基于多基准站联合伪距差分的RBN—DGNSS系统再改造设计
沈建华
摘要:船本文对我国现有RBN-DGNSS系统现状,發挥的作用以及系统局限性进行了分析,依据国际航标协会(IALA)关于未来的DGNSS相关建议指南,设计了基于多基准站联合伪距差分的再改造方案,分析了系统原理和实现流程,提出了预播发完好性监控的算法。方案通过整合RBN-DGNSS、BD-CORS系统资源,在RBN、AIS和4G网络进行多站联合伪距差分综合伪距差分信息的播发,以期实现我国沿海广域米级、沿岸分米级、重点水域厘米级的定位服务。
关键词: 多基准站 伪距差分 RBN-DGNSS 改造
0引言
为提高船舶进港靠泊时的定位精度,确保航行安全,国际航标协会(IALA)在1994年发布了“关于差分全球导航卫星系统(DGNSS)规划的通函”,1999年发布了“关于提供在283.5—315kHz频段(1区)和285—325kHz频段(2和3区)的海上无线电导航服务的建议(IALA R115号建议)”,各成员国积极响应,陆续建立了众多覆盖沿海的RBN-DGNSS系统,以向沿海航行船舶免费提供高精度的定位导航服务。据IALA官方网站显示,目前全球已有50余个国家和地区,运行中的RBN-DGNSS台站达400余座。我国从20世纪90年代开始,陆续建设该系统,截至目前,全国沿海运行中的台站有22座。该系统基于国际海运事业无线电委员会RTCM 104特委会推荐标准,在无线电指向标载频(283.5-325kHz)上播发差分改正信息,船舶用户接收该信息并对自身定位结果进行修正以大幅提高精度,属于单站伪距差分,定位精度达到5m(95%置信度)。
随着全球海洋开发的深入,对于高精度定位导航的需求和精度等级都在不断增加,现有RBN-DGNSS系统相对星基和其他地基增强系统已无明显优势,为充分发挥该系统应有的效能和作用,对其进行全面评估和再设计,成为摆在全球航标管理当局面前不可回避的一项迫切任务。IALA对在确保现有RBN-DGNSS服务的情况下,升级改造该系统持赞成的态度,并发布了一系列的建议指南,其中“关于未来的DGNSS”的建议指南,以及全球无线电导航规划(版本2)中,对未来DGNSS系统改良进行了部分概念的明确,卫星导航系统的多模兼容以及多基准站联合差分是其考虑发展的方向。在国际上,德国和瑞典等航海发达国家已经启动了对现有RBN-DGNSS系统再改造和投资的前期研究[1]。