软硬结合:小学创客教育课程的 设计与开发
许佳洁
江苏省信息技术教材里,小学阶段课程包括“信息技术基础”“算法与程序设计”“人工智能初步”“机器人技术”和“物联网技术”五个模块。五年级的Scratch软件教学就属于“算法与程序设计”模块。其中,课程中的前13课是编程学习,是掌握Scratch数字化作品创作的基本制作流程和设计方法;第14课到第18课,是了解开源硬件主控板结构,学习使用软件获取传感器数据、感知外部环境和利用传感器控制角色运动的方法。整个单元注重计算思维方法的教学,让学习者感受编程过程,理解脚本含义,最终能通过一定的脚本来表现自我设计的作品。无锡市梁溪区尝试将编程与传感器教学整合重构,设计和开发了《基于mBot小车的开源机器人课程》,使学习者不仅体验脚本编写,还参与解决生活中遇到的实际问题,知行合一,培养创新精神,提升计算思维和实践能力。
在《基于mBot小车的开源机器人课程》中,编程教学选用mBlock软件,它是基于Scratch软件集成开发的图形化编程软件,配合电子传感器模块还能设计互动作品,第一课就学习mBlock软件的基本操作。而开源硬件选用了mBot机器人,在与mBlock软件连接后,就能编写程序指挥机器人行动了,甚至能让机器人学会自己思考,完成指定任务,第二课就是掌握mBot机器人的基本使用。第三课是教学mBlock软件连接mBot机器人的方法,编写、上传程序实现机器人的操控。从软件操作到硬件搭建,学生真正全身心投入,多感官参与,学习兴趣足,气氛热烈。再之后的课程内容,都结合了mBot机器人的电子传感器模块,以编程为辅,更多地给予学生时间和精力去自主探究,去实践创新,去解决问题。以下笔者将选取部分课例进行具体的对比分析。
● 整合重构,获得感性认知,实现知识应用物化
