气动教学机械手的开发与开放实验应用
唐德栋+韩天泉+张雪亮
[摘 要]根据机械手的控制要求,进行可编程序控制系统的输入/输出地址分配,利用顺序控制的方法实现控制系统的软件设计。分析设计气动教学机械手的结构及气压驱动系统。气动教学机械手的开发过程与开放实验项目结合,可以提高学生的独立科研能力,激发学生的创新潜能,为学生的创新、创业奠定坚实基础。
[关键词]机械手;可编程序控制;开放性实验;创新训练
[中图分类号] TP241.3 [文献标识码] A [文章编号] 2095-3437(2016)05-0146-02
现代工业技术中,随着液压与气压传动及机械手的迅速发展和广泛应用,各高校已经认识到其相关技术及人才培养的重要性和紧迫性。[1]气动教学机械手是机电一体化技术的典型代表产品,涉及机械设计及制造技术、可编程序控制技术、气压驱动技术、传感器技术等。本文设计了一种气动教学机械手,它作为机电一体化集成技术的教学载体,提供了一个开放、创新的综合教学平台,可以用于机械设计、机电一体化系统设计、机器人、气压传动等课程的理论教学演示及实验教学操作。[2]
一、机械手的结构方案设计
教学机械手设计为三个自由度,分别为腰部回转运动(周向),大臂伸缩运动(径向),小臂升降运动(轴向)。其具体结构如图1所示。
其中腰部的回转通过摆动气缸实现,手臂伸缩及手腕的升降通过直线气缸实现,直线气缸选用了多轴结构,保证了机械手的运动精度与刚度,并具有防扭转的效果,手爪的开合通过单独的气缸驱动。机械手采用了模块化的设计理念,各个模块独立于整体,每个气缸可以单独控制,互不干涉。
二、机械手的气压驱动系统设计
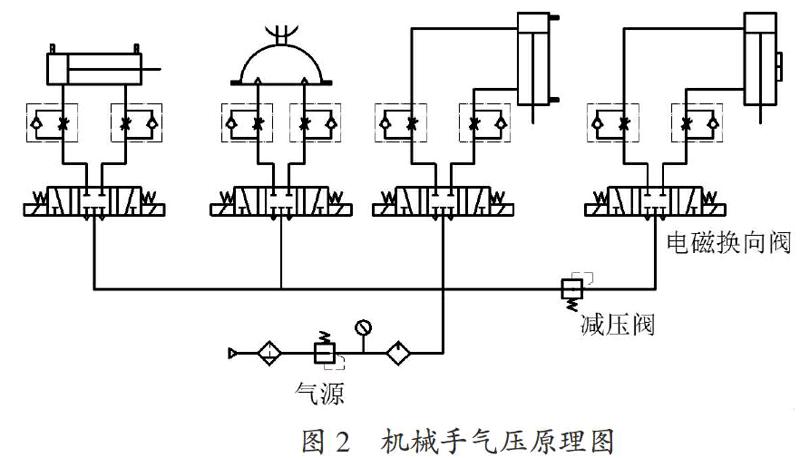
气压系统中方向控制阀可以通过改变阀芯位置,使气流流过不同的通道而改变气流运动方向。本文采用的方向控制阀为三位五通电磁换向阀,分别控制四个气缸的伸缩[3],实现机械手腰部、大臂、小臂及手爪的相应动作,每个气缸缸体安装两个磁性感应开关,用于检测气缸的极限位置。[4]由于手爪模块所需控制精度高,工作压力小,在该气缸的控制回路上安装了减压阀,确保手爪抓紧与松开的可靠性。为了保证机械手运动的平稳性,每个气缸的进出口均安装了单向节流阀,可实现气缸运动速度的连续调整。综上所述,气压系统回路如图2所示。
三、机械手的可编程控制系统设计
1.机械手的动作顺序
机械手将工件从A点搬运至B点,其具体的动作顺序为:机械手大臂伸出、小臂下降、手爪夹紧工件、腰部顺时针旋转90°、大臂缩回、手爪松开、小臂上升、腰部逆时针旋转90°回到原点位置。

2.输入/输出地址分配
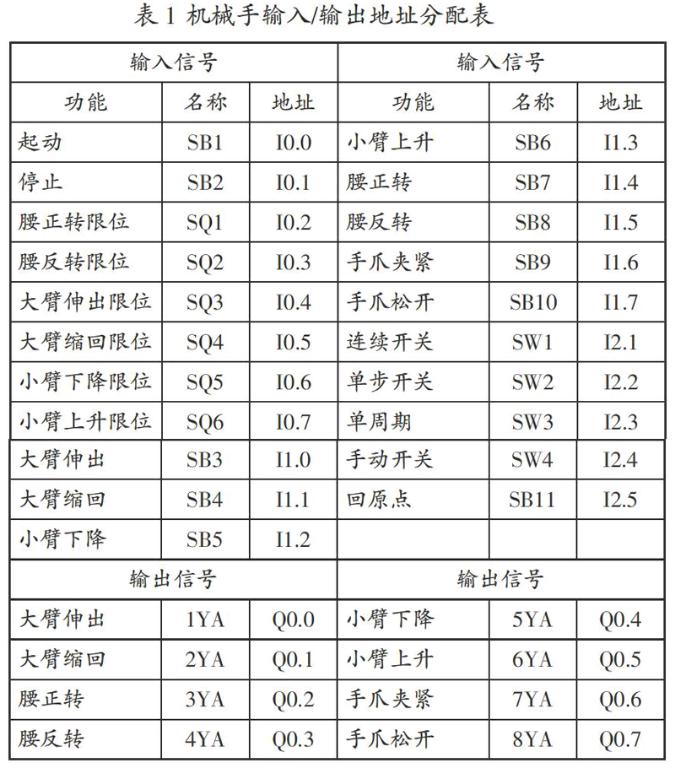
根据机械手输入输出量的特点及数量,控制系统采用西门子S7-200系列CPU226型可编程控制器。表1为机械手控制系统的输入/输出地址分配表。
三、控制系统软件设计
