全波形激光雷达系统设计方法研究
摘 要:全波形激光雷达对目标回波信号进行完整记录和分析,具有测距精度高和目标特征提取丰富的优点。但现有商业全波形激光雷达价格较高,而且内部硬件和软件高度保密,很难满足科研工作更深入更灵活的需求。本文提出了一种全波形激光雷达系统设计方案,利用实验室常用的数字示波器和信号发生器,搭建出一套结构紧凑且经济可行的全波形激光雷达实验装置。
关键词:全波形激光雷达;共光轴光学系统;多功能示波器
一、绪论
全波形激光雷达是激光雷达的最新发展方向,可对目标回波信号进行完整记录和分析,具有测距精度高和目标特征提取丰富的优点,在测量测绘和数字化城市等领域具有重要的应用价值。由于全波形激雷达涉及复杂的光机电综合技术和高速采样与存储技术,现有研究工作主要使用商品化全波形激光雷达产品采集数据[1],集中在后期波形处理和数据应用方面[2-3],无法很好的实现仿真分析—算法实现—实验验证的全方位闭环研究[4]。本文给出了一种结构紧凑且经济可行的全波形激光雷达设计方案。
二、系统框架图
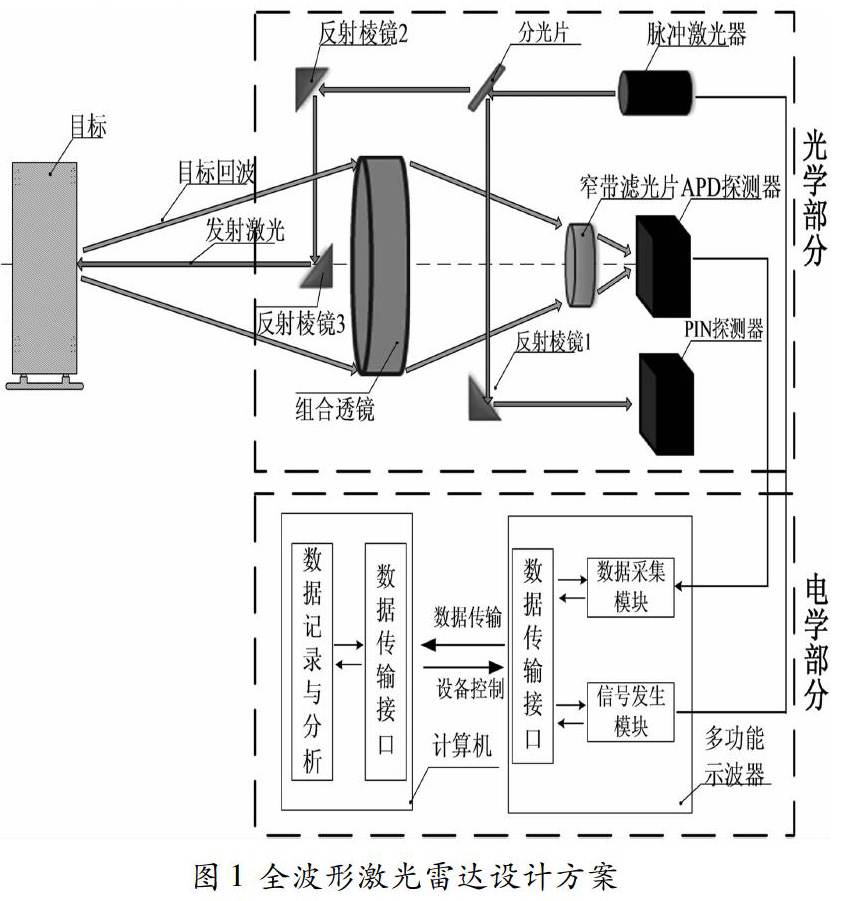
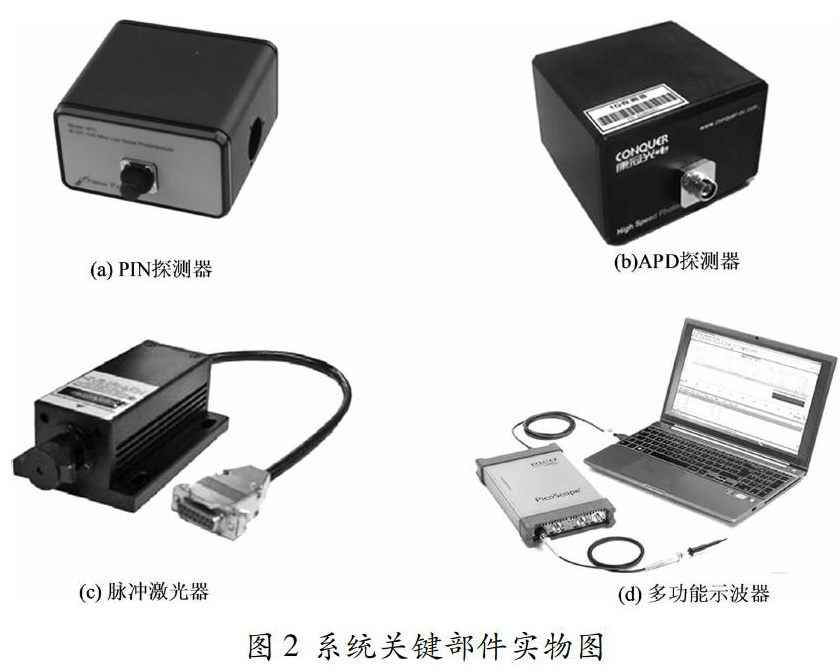
如图1和图2所示,全波形激光雷达方案主要由光学部分和电学部分组成:①光学部分,负责激光发射、接收与光电转换功能,主要包括脉冲激光器、光学元件以及光电探测器等;②电学部分,负责激光器触发控制、光电探测器信号采集与处理功能,主要包括信号发生模块、数据采集模块、数据同步模块、数据传输接口以及波形记录与分析等。
三、系统工作流程
光学部分采用发射-接收共光轴透射式望远镜结构,激光发射与接收过程:脉冲激光器发射的激光脉冲(波长1064nm,脉宽10ns,峰值能量20uJ,发散角1.0mrad),经分光片分光(@1064nm,透过率94.5%,吸收率5%,反射率05%),其中05%激光能量经反射棱镜1入射到PIN探测器(铟镓砷材料,响应波长900-1700nm,带宽125MHz,电流增益40V/mA)光敏面上,光电转换得到发射信号,剩余的945%激光能量经反射棱镜2和反射棱镜3依次反射后照射到目标表面,形成激光脚斑。