Scratch的第5课是《画正多边形》,教学时,学生先自主学习掌握“画图”模块的基本控件画出直线,然后自主探究画出正方形,接着通过样例的实践对比,找到规律画出正多边形,最后自主运用规律,画出更多图形。学生经历了尝试、观察和归纳,体验了搭建、调试和运行程序的过程,理解领会了知识,掌握了技能,还加以灵活应用,实现了拓展创新,在电脑上画出了属于自己的创意图形。
重构后,第四课就学习画正多边形,还增加了mBot机器人直行、转弯和“走”出正方形轨迹的教学内容,课名定为《走正多边形》。课堂中,学生借助机器人在现实世界的运动,理解掌握程序,还可以在真实场景中展现自己的创意。
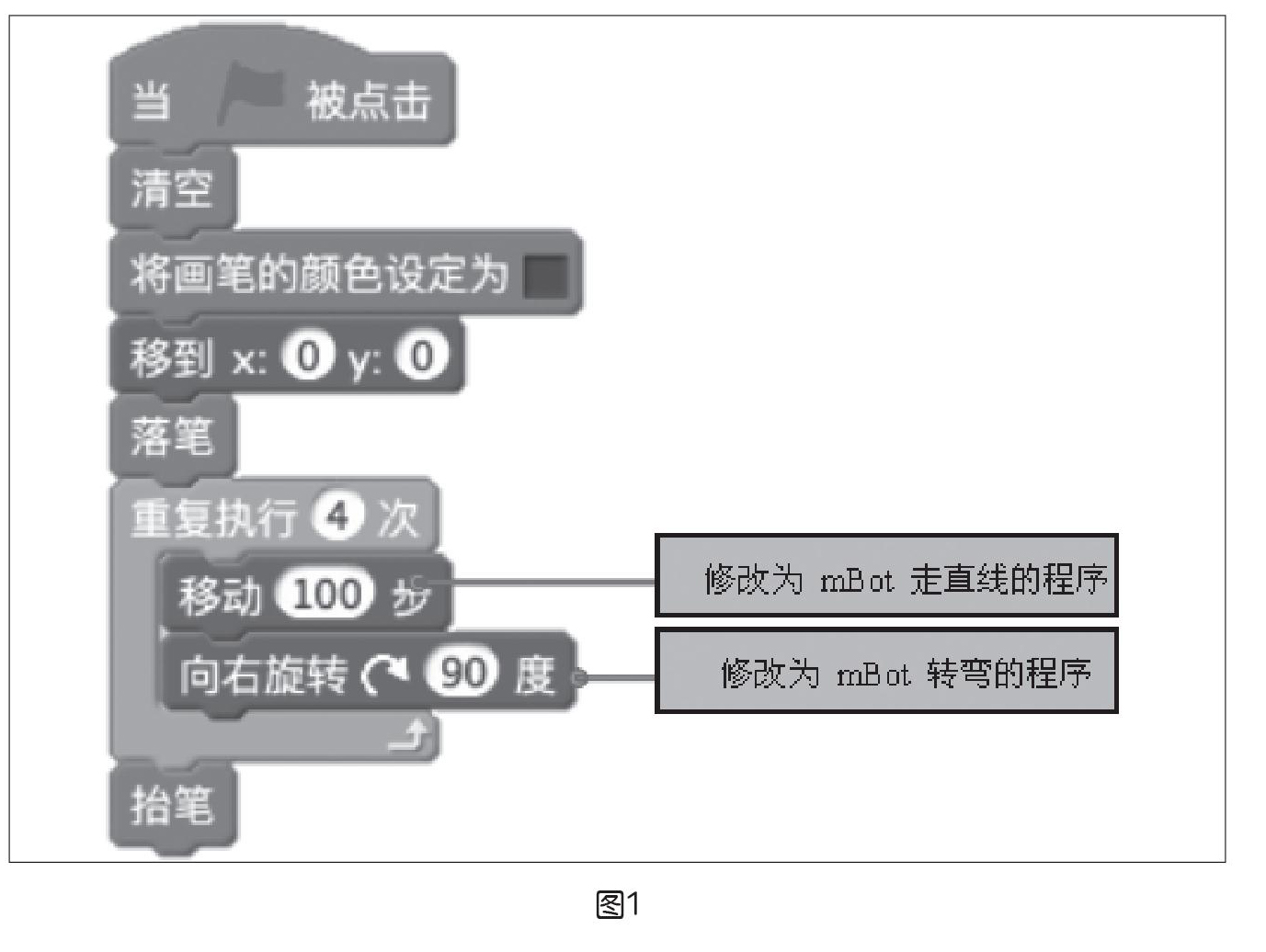
教学时,学生先掌握画直线和正多边形的脚本,然后学习如何利用直流电机,编写程序实现mBot机器人在现实世界的直线行走,接着对比“画正方形”的脚本(如图1),反复研究修改,探索实现mBot机器人“走正方形”轨迹的任务。教学时,学生可以根据个人情况,选择独立思考探究,或组内互助协作,大胆尝试修改命令参数中的数值,观察其对机器人运动的影响,在反复体验、直观感受中,学会控制机器人的直行与转弯,内化对程序模块的理解。另外,通过“比比谁的正方形走得更美观,用时最短”等活动,学生在真实场景中将自己的创意物化,提高了对实践的兴趣,培养了良好的调试程序的习惯。
类似的还有第五课,从画圆到mBot机器人走8字;第六课,从侦测控件到超声波测距传感器;第七课,从判断移动到巡线传感器等。学生在实践的过程中,获得感性认知,将自己的创意实体化,实现对知识和技能的双重把握,并且极大地激发了学习热情。
● 整合重构,分层教学知识迁移,实现互动多元化
Scratch的第7课是《穿越迷宫》,教学时,学生先自主完成设置舞台和角色的基本操作,通过交流掌握小猫跟随鼠标走迷宫的脚本搭建;然后,在体验脚本搭建、调试和运行的过程中,领会如何使用多种侦测和判断脚本帮助小猫躲避障碍;最后可以在小老师的带领下,掌握具有条件判断功能的简单脚本,并尝试运用侦测和判断控件来创作故事或游戏,与小伙伴一起分享作品,相互评价。