为了满足教学实验的需求,将气动机械手设置为多种工作方式,包括手动和自动工作方式。改变机械手的控制流程软件程序,可以方便快捷的改变机械手的动作顺序。可编程控制器的程序由1个主程序及4个子程序组成。四个子程序分别为公用程序、手动程序、回原点程序及自动程序。其中自动程序包含三种功能,单步动作、单周期动作、连续动作。[5]公用程序用于处理各种方式都要执行的任务,以及处理不同工作方式之间的转换。手动程序设计时,为了保证机械手的安全运行,需要设定一些必要的互锁,防止动作相反的两个输出同时接通。回原点程序是基于自动程序的顺序控制实现的,通过相应指令控制机械手自动回到原点处。执行单步运动时,运动过程及动作与连续运动相同,每按下一次起动按钮,执行一步活动后停止。执行单周期运动时,程序执行完一个完整周期后便停止。单周期动作与连续动作通过连续标志位进行区别,控制连续标志位的梯形图程序采用起保停电路。通过转换允许标志位实现单步功能,其控制电路由起动按钮与正跳变触点指令串联而成,在自动程序的梯形图中,每步起动电路中均串联转换允许标志位的常开触点,可实现机械手的单步控制。
四、开放实验教学的实践与效果
结合气动机械手的开发进行了开放性的实验教学,学生参与实验之前,需要掌握机械设计、气压系统设计、可编程控制器原理等相关的技术基础课。将参与实验的学生分成三个小组,分别为机械设计调试组、气压系统设计组、控制系统设计组。机械设计调试组主要完成机械手标准件的选型及购买,非标件的设计及加工,所有零部件齐备后,进行装配及调试。气压系统设计组主要完成机械手所有执行元件的驱动系统设计,并根据设计的气压系统原理图选择相应的气压元件进行搭接及调试。控制系统设计组主要完成机械手可编程控制器输入/输出地址的正确分配,利用顺序控制的设计方法编制合理的控制程序,软件仿真验证合理后,下载至可编程序控制器中,正确连接可编程控制器的外部接线,进行控制系统的调试。各组可根据教师布置的任务,分别独立完成自己负责部分工作的设计、仿真、调试等工作。三个小组调试成功后,由实验项目的总负责人,协调所有学生完成机械手的机、电、气系统的综合调试工作。开放实验的过程中,学生们遇到了很多实际的问题,比如机械设计调试组,一开始选择的气缸型号市场上很难买到,根据工况重新选择了常用的型号;设计的手爪与小臂气缸的连接板实际装配时出现了干涉的错误,需重新进行修改;机械手驱动系统连接成功后,发现机械手运动过程中冲击较大,气压系统设计组与控制系统设计组联合调试,最终实现了机械手的平稳运动。三个小组的学生既有分工又有合作,在确定方案、详细设计、实验调试的过程中,锻炼了缜密思维、协同创新、团队合作的科研攻关能力。开发的机械手现主要用于机械、机电等专业的理论及实验教学。机械手结构简单,控制系统可靠,动作方式多样,操作及调试方便。通过该装置的开发、调试及演示,学生们对机电一体化系统设计、机器人基础、机电传动控制、液压与气压传动、可编程序控制器等课程的理解可以更加直观及深入,大大提高了专业课程的教学效果和学生的动手及创新能力。
[ 注 释 ]
[1] 王翠艳,吴文江,高占凤,等.机电一体化创新教育探索与实践[J].中国电力教育,2010(4):154-155.
