基于WIFI技术的搜救小车的设计
陆晏忆 宋林桂


摘要:为了在灾难现场等复杂环境下进行生命迹象、视频图像数据、环境参数等现场环境的实时监测,文章设计一种基于WIFI技术的搜救小车。Windows监控端通过RT5350路由器与STC12C5A60S2单片机通信,发出控制信号给直流马达控制器,实现小车行动控制。热释电模块、摄像头模块、温度传感器模块、烟雾传感器模块进行生命迹象、视频图像数据、温度数据、有害气体数据等现场环境信息的采集,并实时回传给windows监控端并显示。
关键词:WIFI;实时监测;搜救小车;视频显示
世界各地每时每刻都有无数自然或人为灾害出现,灾后最紧要的事情就是搜救那些被困在残骸中的幸存者。然而,错综复杂、情况不定的灾害现场给救援人员及幸存者带来巨大的威胁,因此实时的现场环境信息的检测与反馈是实施及时、有效救援的关键。鉴于此,本文设计并制作基于WlFI技术的搜救小车。
1系统总体设计
系统下位机通过STC12C5A60S2微控制器和各个传感器监测危险环境里的环境信息(环境温度、有害气体、有无生命迹象等信息);系统下位机通过RT5350模块将检测到的环境信息发送给上位机。RT5350模块刷上OpenWrt系统后通过WIFI把图像和环境参数发送给上位机。Windows电脑终端装有上位机软件来实时显示RT5350模块发送过来的图像和环境参数,并且可以通过上位机的方向按钮来控制小车的运动方向。系统上位机软件使用跨平台开发软件QT编写,上位机软件编写主要使用QTcpSocket类编程。图1为该设计系统的总体框图。
2下位机设计
2.1微控制器介绍
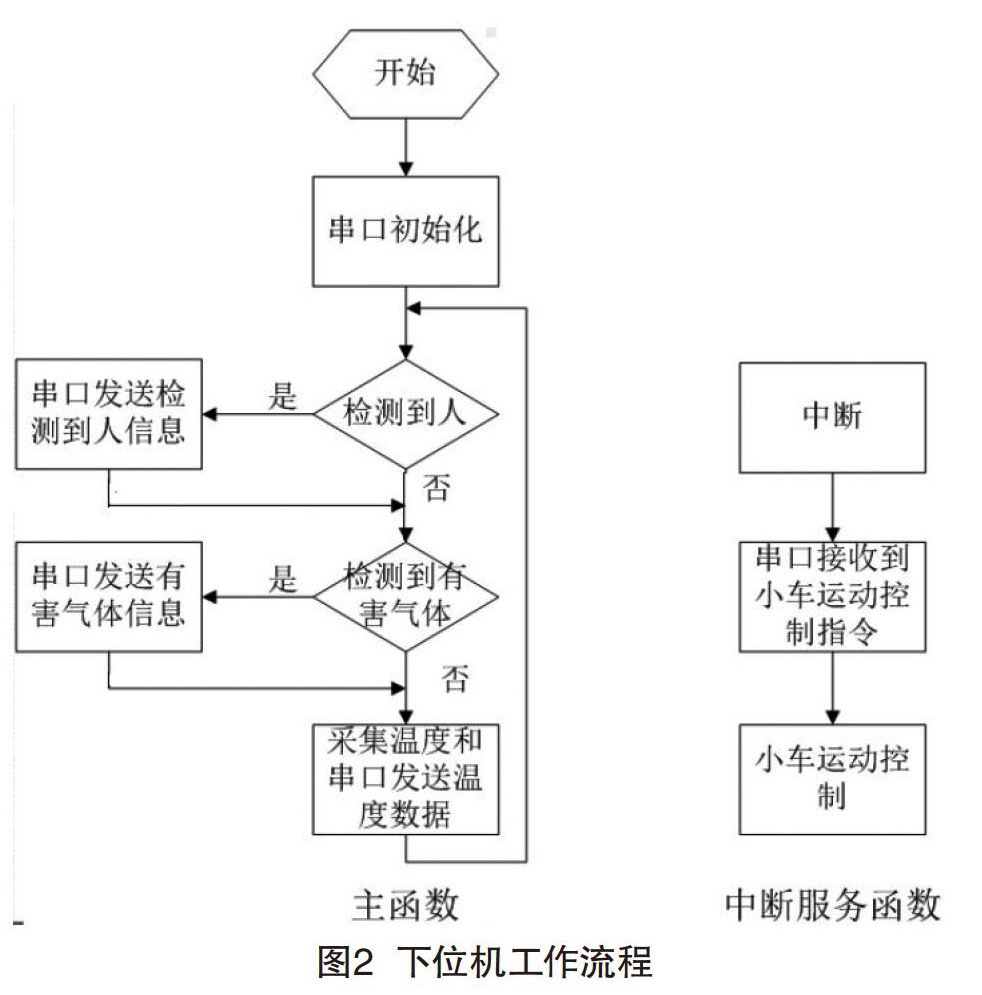
STCl2C5A60S2单片机是STC生产的单机器周期(1T)的单片机,是高速、低功耗、超强抗干扰的8051单片机,指令代码完全兼容传统8051,速度快12倍,内部含有专用复位电路,2路PWM,适用强干扰场合。运用该单片机完成对搜救小车各检测模块、直流马达驱动电路和上下机信息交互模块的总控制。图2为下位机工作流程。
2.2热释电模块介绍
热释电传感器是一种新型的敏感元件,它以非接触式检测人体发出的红外辐射,将其转化成电信号输出,该热释电模块是由BISS0001、热释电传感器和少量外接电子元件构成的被动式红外开关组成。当检测到生命迹象时热释电模块输出高电平,没有检测时输出低电平,模块输出信号经过三极管构成反相器取反后送给单片机。
2.3温度传感器模块介绍
温度传感器采用美信半导体的DS18820,该传感器具有体积小、价格低、抗干扰能力强、精度高、电路简单的特点。该传感器是数字传感器,使用单总线方式与单片机通信。
2.4有害气体检测电路模块介绍
该电路采用的M02气体传感器,该传感器具有高灵敏度、广泛的探测范围、简单的驱动电路、优异的稳定性等特点,该传感器可以用于液化气、丁烷、丙烷、甲烷、酒精、氢气、烟雾等的探测。该传感器有6个引脚,2个引脚用于为传感器内部的加热器提供电流,加热器为气敏元件提供必要的工作环境,4个引脚用于信号取出,信号取出后经过1个电压比较器电路输出数字信号给单片机,当检测到以上有害气体时电压比较器输出低电平,没有检测到有害气体时输出高电平。