重构后,侦测和判断的教学内容组成第六课《自动驾驶》,走迷宫则与mBot机器人巡线前进结合为第七课《巡线走》,还衍生了第八课《遥控移动》,学习用遥控器来控制mBot机器人。课堂中,学生借助流程图理解任务,完成分层目标积累相应经验后,再通过实践和创造,激活已掌握的知识技能,实现知识迁移。
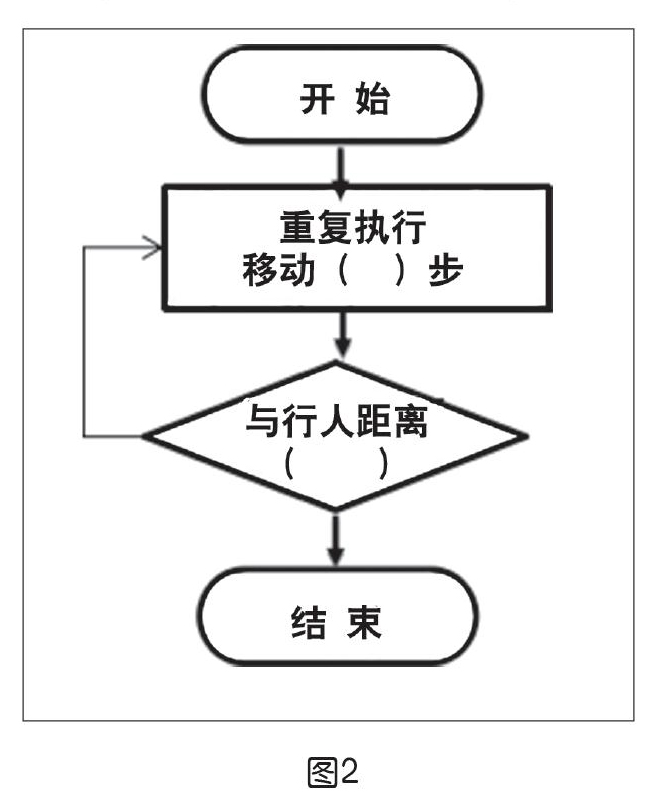
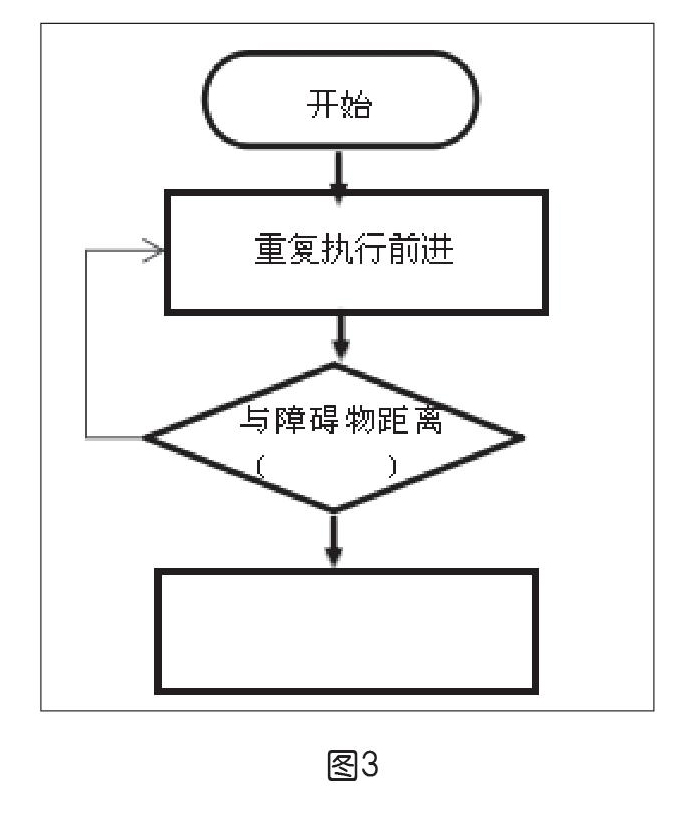
多类侦测和条件判断脚本是难点,教学時,学生从生活经验感悟理解,如车辆在行驶中如果与行人、障碍物距离过近就要刹车,由此引出距离侦测。在明确整个侦测过程后,学生自主完善流程图(如下页图2),并根据流程图编写脚本完成“小M侦测到有人就停下”的任务。随后,引导学生再次结合实际生活,如汽车行驶时遇到行人,一般会先鸣笛示意,再减速直到停止,学生在交流分享中补全流程图,并合作探究完善脚本。经过分层铺垫推导,学生尝试、思考、讨论,再进一步思考,每个人都能有不同的收获。借助学习相似点,知识继续迁移,怎样能让mBot机器人实现无人驾驶呢?可以借助超声波传感器,教师讲解传感器相关知识,学生自主探索对应的控制语句,完善相应流程图(如下页图3),合作修改机器人程序。最后,通过“比比谁设计的程序更厉害”引导学生深入思考,激发创意。以学生自主学习为主,以教师引导探究为辅,学生根据分层实践步骤,切身体验,与实物结合,充分理解了条件判断脚本的含义。
重构后的第六课到第八课,从鼠标键盘控制角色的移动,到遥控器控制机器人的移动,多元化的互动方式,丰富了知识面,增强了趣味性,不断激发学生进行创新思考,开发拓展程序,举一反三。