[2] 张燕,史留勇,刘世豪.基于社会需求的机电一体化专业实验教学改革[J].中国电力教育,2014(29):75-76.
[3] 左健民.液压与气压传动[M].北京:机械工业出版社,2013.
[4] 唐德栋.基于Festo实验台气动综合实验的开发[J].机床与液压,2006(4):109-110.
[5] 廖常初.PLC编程及应用[M].北京:机械工业出版社,2014.
[责任编辑:钟 岚]
[摘 要]根据机械手的控制要求,进行可编程序控制系统的输入/输出地址分配,利用顺序控制的方法实现控制系统的软件设计。分析设计气动教学机械手的结构及气压驱动系统。气动教学机械手的开发过程与开放实验项目结合,可以提高学生的独立科研能力,激发学生的创新潜能,为学生的创新、创业奠定坚实基础。
[关键词]机械手;可编程序控制;开放性实验;创新训练
[中图分类号] TP241.3 [文献标识码] A [文章编号] 2095-3437(2016)05-0146-02
现代工业技术中,随着液压与气压传动及机械手的迅速发展和广泛应用,各高校已经认识到其相关技术及人才培养的重要性和紧迫性。[1]气动教学机械手是机电一体化技术的典型代表产品,涉及机械设计及制造技术、可编程序控制技术、气压驱动技术、传感器技术等。本文设计了一种气动教学机械手,它作为机电一体化集成技术的教学载体,提供了一个开放、创新的综合教学平台,可以用于机械设计、机电一体化系统设计、机器人、气压传动等课程的理论教学演示及实验教学操作。[2]
一、机械手的结构方案设计
教学机械手设计为三个自由度,分别为腰部回转运动(周向),大臂伸缩运动(径向),小臂升降运动(轴向)。其具体结构如图1所示。
其中腰部的回转通过摆动气缸实现,手臂伸缩及手腕的升降通过直线气缸实现,直线气缸选用了多轴结构,保证了机械手的运动精度与刚度,并具有防扭转的效果,手爪的开合通过单独的气缸驱动。机械手采用了模块化的设计理念,各个模块独立于整体,每个气缸可以单独控制,互不干涉。
二、机械手的气压驱动系统设计
气压系统中方向控制阀可以通过改变阀芯位置,使气流流过不同的通道而改变气流运动方向。本文采用的方向控制阀为三位五通电磁换向阀,分别控制四个气缸的伸缩[3],实现机械手腰部、大臂、小臂及手爪的相应动作,每个气缸缸体安装两个磁性感应开关,用于检测气缸的极限位置。[4]由于手爪模块所需控制精度高,工作压力小,在该气缸的控制回路上安装了减压阀,确保手爪抓紧与松开的可靠性。为了保证机械手运动的平稳性,每个气缸的进出口均安装了单向节流阀,可实现气缸运动速度的连续调整。综上所述,气压系统回路如图2所示。
三、机械手的可编程控制系统设计
1.机械手的动作顺序
机械手将工件从A点搬运至B点,其具体的动作顺序为:机械手大臂伸出、小臂下降、手爪夹紧工件、腰部顺时针旋转90°、大臂缩回、手爪松开、小臂上升、腰部逆时针旋转90°回到原点位置。
2.输入/输出地址分配
根据机械手输入输出量的特点及数量,控制系统采用西门子S7-200系列CPU226型可编程控制器。表1为机械手控制系统的输入/输出地址分配表。
三、控制系统软件设计