在国内,我国从2015年开始启动了对全国沿海RBN-DGPS系统的升级改造,由原来的单一播发差分GPS信息过渡为差分北斗和差分GPS信息的融合播发,改造后的RBN-DGNSS系统精度达到了2m,系统可用性和可靠性都得到了大幅的提高。该改造工程对于推广使用我国自主的北斗系统,以及提升沿海RBN-DGNSS系统整体服务水平都具有积极的意义,符合IALA对于未来DGNSS多模兼容的建议指南。为充分响应IALA建议,全力提升现有RBN-DGNSS系统效能和服务水平,结合我国北斗系统发展需求以及沿海助航设施的现状,本文对基于多基准站联合伪距差分的RBN-DGNSS系统再改造进行了研究,并分析探讨了系统的多种应用模式,以期为今后系统的再升级,提供理论参考和实施建议。
1 总体架构设计
基于多基准站联合伪距差分的RBN-DGNSS系统再改造设计,将整合现有的全国沿海RBN-DGNSS系统、全国沿海北斗/GPS连续运行服务参考站系统(BD-CORS)以及全国沿海船舶自动识别系统(AIS),其中全国沿海运行中的22座RBN-DGNSS台站和2016年底将建成的60座(“十三五”规划中近200座)BD-CORS站原始观测数据作为多基站联合伪距差分的数据来源。考虑到规划中北海、东海和南海海区3个BD-CORS数据中心,3个RBN差分北斗监控中心实现信息联网,数据汇总入北斗综合数据中心,实现集中监控管理。本设计将直接从北斗综合数据中心获取原始观测数据(北斗/GPS双模)。
通信链路有三种方式,包括沿海无线电指向标、AIS通信网络以及公用4G网络,不同的通信链路采用不同的多站联合伪距差分策略,提供不同等级的定位精度。
(1) 沿海无线电指向标播发方式:根据单个特定RBN-DGNSS播发台与周边基准站相对地理位置的不同,在数据处理中心进行多基准站联合伪距差分改正数生成时,参考的基准站距离播发台越近,其计入的影响因子权重越大,播发数据采用RTCM V2.3格式,由于我国RBN-DGNSS系统采用200W功率发射,信号覆盖区域为300km,用户终端采用北斗/GPS双模联合解算方式,可实现米级定位精度,该方式符合IALA 121号建议指南。
(2) AIS通信网络方式:按照ITU-RM1371建议,使用17号专用电文进行综合伪距改正数播发,播发间隔不大于5分钟数据龄有效期,一般情况下,AIS基站的覆盖距离在20海里,近35公里左右,多基准站联合伪距改正信息空间相关性较大,即AIS基站附近的RBN-DGNSS和BD-CORS基准站相对密集,可实现分米级定位精度。该方式符合IALA 124号建议指南。