而从第九课到第十三课,每课结合一个传感器进行教学,引导学生从生活语言到流程图再到程序语言,逐渐培养规划意识,提升计算思维,经历发现问题、分析问题并解决问题的过程,培养结构化程序设计思想,建立知识框架。课堂里,学生从自学思考、动手探究再到学以致用,不仅仅完成了知识的习得,还实现了知识的温故知新、运用实践和迁移创新。
● 整合重构,拓展知识空间,创意精彩生活
Scratch的第9课是《赛车游戏》,教学时采用任务驱动法,将教学任务分成五个部分——舞台角色、保持前进、偏离回归、到达终点和加入计时,将知识点凸显,以竞技促学习。学生在完成任务的过程中掌握这些知识点,明确各种控件的应用技巧与方法;在比赛中锻炼抽象思维,提高知识运用能力;在个性化创作中,培养创新意识,提高动手实践能力。
再看重构课程,第十四课《自制智能小道闸》和第十五课《完善智能停车系统》,两课一起最终制作出小区车库的智能停车系统。课堂上运用“情景式教学”“项目式学习”“问题引导”等教学方式,立足生活实际,注重拓展情境,调动学生已有认知,激发学生的问题意识和探究欲。教学时,将演示与探究结合,引导学生由简入难,领会传感器间的相似点、关系,接着小组合作,分别完成“停车位”mBot机器人和“车库道闸”mBot机器人的制作,实现共同模拟测试,最终师生多向交互沟通,一步一步完善智能停车系统,锻炼综合分析处理问题的能力。
从任务分解一一应对,到有意识地拓展知识体系,拓展学习空间,激发了学生的创新动力,学生的视野不受限于课本课堂,而是放眼于更广阔的开放舞台。在掌握了一定的项目开发技能后,学生更可以拓展创作,自由开发更多有趣的项目,创意精彩生活。
以上对比分析只是笔者初步的思考与实践,梁溪区的创客教师们,努力奋战在教学一线,不断研究探讨,积累经验,把自主、合作、探究等方式融入课堂教学,引导学生理解程序设计的意义,发展创造性,形成解决问题的逻辑思维和创新意识,鼓励学生大胆展现自己的创意,化编为变,在运用知识、不断巩固的过程中,成长为创造者和发明者。