2.5直流马达驱动电路介绍
小车的直流电机使用电流相对较小的130马达,驱动芯片选用L9110S。本设计运用L9110驱动芯片两通道推挽式功率放大专用集成电路器件,将分立电路集成在单片IC中,从而降低外围器件成本,提高整机的可靠性。2个输出端具有较大的电流驱动能力,每通道能通过750~800mA的持续电流,峰值电流能力可达1.5~2.0A,能直接驱动电机的正反向运动及停止。
2.6 RT5 350模块工作原理介绍
本设计采用RT5350模块作为环境信息传输模块。RT5350模块带有WIFI功能,在无遮挡的情况下有效WIFI传输距离为100M,能够满足近距离的数据传输,如需增大传输距离需增加外置大功率天线。将OpenWrt系统刷在RT5350模块中并安装Ser2net软件和MJPG-streamer软件。Ser2net软件实现串口数据和网络数据互相转换,MJPG-streamer软件将USB摄像头采集的视频通过网络传输到上位机实现视频监控。
3上位机工作原理介绍
本系统的上位机是由可以在多种操作系统下运行的QT软件编写,用QT编写的软件也可以在多种操作系统下运行,比如:Windows,Linux,Android等系统。QT软件带有UI设计软件,利于界面设计实现,QT把网络编程有关的函数和数据结构封装成各种类,使得程序的开发更加简洁和高效,所以本系统的上位机选用QT软件来编写。下位机和上位机通信采用TCP协议,本系统中上位机使用QTcpSocket类编程,本系统的环境数据和小车运动的控制指令通过Socket通信传输完成,Socket通信即是给固定的IP地址设备的固定的软件端口传输数据,Socket通信指明了数据传输的路径。本系统的路由器的IP地址是192.168.1.100,Ser2net软件的端口号是2001;上位机首先使用connectToHost()函数与服务器RT5350模块连接,连接成功后就可以根据需要发送和接收数据。发送数据可以使用write()函数,这种函数有3种重载形式,系统使用write(const char*data)函数,当QT界面的按钮组件发生按动时触发小车运动控制槽函数发出小车运动控制指令。当QTcpSocket收到新的数据时,readyRead()信号就会被触发,将该信号与接受传感器数据处理函数相连,收到传感器数据后上位机提取并显示,同时上位机每0.04s刷新一次从下位机RT5350传送来的图片,实现视频显示。
4系统测试
为了验证系统能够正常工作,通过上位机调试软件接收WIFI发过来的环境信息和视频并且控制小车的运动方向。图3为上位机软件调试结果,这说明下位机和上位机可以正常工作。
5结语
基于WIFI的实时视频同传的探测小车是一个集单片机、无线路由器、摄像头、QT等各种软硬件于一体的智能化搜救小车系统。该设计通过上位机完成小车行动控制,采集热影像、温度、实时视频等周围信息和数据回传,其软硬件设计简洁,开发成本低。同时学生对该设计会感兴趣,既有单片机程序设计又有上位机软件设计,适合物联网应用技术专业的学生做综合课程设计。