(3) 公用4G网络:由于可以采用双向数据通信,通过请求的方式定位,先发送定位终端自身的概略位置,可以优化多基准站联合差分时基准站选取的模型,多基准站联合伪距差分数据处理中心在综合伪距改正生成时可以根据该位置选择合适的(空间相关性最大)基准站观测数据,类似于CORS定位,也可采用RTCM 3.x格式播发载波相位差分数据,提供厘米级的定位精度。
设计的总体架构如图1-1所示:
2 多站联合伪距差分原理和实现
2.1 多站联合伪距差分原理
伪距差分定位的误差,剔除接收机内部噪声、通道延迟和多路径效应等自身的误差外,主要取决于其与基准站的空间相关性,一般而言,定位精度随着基线长度的增加而衰减,即接收设备与基准站之间距离对伪距差分的精度有决定性影响[2]。
多基准站联合伪距差分的原理是采用各基准站的原始观测数据分别计算其偽距改正数,并根据用户设备所处的相对位置(与各基准站的不同距离),通过合理的内插算法生成特定的伪距改正数并发送给用户设备,用户设备利用该伪距改正数进行差分定位以获得更高的定位精度[3]。
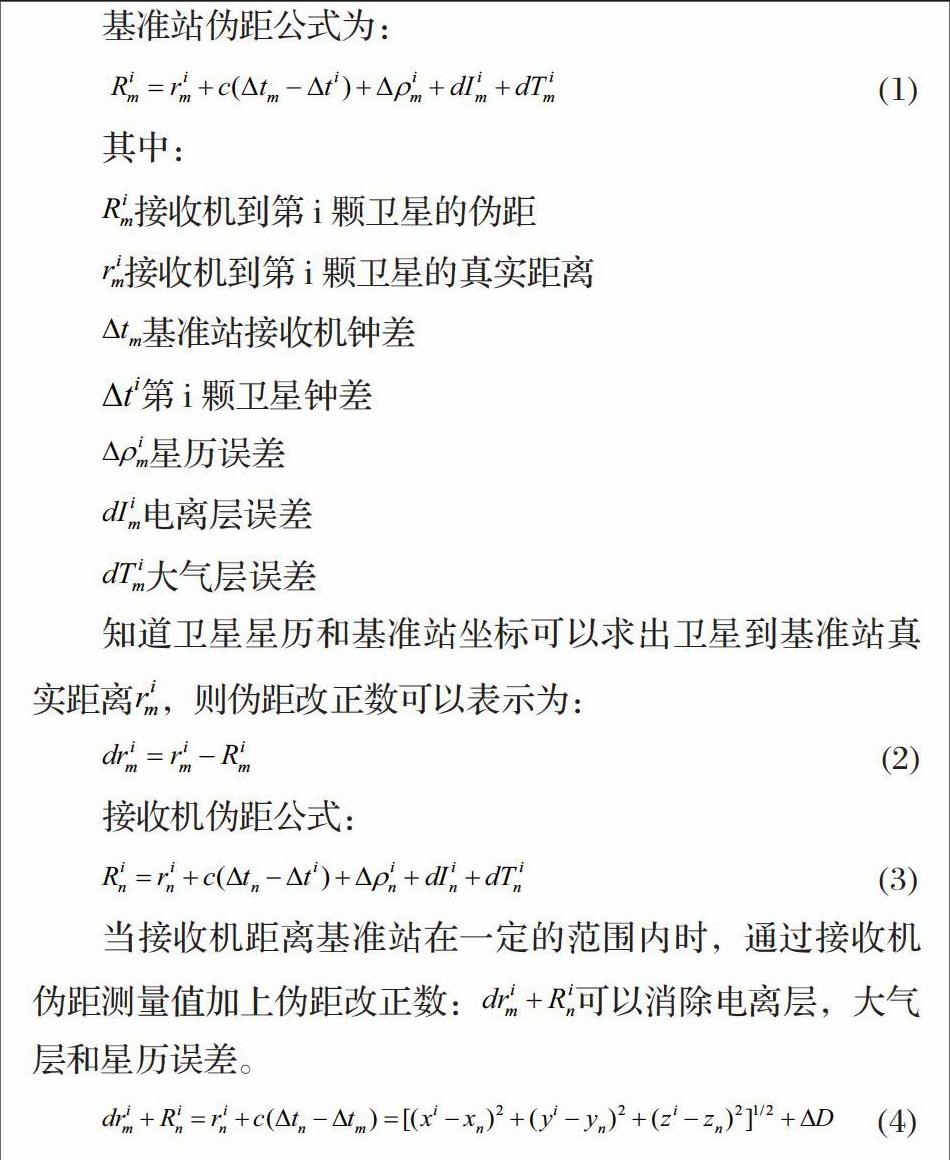
知道卫星星历和基准站坐标可以求出卫星到基准站真实距离,则伪距改正数可以表示为:
当接收机距离基准站在一定的范围内时,通过接收机伪距测量值加上伪距改正数:可以消除电离层,大气层和星历误差。
其中可以由基准站发送信息中得到。△D作为一个位置参数,通过观测4颗以上共视卫星,就可以解算出用户接收机的坐标,但随着距离的增大,大气误差相关性减弱,定位精度必然降低。因此,当用户接收机周围有多个基准站时,就可以充分利用各个基准站伪距改正数来综合修正用户接收机的伪距观测值[4]。
从(2)式中可以看出,伪距改正数不仅包括电离层、大气层误差改正,而且还包含卫星钟差和基准站接收机钟差,在融合多基准站伪距改正数时,因各基准站接收机钟差不存在一定的线性关系,若将该项也采用空间相关模型进行融合改正,必将引起更大的偏差。根据参考文献,可以采用伪距差分改进模型,去除基准站接收机钟差影响[5]。改进后的伪距改正数受测站空间距离影响较大,因此在进行多基准站伪距改正数融合计算时,可以采用与空间相关的误差模型。根据现有的研究成果,采用Han等2000年提出的线性组合内插模型,不仅可以消除空间相关误差,还能有效减弱多路径效应及观测噪声的影响[3]。
北斗/GPS双模伪距差分定位的原理与单系统伪距差分定位原理基本相同,但采用双系统观测数据进行伪距差分定位时,可用卫星数会大大增加,考虑到各导航定位系统的精度与稳定性,需要给北斗和GPS分配相应不同的权重。除此之外,两者在数学模型上并无区别。
