浅谈船舶压载水自动调平系统的应用和管理
摘要:船舶压载水的自动调整,是提高船舶稳性、安全航行、施工效益和船舶安全的重要环节。本文主讲船舶压载水自动调平系统的主要功能、基本要求、压载水调平系统应用、操作、管理,以提高船舶压载水管理水平,保证船舶工作安全可靠。
关键词:船舶压载水系统 自动调平 应用 管理
0概述
船舶在设计和建造上除了满足船舶规范下的该船舶的用途和功能外,还应该满足船舶处在水上平衡漂浮的理想状态。但是无论在设计上再完善,建造上再优质,当船舶实施货物装卸载、水上施工作业或航行中环境气候等影响时都会失去平衡,一些船舶发生的重大事故就是因为过度失去平衡所造成的。无论是海上担负各类货物运输的船舶(如:集装箱船、散货船、油轮、化学品船、液化气船等),还是参与港口建设、海洋工程的船舶(如:挖泥船、起重船、海上风电安装船、海洋工作船、海洋科考及海上生活补给船等),在实际的施工作业或航行中必须采取措施对船舶进行必要的平衡调整,使船舶既安全又高效地满足生产需要。船舶平衡调整是一项非常严谨的工作,在调整过程中,要进行计算和实际观测,有时需要持续调整,从平衡到不平衡,又从不平衡到平衡来满足船舶生产和安全要求。
如何达到平衡呢?最有效的方法就是船舶设立压载水系统,它是一个以水为介质的可移动压载系统,在船舶设计上被广泛采用而不可缺少的手段,船舶建造规范都有专门规定。船舶采用压载水系统的特点是简单、方便、快捷;一是压载水就地取材,取之不尽;二是注入和排出方便,适用于现场控制和遥控操作;三是迅速及时,可控性强;四是满足大容量快速调平,可以设置对应平衡水舱。
1 压载水系统的主要功能
船舶设置压载水系统可对船舶各压载水舱按需要实施注入或排出,有效调控船舶,在不同装卸条件、航行区域、施工环境、作业要求、气象影响、紧急救险等维持船舶稳态,确保船舶安全,具体的调控功能如下:
(1)保持船舶适当的排水量,吃水深度;
(2)调整船舶的纵倾度或横倾度;
(3)维持船舶恰当的稳性高度和船舶稳性;
(4)减少船体变形引起的弯曲力矩和剪切力;
(5)海损事故中的自身应急救助。
船舶压载水在设计上,通常按照船舶的稳性计算对压载水舱进行分隔,满足船舶各种装载状态下的调整,并且用管路联通。
2船舶压载水系统的基本要求
每艘船的压载水系统都是由该船舶的性质、用途、大小、航区等来决定的,在实船布局上必然存在差异,但必须都要满足船舶建造规范要求。
船舶的压载水系统包括如下几个部分组成:
(1)压载水舱:根据设计稳性计算与压载水调平要求设计,设立艏尖舱、艉尖舱和若干个左右压载水舱,有的船舶设置平衡压载水舱(起到了调平速度快,节约能源,防止水体污染)。压载水舱所处的部位、容量和舱的数量都经过严格计算确定,一般多设置于船舶双层底,设计最终送船级社审图中心核准通过。
(2)管路系统:每个压载水舱设置连接管系,压载水进出管系根据需要可以是共用也可以分设,但必须利用阀门实施有效控制,压载水管通径要匹配泵排量和压载水排出注入的时间要求。
(3)系统控制阀门:实现控制压载水舱水的注入和排出,阀门布置相对集中便于操作,阀门上做好标记。阀门分手动控制和自动遥控,自动控制阀门有气动、液动、电动,常用的为气动遥控,阀门设有遥控开启位置显示。
(4)压载水泵:压载水泵一般设立二台以上(有的船舶设一台,另设有总用泵或消防泵替代),泵的排放容量在设计中按舱容及注入、排出需求时间来确定,满足一定的调拨时间要求。泵的控制可以是就地控制也可以遥控。
