大比例尺水深断面测量效率影响因素分析
肖冉++方佳敏

摘 要:国家经济的快速发展推动了长江航运建设,新增修建众多的整治建筑物,使得各单位大幅增加了对整治建筑物的大比例尺测量。而在实际测量过程中,受到过往船舶、自身船速等因素的影响,测量效率不能很好的保证,本文对这些影响因素进行了总结分析,并提出了相应的改进措施,以期达到提高效率并能对今后在大比例尺测量方面起到了一定指导和借鉴的目的。
关键词:大比例尺 船舶航行速度 旋回初径
随着我国经济快速发展,现代航运业对长江航道有了更高要求。2014年国务院印发39号文,提出打造“黄金水道”,建设长江经济带的战略思路,长江航道迎来了新一轮建设大发展。整治建筑物的增多使各单位大比例尺工程测量较以前大幅增加而大比例尺测量要求高、难度大,外业数据采集对整个任务完成起决定性作用。本文将从实际工作出发,探索分析如何提高大比例水深断面测量效率。
长江航道测量概论
长江航道测量与其他陆域地籍施工测量不同,其施测任务范围一般是半淹或全部淹在水下,所以长江航道水深测量一般由陆上地形测量和水下水深测量两部分组成。水深测量基本工作原理是在测量船上利用高精度载波相位差分GPS定位保证平面、高程位置的准确,配合一台测深仪,通过计算机上的导航软件“Haida海洋测量”,处理GPS及测深仪数据信息,统一时钟误差,自动同步定位、采集水深。测量船按照软件实时显示的船位及航迹线,沿提前布置好的断面线,从下游第一条断面线开始逐条断面测量,重点讨论研究大比例尺水深测量。
影响测量效率的分析
1、过往船舶的干扰
在实际的施工测量中我们发现,如果施测区域在航道内或者附近,过往船舶较多,会对测量工作有较大的干扰。船舶施测必须严格按照提前布设的断面线施测,若有行轮在测区穿行,按照《内规》相关规定,为确保安全,测量船一般都需在船舶交汇处(假设为A点)做避让动作,在风流压的作用下,即使停车或者慢速航行船舶都会慢慢的游离断面线。完成全部避碰动作之后,由于水流、风压、尾浪及船舶的惯性作用,测量船重新找到A点接着进行测量难度较大,需要很精准的船舶操作技巧,需要花费很多时间。
2、船舶航行速度影响
船舶速度是影响测量效率的重要原因,速度快,相应的跑完全部断面线的时间耗时最短,效率最高。现阶段我们使用的都是回声测深仪,回声测深仪工作原理是利用换能器在水中发出声波,当声波遇到障碍物而反射回换能器时,根据声波往返的时间和所测水域中声波传播的速度,就可以求得障碍物与换能器之间的距离。因此,船舶速度太快,会使换能器无法接受到其发出的声波信号,形成测量盲区,导致测深仪无法获得水深数据。船速过慢,又会拖慢测量效率。
3、船舶掉头影响
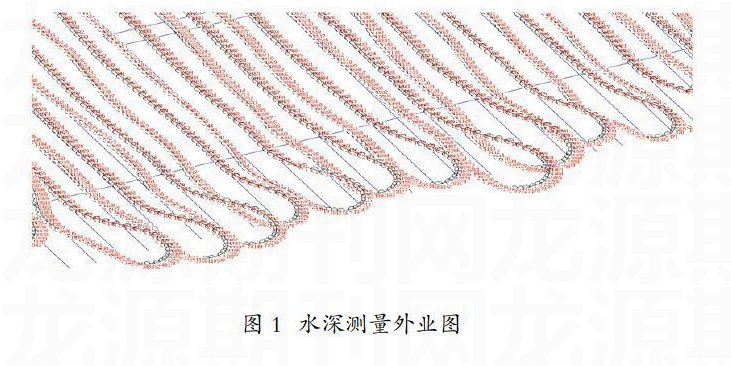
测量船一般都是完成一根断面的测量后,转弯调头,再进入下一根断面进行测量,由于断面之间的距离达不到船舶调头的最小水域要求,因此在进入下一条断面时,船舶都是采用提前减速,留出足够的回旋空间,再调头上断面,下图是一张测绘轨迹选。从图1可以明显看出,在转弯调头时,船舶绕行,增加了很多不必要的航程。
提高效率的对策探讨
1、航标调整
根据现场实际情况,如条件允许,可采用调标等手段将测区与航道隔开,临时划为施工占用水域,调整后及时利用高频电台进行播报,向过往行轮告知调标情况,并与海事局加强沟通联系,及时通报施工情况,尽量获得海事局的行政手段支持。引导行轮在测区以外航行,减少过往行轮在测区穿行的情况。
2、选择合理航行速度
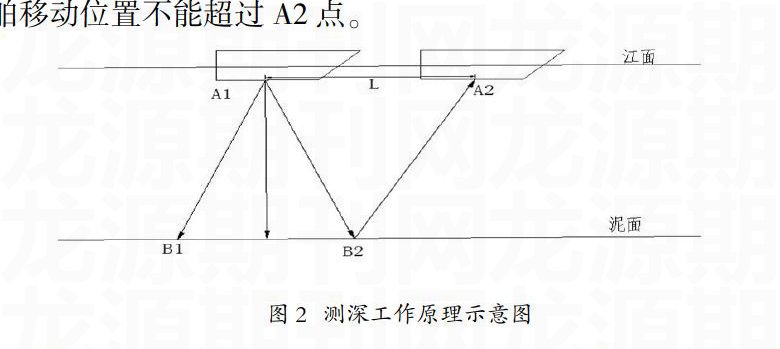