2.2多站联合伪距差分定位实现
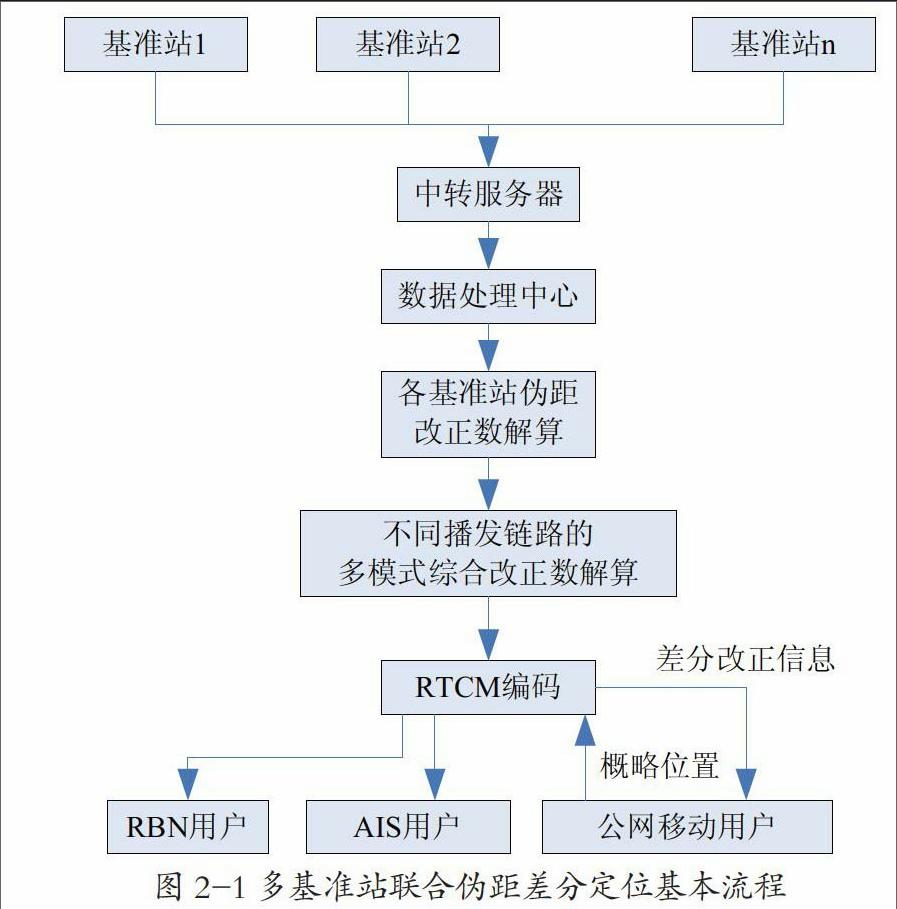
多基准站联合伪距差分首先通过网络获取各基准站伪距观测值,根据各个基准站已知坐标实时解算各卫星对应的伪距改正数,然后根据用户和播发方式的不同,主要考虑空间地理相关性,采用不同的内插模型融合生成综合伪距改正数和改正数变化率,最后将综合伪距改正信息编码生成RTCM V2.3,经一定的数据链路播发给用户接收机,实现差分定位。该方法,数学模型较为简单,精度较单站伪距差分能有显著提高,其实现流程如下图2-1所示。
由图2-1可见,如何综合利用各基准站伪距改正数解算出用户终端伪距改正数是采用多基准站联合伪距差分定位的关键所在。
3 系统完好性监控
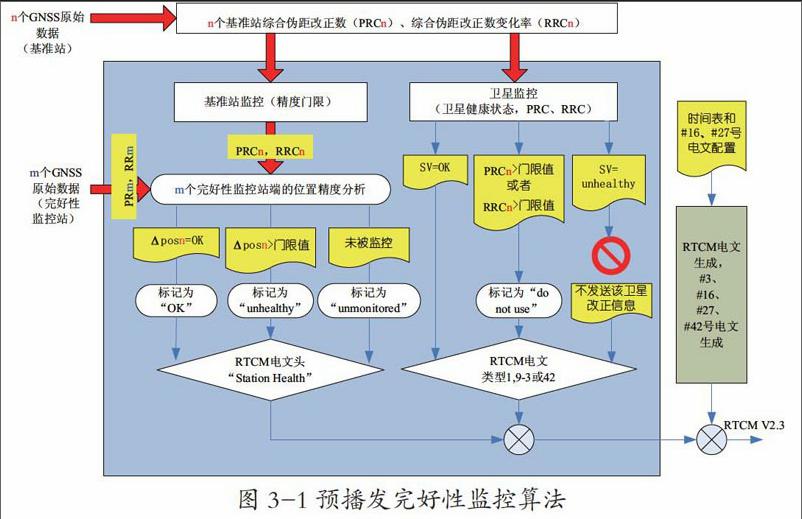
现有的RBN-DGNSS系统的完好性监控有本地监控和远场监控两种模式,均是通过信标接收机接收到发射台发射的信号后,利用接收到的伪距改正数(PRC)和伪距改正数变化率(RRC)来计算自身的位置,如果计算出的位置超出了预设的门限值就会发出警告。而多基准站联合伪距差分采用多站联合解算的模式,可以在综合改正数分发前将差分数据与基准站伪距观测值在数据处理中心进行差分定位解算,再与基准站精确位置进行比对,如果超出预设的门限,该改正数就被认为是无效的,做丢弃不发送处理,这种改正信息播发前进行的完好性监控称为预播发监控模式,相对传统的RBN-DGNSS完好性监控模式,减少了无效数据的发送,提高了链路效率和接收终端差分定位的可靠性。预播发监控算法如图3-1所示:
由于采用了预播发监控,原有RBN-DGNSS台站本地的完好性监控理论上可以不要,使其作为基准站备份,然而,由于本地完好性监控能对无线电指向标信号进行接收和监测,故本设计保留台站本地完好性监控站,继续按照RTCM 基准站完好性监控标准(RSIM)执行本地监控。从图3可以看出,预播发监控分为以下两个类型[1]:
(1)卫星相关监控
预播发监控执行对失效卫星的检测。如果有以下情况,表明卫星失效:
○GPS、BDS系统提供者标记卫星为“unhealthy(不健康)”,
○DGNSS系统服务提供者标记卫星为“unhealthy(不健康)”,
○伪距改正数PRC或者伪距改正数变化率RRC超出了用户预设的门限值。