为了满足教学实验的需求,将气动机械手设置为多种工作方式,包括手动和自动工作方式。改变机械手的控制流程软件程序,可以方便快捷的改变机械手的动作顺序。可编程控制器的程序由1个主程序及4个子程序组成。四个子程序分别为公用程序、手动程序、回原点程序及自动程序。其中自动程序包含三种功能,单步动作、单周期动作、连续动作。[5]公用程序用于处理各种方式都要执行的任务,以及处理不同工作方式之间的转换。手动程序设计时,为了保证机械手的安全运行,需要设定一些必要的互锁,防止动作相反的两个输出同时接通。回原点程序是基于自动程序的顺序控制实现的,通过相应指令控制机械手自动回到原点处。执行单步运动时,运动过程及动作与连续运动相同,每按下一次起动按钮,执行一步活动后停止。执行单周期运动时,程序执行完一个完整周期后便停止。单周期动作与连续动作通过连续标志位进行区别,控制连续标志位的梯形图程序采用起保停电路。通过转换允许标志位实现单步功能,其控制电路由起动按钮与正跳变触点指令串联而成,在自动程序的梯形图中,每步起动电路中均串联转换允许标志位的常开触点,可实现机械手的单步控制。
四、开放实验教学的实践与效果
结合气动机械手的开发进行了开放性的实验教学,学生参与实验之前,需要掌握机械设计、气压系统设计、可编程控制器原理等相关的技术基础课。将参与实验的学生分成三个小组,分别为机械设计调试组、气压系统设计组、控制系统设计组。机械设计调试组主要完成机械手标准件的选型及购买,非标件的设计及加工,所有零部件齐备后,进行装配及调试。气压系统设计组主要完成机械手所有执行元件的驱动系统设计,并根据设计的气压系统原理图选择相应的气压元件进行搭接及调试。控制系统设计组主要完成机械手可编程控制器输入/输出地址的正确分配,利用顺序控制的设计方法编制合理的控制程序,软件仿真验证合理后,下载至可编程序控制器中,正确连接可编程控制器的外部接线,进行控制系统的调试。各组可根据教师布置的任务,分别独立完成自己负责部分工作的设计、仿真、调试等工作。三个小组调试成功后,由实验项目的总负责人,协调所有学生完成机械手的机、电、气系统的综合调试工作。开放实验的过程中,学生们遇到了很多实际的问题,比如机械设计调试组,一开始选择的气缸型号市场上很难买到,根据工况重新选择了常用的型号;设计的手爪与小臂气缸的连接板实际装配时出现了干涉的错误,需重新进行修改;机械手驱动系统连接成功后,发现机械手运动过程中冲击较大,气压系统设计组与控制系统设计组联合调试,最终实现了机械手的平稳运动。三个小组的学生既有分工又有合作,在确定方案、详细设计、实验调试的过程中,锻炼了缜密思维、协同创新、团队合作的科研攻关能力。开发的机械手现主要用于机械、机电等专业的理论及实验教学。机械手结构简单,控制系统可靠,动作方式多样,操作及调试方便。通过该装置的开发、调试及演示,学生们对机电一体化系统设计、机器人基础、机电传动控制、液压与气压传动、可编程序控制器等课程的理解可以更加直观及深入,大大提高了专业课程的教学效果和学生的动手及创新能力。
[ 注 释 ]
[1] 王翠艳,吴文江,高占凤,等.机电一体化创新教育探索与实践[J].中国电力教育,2010(4):154-155.
[2] 张燕,史留勇,刘世豪.基于社会需求的机电一体化专业实验教学改革[J].中国电力教育,2014(29):75-76.
[3] 左健民.液压与气压传动[M].北京:机械工业出版社,2013.
[4] 唐德栋.基于Festo实验台气动综合实验的开发[J].机床与液压,2006(4):109-110.
[5] 廖常初.PLC编程及应用[M].北京:机械工业出版社,2014.
[责任编辑:钟 岚]
