新工科背景下移动机器人项目实验教学的探索
邝禹聪

摘 要:在新工科背景下,使用移动机器人模拟工业AGV的实际应用,以此开展实验教学。从实验资源的配置、实验内容的设计、实验考核三方面,描述了实验课程的情况,并实现了教学实践,达成了初步的教学效果。
关键词:实验教学;新工科;移动机器人
中图分类号:G642.0 文献标识码:A
Abstract:Under the background of Emerging Engineering Education,using mobile robot to simulate the practical application of industrial AGV,in order to carry out experimental teaching.This paper describes the situation of the experimental course from three aspects:the allocation of experimental resources,the design of experimental contents and the examination of experiments,and realizes the teaching practice,achieves the preliminary teaching effect.
Key words:experiment teaching;new engineering;mobile robot
1 新工科背景下的课程要求
2017年,教育部提出了新工科的建设愿景[1],钟登华院士、郑庆华教授均对建设新工科的内涵进行了解析,并就“如何建设新工科”提出了见解[2][3]。新工科的建设,对机电专业的课程提出了新的要求:(1)培养多元化的创新型人才。(2)积极面对与适应时代的科技变化。(3)多学科融合。面对这样新的挑战,学校机械工程学院的工业自动化强化训练课程做出新的设计,新增移动机器人实验项目。为适应社会的科技发展,针对物流行业里的AGV(Automated Guided Vehicle)的应用情况,以及分析了AGV行业的人才需求,将AGV的应用场景引入到移动机器人项目的实验教学中。
结合新工科的建设背景,对移动机器人实验课程的要求是:实验课程能应对时代的发展,能体现实际的工程需求,实验平台能够锻炼工程能力,训练学生多元思考,培养创新思维,人才培养注重过程,并在考核上体现出来。
以下将从实验资源的配置、实验课程的设计以及课程考核方式这几方面,对实验教学进行探索。
2 实验资源的配置
围绕课程的建设,搭建实验资源,包括实验平台、实验教学使用的指导书、实验用到模块的产品用户手册、以及实验过程中用于实验记录以及实验评价的能力考核手册。
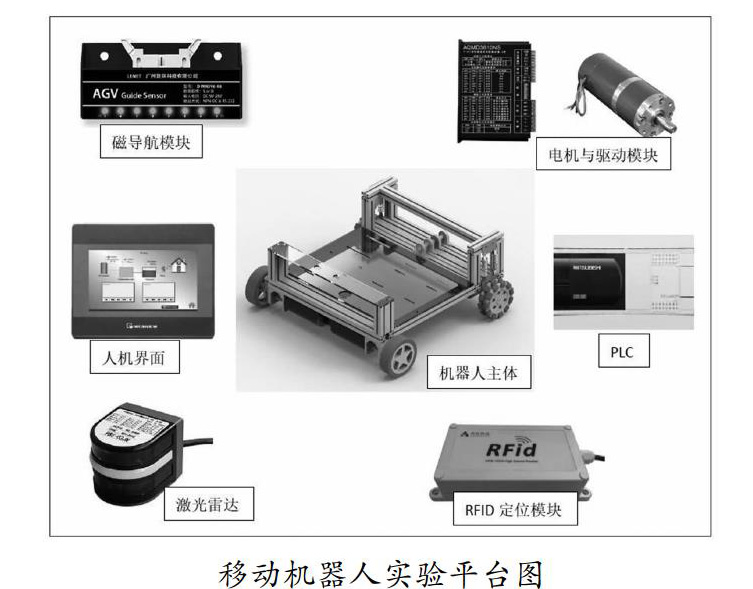
移动机器人实验平台的主体由铝型材搭建而成,组装灵活,方便安装各个模块,也为后续的机构改进、创新设计留下空间。在对AGV的企业进行了工程应用的调研后,为移动机器人设计的主要功能定位为一台磁导航的点到点搬运机器人,能实现手动模式与自动模式的切换。机器人的功能模块参考了实际的工程应用,主要分为PLC与人机界面控制模块、RFID定位模块、激光雷达避障模块、磁导航模块、电机与驱动动力模块。移动机器人主体以及功能模块如下图所示。实验平台根据实验内容,可以整体调试,也可以单独使用模块调试。
移动机器人实验平台图围绕上述的实验平台,开发了实验指导书,实验的实施由下节叙述。模块中使用到的工业产品,由学生直接查阅相关的用户手册,锻炼工程师阅读手册的能力。最后,能力考核手册由学生进行实验记录,收集数据,指导老师在其上进行实验评定。
3 实验项目的设计与考核
3.1 实验实施
