可平移式老年转移床及其控制系统
朱丽 刘谋德 马依炜 章张江 李兵 魏玉兰

摘 要:为了便于卧床老年人安全转移,针对床板的移动设置了电动和手摇两种模式。实现了床板的左右移动,到指定位置停止,突发情况急停,可控移动速度等功能。经试验研究,该系统更人性化、安全化。
关键词:手摇;电动;急停;限位
1 绪论
本项目从老年人入手,针对更换床位过程繁琐,过程容易造成二次伤害,我们对老年人的起居进行研究,运用机械设计的方式,设计一款可平移式老年转移床。D.B Forster等人采用电动遥控控制护理床,床体可变形成轮椅藏于床内。[1]但整体设备体积庞大,对于空间存放要求高。黎世勤等人设计的床与气垫组合成一个有机整体,充气时,床头可以自动抬高,易于保护老年人肢体摆放。[2]桑凌峰等人研究的是轮椅与担架为一体用于转移老人的床。[3]张世旭等人对搬运人体采取了吊臂升降抓取转移。[4]没有考虑到搬运过程中,采用抓取动作是否会对老年人的身体造成不必要的伤害。本组设计区别于国内外运用先进技术、造价高的局限性,具有创新性和造价低的特点。
2 结构设计与工作原理
2.1 床板平移至转移升降板上
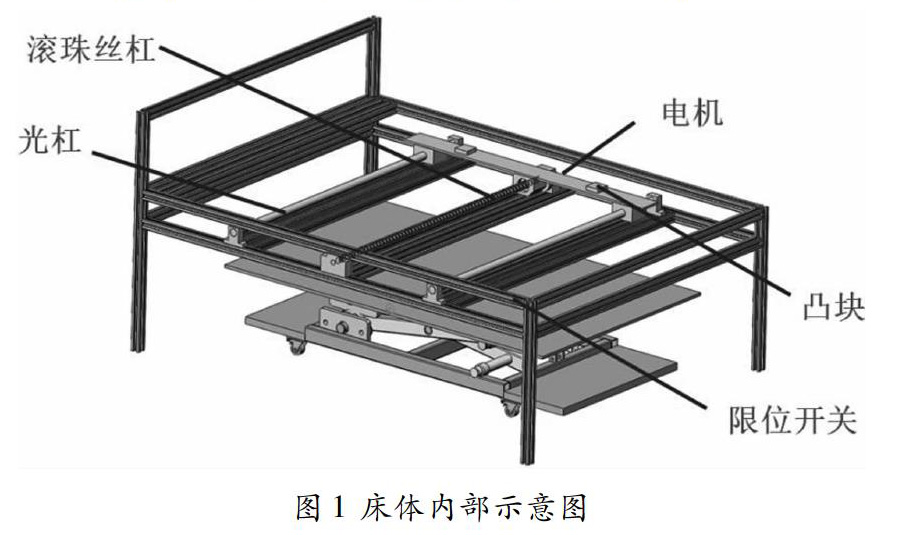
床架中间放置一根滚珠丝杠,其两侧放置光杆。其中滚珠丝杠起主运动作用,光杠起导向作用,避免移动位置偏移。(如图1所示)滚珠丝杠与光杆的滑块连接在同一块工作台上。电机在锥齿轮的啮合下带动滚珠丝杠上的螺母移动,螺母与工作台相连,利用工作台上的凸块与床板下的凹块配合,推动床板向转移升降平台移动。由此实现平移功能。待床板移动到极限位置触碰限位开关时,电机停止转动。转移升降板抬升,使配合的凹块与凸块分离,移出床板。
2.2 床板转移
转移升降板从床底拉出,通过液压系统控制上升至与床同高。待床板移到升降转移床上之后,利用快速定位夹固定,再次抬升至凹凸块脱离,然后将升降转移床推至目的地。仅靠单独的转移床就能实现将老人从主床上抬起后转移的功能。
3 控制原理
3.1 手动控制
在滚珠丝杠靠近电机一侧装有手轮,在停电时,摇动手轮,带动丝杠转动,使转动化直线运动,也可将床架盖板水平手动摇出。简单方便,可自由控制平移速度。
3.2 电机控制
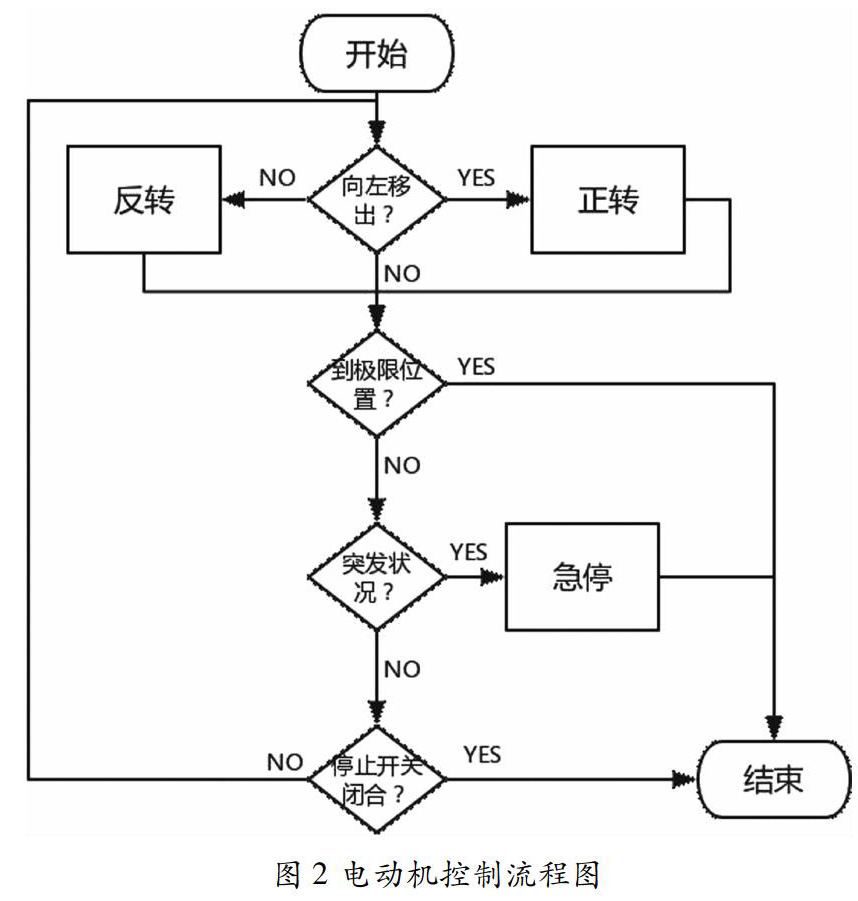
可平移床架盖板式老年护理转移床的平移方向是通过电机正反转来执行的。其速度可利用电机调速器改变档位控制快慢。控制流程图如图2所示。
3.3 执行控制回路的设计
