船舶动力定位系统滤波器设计及仿真
孙晓娜 张闯


摘 要:针对船舶动力定位系统中单一滤波器的滤波性和稳定性差的问题,设计了基于Sage-Husa自适应滤波算法和强跟踪卡尔曼滤波算法相结合的自适应滤波算法,建立了动力定位船舶的数学模型,并根据此船舶设计了滤波器以及相应的算法,通过和实船测试数据的比较,两者的结论几乎一致,而且在工程上是可行的。
关键词:工程船 动力定位系统 自适应滤波算法
船舶动力定位系统概述
现今,动力定位系统已经广泛应用在海洋工程领域中,系统计算出船舶实际位置和目标位置的差值,之后根据外界的干扰力的作用计算出船舶回到初始目标位置应用的推力大小及方向,根据计算的值分配给船舶上的各个推进器,保证船舶在预先设置的位置或航迹上。
目前,动力定位系统的滤波器主要以Kalman滤波器和非线性滤波器为主。在实际中,所建立的模型由于船舶附加重量以及水动力线性阻尼系数的不精确而产生一定的偏差。此外,外界环境干扰的随机性以及系统噪声的统计的困难,导致在实船中参数的选择较困难。为了解决上述问题,本文设计了基于Sage-Husa自适应的滤波算法,同时结合强跟踪卡尔曼滤波算法的动力定位系统的综合滤波器。
船舶动力定位滤波器设计
1、船舶动力定位滤波器设计
建立三自由度方向上的船舶动力定位滤波器所需要的状态方程和量测方程。如式(1)所示。
式中,U—船舶本身与风对船舶产生的合力以及船舶自身合力矩与风对船舶产生的风力矩项之和;w—纵荡方向上的海洋环境因素。
2、改进的自适应滤波算法
将强跟踪卡尔曼滤波算法引入到改进的Sage-Husa自适应滤波算法中。通过加入未建模的误差来增加系统的过程噪声和量测噪声的方差阵,这样,使用低精度的滤波得到了强稳定性和高收敛性的滤波器的算法变得简单,同时可信度较高。如式(2)所示:
其中,在系统状态变量突变时,增大的估计误差将导致相应的加权系数以及误差方差阵V0k变大,从而通过增强滤波器的跟踪能力使系统的可靠性增强。
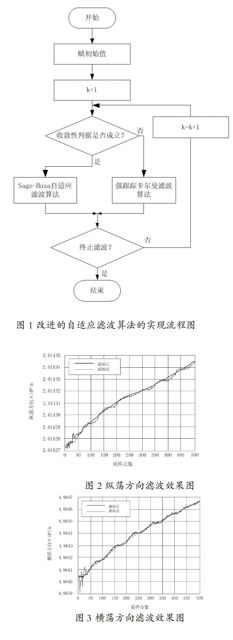
根据Sage-Husa自适应滤波以及强跟踪卡尔曼滤波算法各自的特点,提出了两种算法相结合的构思,构造新的自适应滤波算法,解决海洋工程船舶动力定位的滤波问题。Sage-Husa自适应滤波算法具有较高滤波精度以及较低稳定性的特点,而强跟踪卡尔曼滤波算法具有较低的滤波精度以及较高稳定性、适应性的特点。因此,将两者结合在一起,构成新的自适应滤波算法满足各自的优点,根据判断滤波器的收敛性,如果收敛则采用Sage-Husa自适应滤波算法;如果发散则采用强跟踪卡尔曼滤波算法。
系统的过程状态向量协方差无界则滤波器发散。将新息序列作为滤波器是否收敛的判据。而实际系统的过程状态估计误差包含于新息序列的项中。理论预计误差的新息可以通过新息序列的方差阵来描述,如式(3)中列出了新息序列中预计误差的新息公式。
为此,式(4)可以作为判断滤波器收敛性的标志。
其中1为可调系数。满足式(4)时,可以判定滤波器为稳定工作状态,选择使用Sage-Husa自适应滤波算法估计过程状态向量;不满足式(4)时,可以判定滤波器为发散工作状态,选择使用强跟踪卡尔曼滤波算法,加权系数的调整误差协方差阵,进而促进滤波收敛。改进的新的自适应滤波算法如图1所示。
船舶动力定位滤波器仿真
模拟环境为:平均风速约为10m/s,船舶吃水约为9m、排水量约为37000总吨、航速约为3节,船舶处于航行状态,在使用了本文设计的滤波器,船舶的纵荡、横荡和艏向三个方向的滤波效果如图2-图4所示。
根据实船测试数据计算可以得出,纵荡、横荡和艏向三个方向的估计误差均值为:0.1036、0.1484、0.0609;而纵荡、横荡和艏向的估计误差标准差为:1.2101、1.2014、0.8003。由图2-图4可以看出,纵荡、横荡和艏向的估计误差均值和标准差可以得到,和实船测试数据几乎一致。
结论
根据Sage-Husa自适应滤波以及强跟踪卡尔曼滤波算法各自的特点,构造新的自适应滤波算法,解决海洋工程船舶动力定位的滤波问题。新的自适应滤波算法提高了滤波精度以及稳定性,通过和实船测试数据的对比,两者几乎一致,但是由于在建立船舶模型时存在一定的偏差,导致两者之间的结果有一定的差别。
参考文献:
[1] T. I. Fossen. Guidance and Control of Ocean Vehicles[M]. Antony Rowe Ltd, 1994.
[2] 王宗义, 肖坤, 庞永杰, 李殿璞. 船舶动力定位的数学模型和滤波方法[J]. 哈尔滨工程大学学报, 2002, 8(23):24-28.
[3] T. I. Fossen. Marine Control Systems: Guidance, Navigation and Control of Ships, Rigs and Underwater
Vehicles. Trondheim[M]. Norway: Marine Cybernetics, 2002.
[4] 袁伟,俞孟蕻,杨奕飞. 工程船动力定位系统滤波器设计与研究[J].船舶工程, 2014,36(1):63-65.
(第一作者单位:海洋石油工程(青岛)有限公司,第二作者单位:大连海事大学航海学院)