(5)遥控系统:系统设置遥控控制面板,计算机输入接口,对船舶自动平衡数值进行整定,对控制方式可以转换操作、带压载舱液位显示和失效报警。
(6)传感器:设在压载水舱内,由过去的人工测量到浮子式、压差式显示发展到现在的远程传感显示,精确度高,反应灵敏,是实现自动化控制系统的重要元件。
3船舶自动调平系统应用(以上海迈领自控科技发展有限公司生产的设备为例)
早期压载水系统的管理是由人工完成的,甲板部负责压载水舱的测量、记录,发布调拨指令。当需要调拨压载水时,甲板部负责此项工作的专人通知轮机部调拨压载水,明确调拨水舱的进出量要求,轮机部专人执行开阀、开泵操作,甲板部专人不断对压载水舱测量,当船舶调平到位置时,通知轮机部停止驳运,轮机部执行停泵关阀。这种操作劳动强度高,调拨精度差,也会发生错误,还会出现二部门矛盾,存在着一定的安全隐患。
随着科学技术的发展,自动化程度的提高,高精度测量和控制元件的问世,有针对性的自动化控制系统研发和应用,逐渐取代了繁琐及高强度的人力操作,既解放了劳动力,又提高了安全性。船舶自动平衡系统也就这样被成功研发并广泛应用。
(1)自动调平的方式
船舶自动调平系统在功能设计上要求操作简单、稳定可靠、适应操作人员有效操作。其方式是通过横倾(纵倾)传感器采集的信号源,比较判断横倾(纵倾)程度是否超过设置值。在自动状态下,如果横倾(纵倾)值超过设定值范围,系统就会发出信号并自动启动运行,开启相关阀门,启动相关压载水泵组,调节相关2个或多个平衡水舱量达到平衡;在手动状态下,通过操作MINIC板旋钮,控制开关阀门和水泵;另外,可将液位数据(4个平衡压载水舱和4个吃水)也引入横倾(纵倾)装置,并通过吃水计算后得到的横倾(纵倾)值和横倾(纵倾)传感器采集的数值进行比较,判断系统是否平衡正常,进一步增加了系统的可靠性和精确性。
(2)自动调平系统的操作权限
为使系统有效可靠工作,在多模式控制下设定操作权限,一般系统设有4种操作权限,分别是:就地操作权限;MINIC操作权限;触摸屏手动控制权限;触摸屏自动控制权限。
在实际操作中以MINIC板操作为主,其他为辅。
a.就地操作:把控制柜上的“遥控/就地”开关打到“就地”位置,实施现场操作。
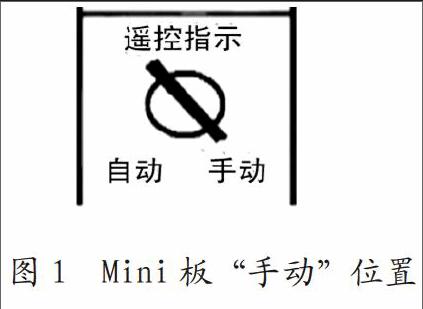
b.MINIC板操作:无通信故障,控制柜的“遥控/就地”开关转到“遥控”位置,把MINIC板“手动/自动”开关打到“手动”位置。如图1所示:
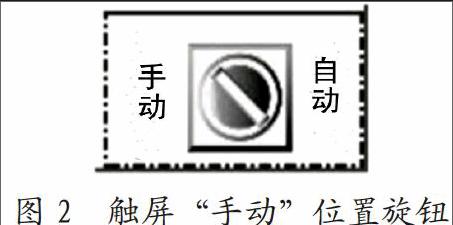
c.触摸屏手动控制:无通信故障,控制柜的“遥控/就地”开关打到“遥控” 位置,MINIC板“手动/自动”开关打到“自动”位置,并将触摸屏上“手动/自动”开关打到“手动”位置。如图2所示:
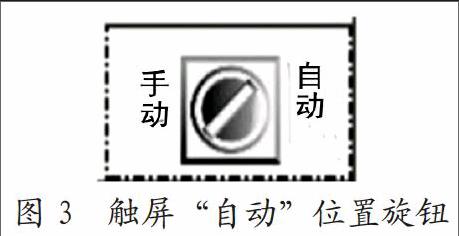
d.触摸屏自动控制:无通信故障,控制柜的“遥控/就地”开关打到“遥控” 位置,MINIC板“手动/自动”开关打到“自动”位置,触摸屏上“手动/自动”开关打到“自动”位置。如图3所示:
(3)自动调平系统的操作方式