船速大小与测深值的关系分析。若要效率高,船速越快越好,为此我们进行在保证换能器能正常接受回波信号的情况下,船速极限的分析。测深仪换能器发出的声波不是单束,而是存在一个波束角α,声波信号呈椎面向四周发射。假设船舶发出的声波信号圆锥底面直径为S,沿船舶纵轴线取圆锥底面直径边缘两点B1、B2两点,那么相应的声波信号返回范围为A1、A2,即船舶在A1发射信号后,船舶若要接受到信号,则船舶移动位置不能超过A2点。
设船速为V,声速为C,声波一次发生并接受时间为T, A1B2=H1,A2B2=H2。那么测量艇位移A1A2=L=B1B2=VT,即有:
■,
■
且■
即可推导出船舶最大速度Vmax=C×sin(α/2)。以长江航道广泛使用的无锡海鹰1600型测深仪为例,查阅相关件参数,确定其波束角为8°,船舶声速取1500m/s,可得船舶最大速度104.63m/s。即测量艇在376.7 km/h的速度内行驶,可确保测深仪收到回声信号,若超出此速度,其接收将受影响。
3、交叉测量
查阅《水运工程测量规范》对断面线之间的间距有如下规定:
在实际工作中,长江航道整治建筑物观测任务的比例尺一般为1:500或者1:1000。根据《水运工程测量规范》即可确定断面线间距。
船舶的旋回圈的大小与船型、舵面积、所操舵角、操舵时间、载态、水深、船速、船舶的纵倾和横倾、螺旋桨转速等密切相关。另外,受风、流的影响,旋回圈的大小也有很大变化。在计算时,我们确定一个理想状态,船舶在满车满舵调头,那么船舶最小回旋圈即为定常旋回直径D——指船舶作定常旋回时重心轨迹圆的直径。
D=2R=2V/r=2V/(Kδ)
K:船舶的旋回性指数;δ:船舶尾部转角度;r:船舶旋转角速度。
为进一步简化计算,常旋回直径D可做估算,大约为DT(旋回初径 )的0.9~1.2 倍。
DT(旋回初径 ):船舶原来航线至船首转向180°时,船纵中剖面所在位置之间的距离,一般约为3~6L(船舶型长)。以测量艇为例,船舶最小回旋圈为14m,在1:500的测图中按照《水运工程测量规范》断面线间距为5m-7.5m,断面间距不满足最小回旋圈的距离因此船舶不能直接调头。在船舶状态,测图比例、断面线间距固定的情况下,如果隔一条断面测一条,船舶是可以在满车满舵的情况下调头进入断面,保证船舶在不做停车减速或下驶转圈的情况下顺利完成测量,将待断面线从下自上依次编号,第一次先完成奇数号的断面测量,再回来进行第二个偶数号的断面测量,最后将两次测量的数据分别导出,在内业处理软件合起来,即能达到测图要求。例:汛期,对嘉鱼顺坝开展1:500的观测。测区500m×1000m,布设断面线84条。首先分析航道测图,保证航道尺度,在测区旁设黄浮一个,并通过高频引导行轮通行。然后将测量分为两次,首先是第一轮1、3、5……条奇数测线测量,然后再回来进行第二轮2、4、6……偶数条侧线的测量。
由于断面之间水域足够大,且不需要避让行轮,船舶不用停车减速、倒车、转圈,速度快,耗时3.3t。而以往最少要用5t-6t才能完成,采用新手段后,效率提升明显。
注意事项
在实际测量中,受风、浪、流的作用,根据各个船艇的实际情况,船舶的实际回旋半径可能有所变化,驾驶员应根据实际情况,在调头前,可采取使船舶有一定向下的舵角后再调头,提高船舶上断面线的效率。
测量员要控制好两次的间隔时间,确保合理分布。测区范围较大时,尽量不要出现第一天完成全部奇数断面测量,所有偶数断面在第二天完成的情况,如果出现此情况也应严格控制好水位。
调标要注意航道情况,在保证航道水深、航宽的情况下才能进行,加强瞭望,以防船舶不按标行船,误入施工区。
(第一作者单位:长江重庆航道工程局,第二作者单位:长江武汉航道局)
