遍历查找中的计算思维
陈凯

机器人小睿身处一个洞穴迷宫中,迷宫中有许多空间,各个空间之间有道路相连。小睿的任务是搜集可能存在于各个空间中的能量石,并且不能有所遗漏。然而,小睿一旦出发,就必须按既定的命令以规定好的路径运行,不能临时改变方向。为了简化问题,假设迷宫中不存在回路(就是兜了一圈回到原地的路径),并且,从最开始的洞穴空间出发,只有左和右两条道路可选择,进到新的洞穴空间后,也一样只有左右两条道路可选(包含来时的道路,每个洞穴空间最多有三个方向可以走)。作为小睿的主人,应该怎样给小睿下达指令,才能比较有效地搜索整个迷宫呢?
这其实就是一个树结构的遍历问题,仔细想想,小睿的主人恐怕不是那么容易当的。一方面,他要想办法做到多快好省全,使机器人既不能错过某条路,也要尽量减少重走已探索過路径的情况;另一方面,他还要考虑如何将自己的要求编码成某种指令,用尽可能简洁明确的方式传达给机器人小睿。
或许有相当多的读者知道,可以用广度优先搜索或深度优先搜索算法来完成上述任务,但对于人工智能相关内容的初学者来说,他所面对的知识和技能的网络,可能也和迷宫一样复杂。比如说,他要知道“树”或者“图”的数据结构;为了跟踪机器人的行踪,还要知道“堆栈”或者“队列”的用法;为了将迷宫呈现出来,可能需要高维的数组或列表;为了能够让机器人自动探索路径,需要用到循环或递归;并且,更重要的是,他要能将上述所有知识和技能综合在一起,把机器人探路的程序编写出来。
然而,正如大家已经认识到的,计算思维的培养与程序算法的培养,两者间虽然有联系,但并不等同。在计算思维培养过程中,常常要关注如何对问题进行编码,如何找出形式化的方法,使得问题的解决变得自动化,最后,才是将此自动化过程用算法实现出来。而在传统的算法学习中,学习者往往是直接面对已经相当成熟的、高效的问题解决方案。所以,在计算思维培养过程的初始,就要玩一种“假装不知道”的游戏,把那些成熟的算法和程序代码搁在一旁不去看它,试着自主探索某些形式化、自动化的方案,哪怕学习者的算法和程序水平有限,也不妨碍他们自主开展探索并逐渐形成别具一格的方案。
以树结构的遍历查找为例,如何在正式推出成熟算法和程序代码之前,先行开展自主探索活动,落实提高计算思维的教学目标呢?不妨来看看下面这个涂涂画画的例子吧。
● 首先来玩画画
第一个任务是画画,用图画模拟出洞穴迷宫的环境,用画图软件就可以了,如图1所示。这个任务,其实和后续指引机器人如何行动的指令编码有关,它需要学习者对头脑想象中的环境进行抽象,将不同空间之间的关系,尽可能用简洁明了的方式呈现出来。
至于怎么在画图软件中模拟迷宫环境,办法很多,比如,画矩形当作洞穴,在画面正中间画一个矩形,然后在它左右两边各画一个矩形与中间的矩形边缘相接,由此逐渐扩展。可以看出,这实际上就是一个二叉树的结构,在对它的结构有了充分的了解之后,还可以拓展研究有更多分岔路径的结构。绘图的时候,可以有意将新接进来的矩形的左右方位设置得很明显,这是为了在后续遍历时更容易描述机器人的行进动作。
● 然后来涂颜色
第二个任务,是试着依靠颜色指引机器人如何行进。想象一下,机器人一旦从初始空间出发,就需要根据实时情况的变化,保存或变更一些信息,其后才能根据这些信息指引自己在迷宫中继续行动。本文游戏中,用五彩斑斓的颜色,来直观地展现信息的存储和变化过程。
例如,这里有一个非常简单的方案:将搜索的空间分出不同的层级,探索的第一层就是最中间的空间,也就是机器人初始所在的位置,第二层是邻近第一层空间的左侧和右侧的空间,第三层,是左侧空间的左侧空间,左侧空间的右侧空间,右侧空间的左侧空间,右侧空间的右侧空间,以此类推。
考虑如下方案A。由于空间总共有四层,所以它将用到红绿蓝黄四种颜色,若加上原本的白色,就是五种颜色,四种颜色放置在调色盘中,如果迷宫层级增加,调色盘也可相应扩充:①将正中间的空间涂成红色。②搜索所有和红色邻近的空间,涂成绿色。③搜索所有和绿色邻近的空间,涂成蓝色。④搜索所有和蓝色邻近的空间,涂成黄色。每一层涂色完毕后,就可以将调色盘最上层的颜色擦除,这样,机器人就知道下一层应该涂什么样的颜色了。
按这样的规则,可以很快将所有空间遍历完成。方案A虽然简单,但若是仔细思考一下,便会发觉有很大的漏洞,因为,这其实是要求,机器人小睿必须具有重复分身的能力,每进入一个新的空间,它就在这个空间一分为二,然后二者各自去探索左右两个路径。这样的机器人,恐怕是比较难以制造出来的。
接着,考虑如下方案B。在这个方案中,除了原本的白色,就只用到红色:①机器人由低层向高层行进,若行进到无法行进时(不再有更高层),则原路返回到最初始的空间,返回时不进行新的探测任务。②当第一层空间(也就是最初始的空间)遇到机器人第四次返回时,则变成红色。③当第二层空间(有两个空间)遇到机器人第二次返回时,则变成红色。④当第三层空间(有四个空间)遇到机器人第一次返回时,则变成红色。⑤若当前空间为白色,则探索左侧空间,否则,探索右侧空间。