激光接收过程:目标激光脚斑产生后向散射激光回波,其中一部分回波经组合透镜(低分散的冕牌玻璃正透镜和高分散的火石玻璃负透镜粘接而成的消色差透镜,且镀有1050-1620nm增透膜)汇聚到APD探测器(铟镓砷雪崩二极管探测器,响应波长800-1700nm,带宽200MHz,增益1.4×104V/W)光敏面,光電转换得到目标回波信号。
电学部分利用一台PICOSCOPE公司的PICO6404D型多功能示波器和一台计算机,实现激光器触发控制、波形数据采集、数据传输、波形记录与分析等一体化解决方案。PICO6404D型多功能示波器小巧易于携带,集成了任意信号发生器和数字示波器。内置的信号发生器,不仅可以产生正弦波、三角波和方波等波形,还支持用户自定义波形数据;内置的数字示波器具有4个模拟通道,500MHz模拟带宽以及最高5Gsa/s实时采样率,内置2GB超大容量缓存,通过USB3.0接口以高达150Mbps将采集到的波形数据传输到电脑。
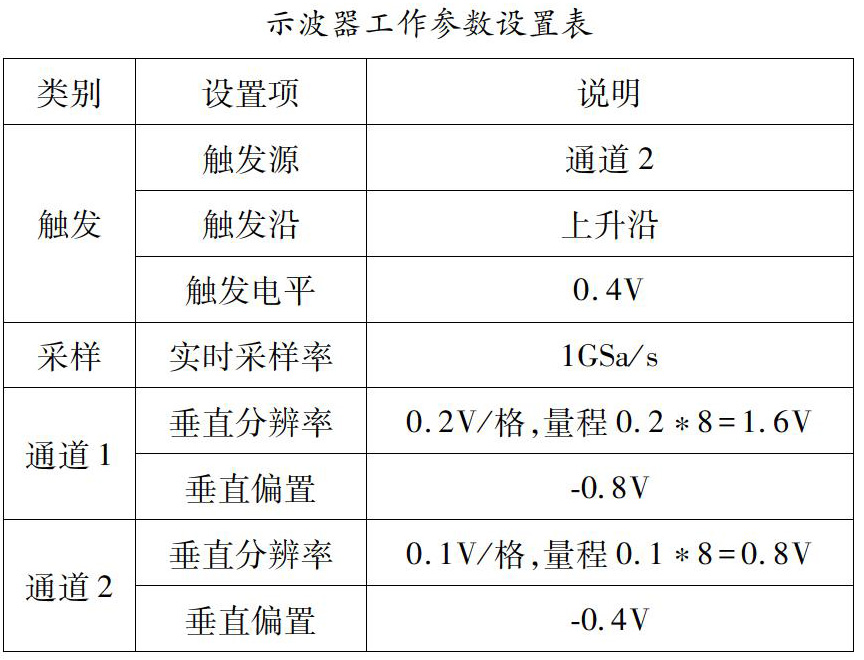
电学部分工作流程为:使用上位机设置PICO6404D型多功能示波器的信号发生模块,产生方波信号(TTL电平类型,频率5KHz,占空比82%),触发脉冲激光器同步产生5KHz的脉冲激光;如下表所示设置多功能示波器的数据采集模块(假设PIN探测器接到通道1,APD探测器接到通道2),采样率设为1Gsa/s,触发方式选择通道1上升沿触发。由于发射信号的峰值较为稳定,设置固定触发阈值,即可同步采集通道1和通道2的波形数据。当达到设定的采样点数后,一次采集周期结束,并自动开始下一周期的采集。多功能示波器将采集到的波形数据上传到上位机,上位机接收到数据后保存到上位机硬盘。利用Matlab实现波形分解算法,处理硬盘里保存的实验目标波形数据。
