈值分割法中最为关键的就是阈值z的确定,这是灰度值的突变点。本文将采用迭代法来确定阈值Z,根据灰度直方图来确定初始阈值,将图像分割为目标和背景,计算目标和背景灰度的平均值,可以利用循环迭代的方法求出差值较小的阈值,该阈值就是灰度阈值Z。这种方法求灰度值算法简单,便于实现,其具体的步骤是:首先,求出图像的最大阈值与最小阈值,令初始阈值为最大阈值与最小阈值和的一半。然后,再利用初始阈值将图像分割为目标和背景,分别求出目标和背景的平均灰度值Zo与Zb。Zo与Zb和的一般就是新阈值Z,如果新阈值Z与初始阈值相等,那么新阈值Z即为所求阈值。
2.3 轮廓提取技术
通过对阈值分割后的图像进行缺陷修补,还需要利用轮廓提取技术,最后才能得到图像中目标的二维轮廓。本文将采用掏空内部点的方法对二维图形进行轮廓提取。假定背景颜色为黑色,目标颜色为白色。当目标中有1个点为白色,这个内部点周围的8个点都为白色时,就可以将这个点和它周围8个点都删除,把内部点全部掏空。
在二值图像中,假设背景的灰度为0,目标灰度为l,那么边界轮廓的提取方法如下:如果中心像素值为O,那么其余相连8个像素均规定为1;如果其余相连8个像素为1,那么将把中心像素值改为0;除此之外,中心像素将一律设定为1。根据这样的规则,就可以得到图像的轮廓。
2.4 链码跟踪技术
链码是一种改进的坐标序列存储结构,链码用指向中心像素P的8个方向来表示,每个方向都存在着45度的夹角。对于轮廓图像来说,除了起始像素以外,所有的像素都可以用8个像素方向来确定。轮廓跟踪是以链码的方向来进行的,上一个轮廓点将会影响到下一个跟踪点。这种方法能够加快像素扫描的速度,能够有效地提高跟踪效率。
链码的跟踪过程如下:(1)通过扫描得到初始轮廓点,将该点的坐标定位(x,y),进入步骤(2),如果扫描之后得不到轮廓点,那么进入步骤(4)。(2)按照链码的方向来扫描当前与相邻的8个区域,如果遇到轮廓点,用“-”设置停止扫描跟踪,并记录该店的链码值,转进步骤(3);如果扫描过程中没有遇到轮廓点,则设置结束跟踪标志,将扫描点重新设置到起始点(x,y)坐标上,转退步骤(1)。(3)用底色填充扫描轮廓点,将当前点设置为跟踪到的轮廓处,转退步骤(2)。(4)用“-”设置结束所有轮廓跟踪。
根据上述步骤,不仅可以算出链码序列,还能够求出链码序列中的坐标、方向,甚至能求出链码的具体值。为了区别链码序列中的不同轮廓,要使用特殊标志将它们分开。为了找出封闭轮廓的起始点,应先标出链码方向序列,将轮廓结束标志最后标出。在自闭式轮廓跟踪系统中,序列的记录工作是根据轮廓线条顺序进行的,这将大大方便后续轮廓处理工作。
通过链码的解密工作,可以求出链码表示的轮廓值,解码的过程和编码的过程相同。链码和像素之间存在一一对应关系,可以用数组的方法来解决解码问题。对于X坐标的数组,可以将它们设定为X[8],X[8]={1,1,0,-1,-1,-1,0,1}。对于Y坐标的数组,可以将它们设定为Y[8],Y[8]={0,1,1,1,0,-1,-1,-1)。通过处理这种链码序列,可以求出不同轮廓的坐标值。
3 图像轮廓提取效果分析
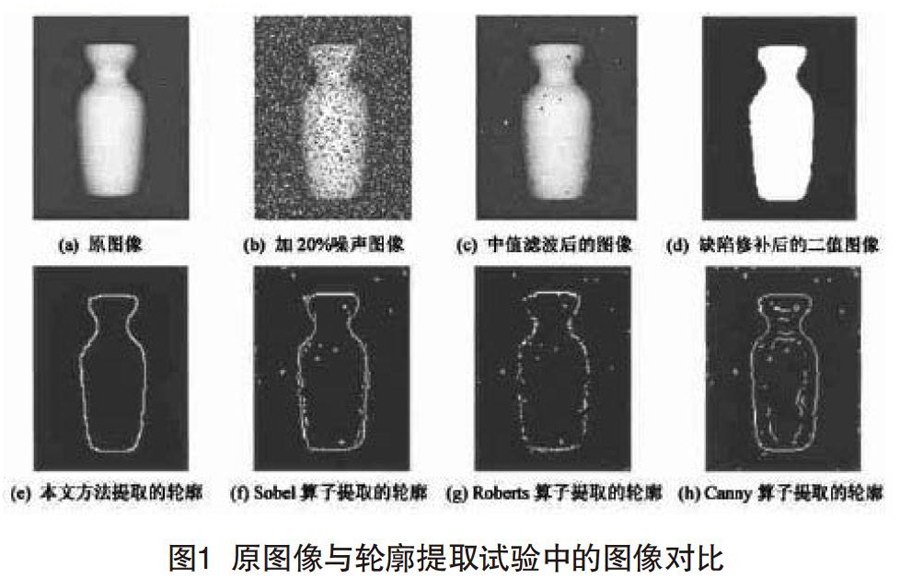
如果图像在没有受到干扰的情况下,就能够提取到较为清晰的轮廓。但是如果存在某种敏感性因素时,就会严重影响图像的轮廓提取效果。利用20%的椒盐噪声影响一个花瓶图像,在预处理环节对其滤波之后,会产生出图像5(c)。以这种图像为检验标准,对其进行轮廓提取试验。同时,也可以利用Sobel,Robets,Canny等算子对该图像进行边缘提取试验,将实验得出的结构图像,与轮廓提取试验中得到的图像相比较,可得到图1。
根据图1可以看到,Sobel算子、Robets算子、Canny算子在受到干扰的情况下,对图像轮廓的提取效果不是很好,会出现断线、噪声等问题。而采用本文方法的轮廓则能保持较高的清晰度,这种方法适用性强,无噪音,未来必将会得到广泛应用。
4 结语
随着我国计算机技术水平的不断提升,计算机视觉测量技术在我国工业上的应用越来越广泛。图像轮廓提取技术作为计算机视觉测量技术中的一个重要组成部分,对保障测量的精确度有着十分重要的作用。根据传统边缘检测技术中存在的局限性,本文提出了图像轮廓的提取技术。图像轮廓的提取技术,将利用数学形态学、链码跟踪技术,对二维图像进行修补,从而实现轮廓的提取。本文所研究的方法间断性小,准确率高,和传统的边缘检测相比,适用性更强,性能更加优良,未来必将会得到广泛的应用,从而推动我国计算机技术的迅速发展。