由于进行了以上各项的检测,预播发监控算法将会组织改正信息的播发,或者用RTCM电文(类型1、类型9-3、类型42)标记卫星状态为“do not use(不要使用)”。
(2)对多基准站生成的改正信息质量进行完好性监控
预播发监控的主要任务是检测错误的或者不够精确的多基准站综合伪距改正信息。计算的依据是解算的位置与给定位置的偏离量以及预设的门限值。对这种完好性监控而言,改正信息生成时,使用的是独立的GNSS原始数据流,而这些数据流并非多基准站联合生成改正信息过程中所产生的。如果是以下情形,就认为多基准站生成的综合改正信息流是失效的。
○计算出来的位置误差高于预设的门限
→虚拟基准站将被标记为“不健康(unhealthy)”
○不能获取监控对象或者监控功能不能执行
→虚拟基准站将被标记为“未被监控(unmonitored)”
两种完好性监测功能必须在10s的警告时间(TTA)限制内进行。
4 结语
随着卫星导航技术的发展,尤其是我国北斗系统的不断完善,现有RBN-DGNSS系统必须适应技术发展而进行升级改造,在IALA相关建议框架下,通过多基准站联合伪距差分,以RBN、AIS以及其他通信网络实现差分数据播发,是一种积极的探索,同时,这种解决方案也符合e-航海关于将不同功能分离至不同服务的架构。相关多基准站联合伪距差分算法和预播发监控等关键技术还需要进一步研发,并进行实际效果测试,相信经过软硬件优化,基于多基准站联合伪距差分的RBN-DGNSS系统再改造在不久的将来将会成为现实,真正在我国沿海实现广域米级、沿岸分米级、重点水域厘米级的定位服务。
参考文献:
[1] Michael Hoppe.基于虚拟基准站(VRS)的中频无线电信标系统的再投资.2014年IALA大会论文集.
[2] 喻国荣,王庆,彭慧.多参考站网络的虚拟观测值生成算法[J].东南大学学报:自然科学版,2007,37(6).
[3] 邓建,王庆,潘树国,赵兴旺.基于多参考站的分米级GPS伪距差分定位方法[J]. 东南大学学报:自然科学版,2010,40(2).
[4] Farrell Jay,Givargis Tony. Differential GPS reference station algorithm—design and analysis[J].IEEE Trans 2 actions on Control System Technology,2000,8(3).
[5] 冯宝红,叶松.GPS伪距差分解算改进模型的研究.南京工业大学学报[J],2005,27(4).