在3周的教学时间内,共需要完成一次设备认知讲授、十一个实验、两个综合任务,如下表所示。其中,实验零为设备认知,由指导老师负责进行讲授,全面讲解整体设备、分模块介绍,以及下发实验资源。学生负责对实验平台进行全面认知,了解实验平台的使用。十一个实验由学生自主完成,主要对实验平台的每个功能模块进行控制、操作。实验过程中可以自学、小组讨论、与指导老师探讨,形式多样。两个综合任务由学生对整车进行调试,是对每个模块的综合应用。学生在实验过程中,直接在能力考核手册中记录实验过程,留下实验数据。实验课程结束后,应提交实验报告书一份。
3.2 考核方式
对于学生的考核,分为课堂评定与任务验收两种。
(1)课堂评定,即对要求完成的实验,指导老师做出完成情况的评定,指出完成不好的地方以及需要改进的地方,并在学生的能力考核手册上进行批注。以实验二为例,要求学生掌握触摸屏设计软件的操作,完成一个基本的控制界面。实验评定时,指导老师对界面细节作出改进意见,对未完成的界面作出批注。这样,学生可以根据指导老师的意见,进行完善,即学生有继续完成该实验的机会。在接下来的整个课程中,指导老师可以根据此次实验课堂评定的批注,关注学生是否有对该问题进行了学习,是否有进步。
(2)任务验收,即对要求完成的综合任务,进行工程甲乙方式的验收。学生的角色类似乙方工程师,指导老师类似甲方客户。任务验收时,由乙方对完成的任务进行讲解,按照任务的性能指标,逐项向甲方进行展示汇报。汇报过程中,甲方可以随时提出自己的问题,乙方需要一一解答。汇报结束后,由甲方给出验收意见。
以上两种评定,均由指导老师将意见记录在能力考核手册中。学生在完成课程后,需要撰写实验报告,记录整个实验过程。学生的课程成绩,最后根据能力考核手册以及实验报告书综合给出。
4 课程创新与展望
围绕新工科理念建设移动机器人项目实验课程,该课程在机械学院2016级的课堂上进行了教学实践,效果理想。课程实现了以下创新:
(1)实验平台贴合工程实际,模拟了AGV的实际应用,直接使用工程中使用的激光避障传感器等元件,能夠让学生直接体验科技在当前工业中的应用,缩短了“实验室”到“工程现场”的差距。
(2)实验内容分等级进行,分为认知、应用、设计以及综合,层层推进,逐步学习,符合学习的规律。根据不同的实验等级,对应的实验方式、实验平台也会相应调整。
(3)实验的方式先模块后整体,在此过程中,能体会到工程师研发、设计、制造的过程,培养学生多元思维。模块应用相当于工程师研发过程,熟悉每个工业产品元件的使用情况。然后是设计,将各元件综合起来,设计出一个完整的AGV产品,并且自行完成整车的电气搭建,熟悉了产品的制造过程。
(4)课程考核注重课堂评测,关注学生平时的积累与成长。对于学生的成绩,不再是以最后的大作业去评价。而综合任务的考核,则让学生从整个项目的角度去思考问题,并且需要通过个人的表达能力,去展现自己的产品。
展望未来,课程还有提高的方向,提出以下两点:
(1)可以结合人工智能,实现学科交叉融合。当今科技的发展,人工智能是一个热门方向。人工智能+机器人,更是工业自动化领域里面,很有应用前景的学科融合。例如,结合机器学习,实现移动机器人的路径自主规划,增加行走路径精度等。
(2)增加实验内容,对移动机器人进行结构创新设计。在实验等级中,新增创新设计,使用三维设计软件,对AGV的机构,提出自己的构想,新增牵引式、背驮式、潜伏式等AGV类型所必须的机构。例如,牵引式的AGV需要设计一个升降机构,以实现拖拽平板车的功能。
参考文献:
[1]“新工科”建设行动路线(“天大行动”)[J].高等工程教育研究,2017(02):24-25.
[2]钟登华.新工科建设的内涵与行动[J].高等工程教育研究,2017(03):1-6.
[3]郑庆华.新工科建设内涵解析及实践探索[J].高等工程教育研究,2020(02):25-30.