采样点数以及采样率决定了激光雷达的最大测量距离以及数据传输所需要的速率。假设采样率为1Gsa/s和采样点数为1400,则对应的最大测量距离为:(1400bins×1ns×3×108m/s)/2=210m,对应的最大数据传输速率:1400bins×5KHz×8bits×2通道=112Mbps。因此,本文提出的系统设计方案,采集到的重叠目标的回波如图3所示,可以满足近距离小光斑全波形激光雷达的波形采集与分析需求。
四、结语
本文提出了一种全波形激光雷达设计方案,该方案主要由光学和电学两部分组成。光学部分采用发射-接收共光轴设计,具有结构紧凑的优点。电学部分采用一台多功能示波器和一台计算机,实现激光器驱动、目标回波信号同步采集和数据采集与分析等功能。
参考文献:
[1]Hug C.,Ullrich A.,Grimm A.Litemapper-5600-a waveform-digitizing LiDAR terrain and vegetation mapping system[J].International Archives of Photogrammetry,Remote Sensing and Spatial Information Sciences,2004,36(Part8):25-29.
[2]程华.激光雷达回波信号处理技术研究[D].成都:中国科学院光电技术研究所,2015.
[3]骆社周.激光雷达遥感森林叶面积指数提取方法研究与应用[D].北京:中国地质大学,2012.
[4]赵明波,何峻,付强.全波形激光雷达回波信号建模仿真与分析[J].光学学报,2012,32(06):246-259.
基金项目:国家自然科学基金(61701266)
作者简介:陈瑞强(1983—),男,汉族,河北石家庄人,工学博士,淮阴工学院电子信息工程学院讲师,主要从事光电技术研究。