摘要:船本文对我国现有RBN-DGNSS系统现状,發挥的作用以及系统局限性进行了分析,依据国际航标协会(IALA)关于未来的DGNSS相关建议指南,设计了基于多基准站联合伪距差分的再改造方案,分析了系统原理和实现流程,提出了预播发完好性监控的算法。方案通过整合RBN-DGNSS、BD-CORS系统资源,在RBN、AIS和4G网络进行多站联合伪距差分综合伪距差分信息的播发,以期实现我国沿海广域米级、沿岸分米级、重点水域厘米级的定位服务。
关键词: 多基准站 伪距差分 RBN-DGNSS 改造
0引言
为提高船舶进港靠泊时的定位精度,确保航行安全,国际航标协会(IALA)在1994年发布了“关于差分全球导航卫星系统(DGNSS)规划的通函”,1999年发布了“关于提供在283.5—315kHz频段(1区)和285—325kHz频段(2和3区)的海上无线电导航服务的建议(IALA R115号建议)”,各成员国积极响应,陆续建立了众多覆盖沿海的RBN-DGNSS系统,以向沿海航行船舶免费提供高精度的定位导航服务。据IALA官方网站显示,目前全球已有50余个国家和地区,运行中的RBN-DGNSS台站达400余座。我国从20世纪90年代开始,陆续建设该系统,截至目前,全国沿海运行中的台站有22座。该系统基于国际海运事业无线电委员会RTCM 104特委会推荐标准,在无线电指向标载频(283.5-325kHz)上播发差分改正信息,船舶用户接收该信息并对自身定位结果进行修正以大幅提高精度,属于单站伪距差分,定位精度达到5m(95%置信度)。
随着全球海洋开发的深入,对于高精度定位导航的需求和精度等级都在不断增加,现有RBN-DGNSS系统相对星基和其他地基增强系统已无明显优势,为充分发挥该系统应有的效能和作用,对其进行全面评估和再设计,成为摆在全球航标管理当局面前不可回避的一项迫切任务。IALA对在确保现有RBN-DGNSS服务的情况下,升级改造该系统持赞成的态度,并发布了一系列的建议指南,其中“关于未来的DGNSS”的建议指南,以及全球无线电导航规划(版本2)中,对未来DGNSS系统改良进行了部分概念的明确,卫星导航系统的多模兼容以及多基准站联合差分是其考虑发展的方向。在国际上,德国和瑞典等航海发达国家已经启动了对现有RBN-DGNSS系统再改造和投资的前期研究[1]。在国内,我国从2015年开始启动了对全国沿海RBN-DGPS系统的升级改造,由原来的单一播发差分GPS信息过渡为差分北斗和差分GPS信息的融合播发,改造后的RBN-DGNSS系统精度达到了2m,系统可用性和可靠性都得到了大幅的提高。该改造工程对于推广使用我国自主的北斗系统,以及提升沿海RBN-DGNSS系统整体服务水平都具有积极的意义,符合IALA对于未来DGNSS多模兼容的建议指南。为充分响应IALA建议,全力提升现有RBN-DGNSS系统效能和服务水平,结合我国北斗系统发展需求以及沿海助航设施的现状,本文对基于多基准站联合伪距差分的RBN-DGNSS系统再改造进行了研究,并分析探讨了系统的多种应用模式,以期为今后系统的再升级,提供理论参考和实施建议。
1 总体架构设计
基于多基准站联合伪距差分的RBN-DGNSS系统再改造设计,将整合现有的全国沿海RBN-DGNSS系统、全国沿海北斗/GPS连续运行服务参考站系统(BD-CORS)以及全国沿海船舶自动识别系统(AIS),其中全国沿海运行中的22座RBN-DGNSS台站和2016年底将建成的60座(“十三五”规划中近200座)BD-CORS站原始观测数据作为多基站联合伪距差分的数据来源。考虑到规划中北海、东海和南海海区3个BD-CORS数据中心,3个RBN差分北斗监控中心实现信息联网,数据汇总入北斗综合数据中心,实现集中监控管理。本设计将直接从北斗综合数据中心获取原始观测数据(北斗/GPS双模)。
通信链路有三种方式,包括沿海无线电指向标、AIS通信网络以及公用4G网络,不同的通信链路采用不同的多站联合伪距差分策略,提供不同等级的定位精度。