这个方案也可以遍历所有空间,不过,它的规则的描述比较麻烦,除了标注颜色,还需要额外的计数器来计算机器人返回了几次,当然,这个计数器也是可以用颜色变化来实现的,但如此一来,问题解决的复杂性就大大增加了。另一个问题是,每次机器人将一条路径走到底后,就必须返回“老巢”,无法在回程时顺便探索一下其他路径,所以效率不高。另外,若是从某个空间分岔的路径多于两条,也很难基于此方案进行扩充修改。
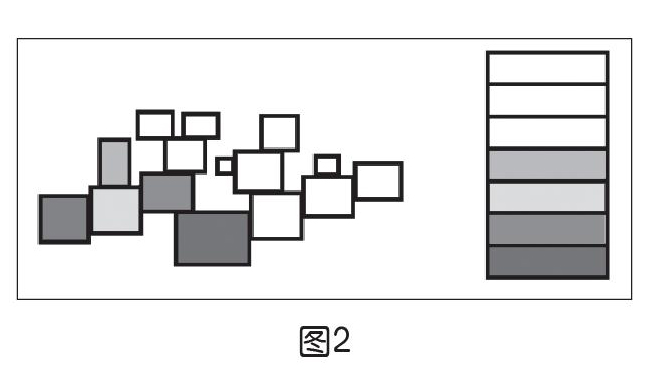
考虑如下方案C。该方案使用到十五种颜色,包含白色就是十六种,实际上,就是准备好足够多的颜色,给每个空间做一个标识。这个方案也用到了调色盘,如果层级增加,调色盘也可相应扩充:①任取一种颜色将正中间的空间涂色,然后将选取的颜色填在右侧调色盘最下一格。②任取一种颜色,对刚才所涂颜色的空间的后一层左侧空间涂色,然后将选取的颜色填在右侧调色盘中先前填色格子的上一个格子中,进入该空间,然后再执行步骤2;如不再能找到未调色的后一层左侧空间,则找到未调色的后一层右侧空间,将选取的颜色填在右侧调色盘中先前填色格子的上一个格子中,进入该空间,然后执行步骤2;若未找到后一层左侧和右侧空间,则擦除调色盘最上一层颜色(填入白色即可),然后执行步骤3。③按调色盘最上一层颜色的指示,回到当前空间的前一层空间,然后执行步骤2。
在操作过程中需要注意的是,每次擦除颜色,都只是擦除调色盘上的颜色,而不是擦除迷宫空间里的颜色。
图2是整个方案实施中的某一步。
在整个过程中,调色盘其实起到了堆栈的作用,而机器人行走的路径,则模拟了深度优先搜索的整个过程,规则指令运行起来颇为波折,但跟踪过程也很有趣味。此方案的优点是,如果遇到有更多条路径分岔的情况,也很容易修改规则来完成探路游戲。大家若有兴趣,还可以把迷宫做成棋盘,把规则指令做成积木块,把积木块打乱之后,思考怎么重新排列积木块,来指挥机器人完成迷宫探索任务。
除了上面提到的方案A、B、C,其实还有更多方案,比如,也可以不依赖调色盘来完成探路任务,这就需要用到递归,或是用并行自动机的方法,限于篇幅这里不再一一描述,给读者留一些探索空间。
● 接着来猜字谜
重新考察方案B,如果将机器人行进方向分为L和R(前进时总是往后一层,返回时总是往前一层),则可以看出,探索第二层空间时,机器人执行的是LRRL,探索第三层空间时,机器人执行的是LLRRLRRLRLLRRRLL,到了第四层的时候,全部的指令要是写出来的话就比较长了:LLLRRRLLRRLLLRLRLRLRRRLLRLLLRRRLRLRLRRLLLRRRRLLL。
其实,探索第二层空间的指令,和探索第三层、第四层空间的指令,是存在着演变变化规律的,怎么找出规律呢?
由于返回的路径总是与前进路径方向相反,所以不妨简写为“B”,于是上述指令字符串就变成了这样:LLLBLLRBLRLBLRRBRLLBRLRBRRLBRRRB。
可以看出,方案B的指令字符串的演变,其实和二进制计数器完全一致,这也说明了,为什么可以用二进制数来对二叉树的节点进行标注。
接着,再重新考察方案C,也将机器人行进方向分为L和R(这里暂时先不考虑到底是往前一层还是后一层),假如整个迷宫只有第一层和第二层空间的话,则机器人的行进方向就是LRRL,若是有三层空间,则机器人的行进方向是LLRRLRRLRRLL,如果是探索四层空间的话,行进方向的指令写出来后也比较长,不过比起方案B的指令字符串要短一些:LLLRRLRRLRRLLRRLLRRL
RRLRRLLL。
对于不同层级的迷宫,机器人探索路径的行动方向也是有规律可寻的,这个规律和一种常用的自动化过程——迭代有着密切的关系,并且,在一系列的迭代之后,实际上起到了分形的效果。方案C的指令字符串的演变规律如下:①初始字符串为LxRRxL。②将字符串中的x替换为LxRRxL,反复此过程。
但方案C与方案B不同,它还需要更多地考虑机器人在什么时候前进一层,什么时候后退一层,如果将机器人前进和后退的方向标为“U”和“D”,就形成了新的指令字符串,可以将“U--D”字符串和“L--R”字符串结合使用,来指引机器人行进,大家能看出“U--D”指令字符串中的规律吗?
两层迷宫:UDDU
三层迷宫:UUDUDDUUDU
DD
四层迷宫:UUUDUDDUUD
UDDDUUUDUDDUUDUDDD
本期参考答案:设初始状态为UxDUxD,然后执行将x替换为“UxDUxD”的动作,反复进行迭代即可。
对此期主题有任何好主意和建议,请发送稿件至[email protected](专栏作者)或[email protected](杂志社)。