为了减小机械冲击,使电路出现断开短路电流过大的可能概率降低并提高容错率[5],在设计控制部分时达到控制互锁,结合急停按钮、电动式按钮、限位开关的合理使用,实现电机起动与正反转等功能,在电路的完善程度方面,做到了兼容并蓄能够使得可利用价值和持续使用时长上有所改进。[6]控制回路原理图3所示。
按下正向工作按钮SB2,接触器KM1接收电路中电流得电,使得衔铁受力吸合并自锁。以齿轮装配的减速部件和交流电机组装成的交流减速电机启动,电机转子逆时针运动,可平移床板缓缓移出。当一种以PVP材料制成的方形工作平台运行至终止工位时并触发终端ST1时,ST1上的电磁铁断电,衔铁松开,KM1常开触点闭合,时间继电器KT1工作,一定时间后其双稳态触发器延时闭合,常开触头合拢,KM2线圈得电产生电流的磁效应吸合并自锁,电机转子在相反电流方向下反向旋转,可平移床板沿着工作路线返回,当工作台撞击起点端ST2时,ST2上的常闭触头在物理层面断开,随即KM2线圈电路不得电,令其常开触头闭合,半导体式时间继电器KT2在控制电路中开始工作,控制常闭触头在该方向上断开,电路中的电流无法流通,电路随即停止工作。需要停止时,按下停止按钮SB1。其中ST3,ST4为左右限位行程开关,用于防止超过左右限位。[5]
4 主床板运动电机选择
4.1 电机功率
5 结论
本文描述的可平移式老年转移床与传统的护理床比,本系统设计更人性化、智能化。采用转移升降板在液压系统的控制下进行抬升与此同时利用滚珠丝杠定向平移床板的方法,转移行动不便的卧床老人至医院,实现自动化控制。项目的作用符合当今社会的人道主义精神和满足对弱势群体的人文关怀。
參考文献:
[1]Foster D B,Caldwell H,Harris K,et al.Multiple position adjustable day night patient bed chair:US,5230113[P]:1993-07-27.
[2]黎世勤,李炎,吕晓娟.老年人居家护理床的研制和应用[J].护理学报,2017(7).
[3]桑凌峰,傅建中,甘中学,等.轮椅担架一体化护理机器人设计[J].机械设计与研究,2018(5).
[4]张世旭,颜红,张沪平.新型医用床搬移装置的研制与应用[J].护理学杂志,2005(10).
[5]任胜杰.电气控制与PLC系统[M].北京:机械工业出版社,2017:44.
[6]江豪,王威,刘永平.多功能护理床的研究与开发[J].微计算机信息,2006,22(20):117-119.
基金项目:国家级大学生创新创业训练计划项目(项目编号:201910347033)
*通讯作者:魏玉兰(1980—),女,河北邢台人,博士,讲师,主要研究方向为机器人运动及振动控制、图像处理与模式识别。