(1) 沿海无线电指向标播发方式:根据单个特定RBN-DGNSS播发台与周边基准站相对地理位置的不同,在数据处理中心进行多基准站联合伪距差分改正数生成时,参考的基准站距离播发台越近,其计入的影响因子权重越大,播发数据采用RTCM V2.3格式,由于我国RBN-DGNSS系统采用200W功率发射,信号覆盖区域为300km,用户终端采用北斗/GPS双模联合解算方式,可实现米级定位精度,该方式符合IALA 121号建议指南。
(2) AIS通信网络方式:按照ITU-RM1371建议,使用17号专用电文进行综合伪距改正数播发,播发间隔不大于5分钟数据龄有效期,一般情况下,AIS基站的覆盖距离在20海里,近35公里左右,多基准站联合伪距改正信息空间相关性较大,即AIS基站附近的RBN-DGNSS和BD-CORS基准站相对密集,可实现分米级定位精度。该方式符合IALA 124号建议指南。
(3) 公用4G网络:由于可以采用双向数据通信,通过请求的方式定位,先发送定位终端自身的概略位置,可以优化多基准站联合差分时基准站选取的模型,多基准站联合伪距差分数据处理中心在综合伪距改正生成时可以根据该位置选择合适的(空间相关性最大)基准站观测数据,类似于CORS定位,也可采用RTCM 3.x格式播发载波相位差分数据,提供厘米级的定位精度。
设计的总体架构如图1-1所示:
2 多站联合伪距差分原理和实现
2.1 多站联合伪距差分原理
伪距差分定位的误差,剔除接收机内部噪声、通道延迟和多路径效应等自身的误差外,主要取决于其与基准站的空间相关性,一般而言,定位精度随着基线长度的增加而衰减,即接收设备与基准站之间距离对伪距差分的精度有决定性影响[2]。
多基准站联合伪距差分的原理是采用各基准站的原始观测数据分别计算其偽距改正数,并根据用户设备所处的相对位置(与各基准站的不同距离),通过合理的内插算法生成特定的伪距改正数并发送给用户设备,用户设备利用该伪距改正数进行差分定位以获得更高的定位精度[3]。
知道卫星星历和基准站坐标可以求出卫星到基准站真实距离,则伪距改正数可以表示为:
当接收机距离基准站在一定的范围内时,通过接收机伪距测量值加上伪距改正数:可以消除电离层,大气层和星历误差。
其中可以由基准站发送信息中得到。△D作为一个位置参数,通过观测4颗以上共视卫星,就可以解算出用户接收机的坐标,但随着距离的增大,大气误差相关性减弱,定位精度必然降低。因此,当用户接收机周围有多个基准站时,就可以充分利用各个基准站伪距改正数来综合修正用户接收机的伪距观测值[4]。
从(2)式中可以看出,伪距改正数不仅包括电离层、大气层误差改正,而且还包含卫星钟差和基准站接收机钟差,在融合多基准站伪距改正数时,因各基准站接收机钟差不存在一定的线性关系,若将该项也采用空间相关模型进行融合改正,必将引起更大的偏差。根据参考文献,可以采用伪距差分改进模型,去除基准站接收机钟差影响[5]。改进后的伪距改正数受测站空间距离影响较大,因此在进行多基准站伪距改正数融合计算时,可以采用与空间相关的误差模型。根据现有的研究成果,采用Han等2000年提出的线性组合内插模型,不仅可以消除空间相关误差,还能有效减弱多路径效应及观测噪声的影响[3]。
北斗/GPS双模伪距差分定位的原理与单系统伪距差分定位原理基本相同,但采用双系统观测数据进行伪距差分定位时,可用卫星数会大大增加,考虑到各导航定位系统的精度与稳定性,需要给北斗和GPS分配相应不同的权重。除此之外,两者在数学模型上并无区别。
2.2多站联合伪距差分定位实现
多基准站联合伪距差分首先通过网络获取各基准站伪距观测值,根据各个基准站已知坐标实时解算各卫星对应的伪距改正数,然后根据用户和播发方式的不同,主要考虑空间地理相关性,采用不同的内插模型融合生成综合伪距改正数和改正数变化率,最后将综合伪距改正信息编码生成RTCM V2.3,经一定的数据链路播发给用户接收机,实现差分定位。该方法,数学模型较为简单,精度较单站伪距差分能有显著提高,其实现流程如下图2-1所示。
由图2-1可见,如何综合利用各基准站伪距改正数解算出用户终端伪距改正数是采用多基准站联合伪距差分定位的关键所在。
3 系统完好性监控
现有的RBN-DGNSS系统的完好性监控有本地监控和远场监控两种模式,均是通过信标接收机接收到发射台发射的信号后,利用接收到的伪距改正数(PRC)和伪距改正数变化率(RRC)来计算自身的位置,如果计算出的位置超出了预设的门限值就会发出警告。而多基准站联合伪距差分采用多站联合解算的模式,可以在综合改正数分发前将差分数据与基准站伪距观测值在数据处理中心进行差分定位解算,再与基准站精确位置进行比对,如果超出预设的门限,该改正数就被认为是无效的,做丢弃不发送处理,这种改正信息播发前进行的完好性监控称为预播发监控模式,相对传统的RBN-DGNSS完好性监控模式,减少了无效数据的发送,提高了链路效率和接收终端差分定位的可靠性。预播发监控算法如图3-1所示:
由于采用了预播发监控,原有RBN-DGNSS台站本地的完好性监控理论上可以不要,使其作为基准站备份,然而,由于本地完好性监控能对无线电指向标信号进行接收和监测,故本设计保留台站本地完好性监控站,继续按照RTCM 基准站完好性监控标准(RSIM)执行本地监控。从图3可以看出,预播发监控分为以下两个类型[1]:
(1)卫星相关监控
预播发监控执行对失效卫星的检测。如果有以下情况,表明卫星失效:
○GPS、BDS系统提供者标记卫星为“unhealthy(不健康)”,
○DGNSS系统服务提供者标记卫星为“unhealthy(不健康)”,
○伪距改正数PRC或者伪距改正数变化率RRC超出了用户预设的门限值。
由于进行了以上各项的检测,预播发监控算法将会组织改正信息的播发,或者用RTCM电文(类型1、类型9-3、类型42)标记卫星状态为“do not use(不要使用)”。
(2)对多基准站生成的改正信息质量进行完好性监控
预播发监控的主要任务是检测错误的或者不够精确的多基准站综合伪距改正信息。计算的依据是解算的位置与给定位置的偏离量以及预设的门限值。对这种完好性监控而言,改正信息生成时,使用的是独立的GNSS原始数据流,而这些数据流并非多基准站联合生成改正信息过程中所产生的。如果是以下情形,就认为多基准站生成的综合改正信息流是失效的。
○计算出来的位置误差高于预设的门限
→虚拟基准站将被标记为“不健康(unhealthy)”
○不能获取监控对象或者监控功能不能执行
→虚拟基准站将被标记为“未被监控(unmonitored)”
两种完好性监测功能必须在10s的警告时间(TTA)限制内进行。
4 结语
随着卫星导航技术的发展,尤其是我国北斗系统的不断完善,现有RBN-DGNSS系统必须适应技术发展而进行升级改造,在IALA相关建议框架下,通过多基准站联合伪距差分,以RBN、AIS以及其他通信网络实现差分数据播发,是一种积极的探索,同时,这种解决方案也符合e-航海关于将不同功能分离至不同服务的架构。相关多基准站联合伪距差分算法和预播发监控等关键技术还需要进一步研发,并进行实际效果测试,相信经过软硬件优化,基于多基准站联合伪距差分的RBN-DGNSS系统再改造在不久的将来将会成为现实,真正在我国沿海实现广域米级、沿岸分米级、重点水域厘米级的定位服务。
参考文献:
[1] Michael Hoppe.基于虚拟基准站(VRS)的中频无线电信标系统的再投资.2014年IALA大会论文集.
[2] 喻国荣,王庆,彭慧.多参考站网络的虚拟观测值生成算法[J].东南大学学报:自然科学版,2007,37(6).
[3] 邓建,王庆,潘树国,赵兴旺.基于多参考站的分米级GPS伪距差分定位方法[J]. 东南大学学报:自然科学版,2010,40(2).
[4] Farrell Jay,Givargis Tony. Differential GPS reference station algorithm—design and analysis[J].IEEE Trans 2 actions on Control System Technology,2000,8(3).
[5] 冯宝红,叶松.GPS伪距差分解算改进模型的研究.南京工业大学学报[J],2005,27(4).