自动调平系统在操作方式上简单、可靠,在设定的四种操作权限下选择,按实际需要相应转换:“就地”操作为一般的控制方式现场操作;“MINIC板”操作为主要的自动控制方式操作;“触摸屏手动控制板”作为“MINIC板”旋钮或泵启停旋钮损坏的情况下使用,也称为辅助操作;“触摸屏自动控板”是当操作权限切换到触摸屏自动控制前,在触摸屏上面将需要设定的相关参数预先输入。相关参数的设置程序如下:首先进入参数设置主页面;
如图4所示:“参数设置主页面”进入参数设置主页面:
点击“参数设置3”,弹出页面“用户权限登录”的等级密码,输入123456和ENTER,如图5所示:
进入“参数设置3页面”,如图二所示,当选择“NO.1泵优先”,则系统首先选择NO.1泵,在NO.1泵发生故障,系统会自动切换到NO.2泵;当选择“NO.2泵优先”则系统首先选择NO.2泵,在NO.2泵发生故障时,系统会自动切换到NO.1泵;当选择“横倾优先—倾斜仪”时,系统则以倾斜仪的数据作为调平依据;当选择“横倾优先—PLC”时,系统以PLC计算的数据作为调平的依据。
系统的操作方式和设置均可以方便地选择,达到了优化的程度。
(4)自动平衡系统调平过程的应用 (以典型起重船例)
只有当操作权限在触摸屏自动控制状态下,系统检测到数据没有违反前述参数设置程序;系统所属部件无故障,系统才能进行自动调平。所属部件包括:倾斜仪、检测设备、控制系统设备、系统的通信信号和电源、各平衡舱传感器、船舶左右(前后)吃水传感器、平衡舱水进出遥控阀BWV60\BWV61\ BWV62\BWV63、 水泵吸口遥控阀BWV50\BWV53\ BWV56\BWV58、水泵出口遥控阀BWV52\BWV55\ BWV57\BWV59、控制遥控阀启闭设备装置(空气、液压、电动系统设备),单向截止阀BWV51\BWV54(常开)、压载水管路系统、NO.1(NO.2)压载调倾水泵等完好。
见“自动平衡调平系统示意图示”(图6):
a.系统处在正常准备状态下,关闭所有阀门,关闭所有水泵。当系统检测到船舶左倾超限(整定值)时,自动开启阀门工作,打开BWV50(BWV53)、BWV52(BWV55)、BWV60、BWV61遥控阀后,启动水泵NO.1(NO.2),水可以顺利从左平衡舱调入右平衡舱。同理,当系统检测到船舶后倾超限(整定值)时,自动开启阀工作,打开BWV50(BWV53)、BWV52(BWV55)、BWV62、BWV63遥控阀后,启动水泵NO.1(NO.2),水可以顺利从后平衡舱调入前平衡舱。
b.系统处于正常准备状态下,关闭所有阀门,关闭所有水泵。当系统检测到船舶右倾超限(整定值)时,自动开启阀门工作,打开BWV56(BWV58)、BWV57(BW59)、BWV60、BWV61遥控阀后,启动水泵NO.1(NO.2),水可以顺利地从右平衡舱调拨入左平衡舱。同理,当系统检测到船舶前倾超限(整定值)时,自动开启阀门工作,打开BWV56(BWV58)、BWV57(BW59)、BWV62、BWV63遥控阀后,启动水泵NO.1(NO.2),水可以顺利地从前平衡舱调拨入后平衡舱。
c.若前后左右平衡压载舱为空舱或满舱时,此时船舶需要增减吃水线和调平船舶平衡时,各压载水舱需从船外打入压载水或打出压载水舱压载水进行调整;如:打开BWV64(BWV65)遥控阀,通过压载水自动调平系统设备的操作或其他相应操作,可将船舶舷外的水打入到所需的压载舱内;反之打开BWV66(BWV67)遥控阀,通过压载水自动调平系统设备的操作或其他相应操作,可将所需的压载舱内的压载水打出到船舶舷外。以此调整船舶的平衡和吃水线,提高船舶安全稳性。
d.当一组线路故障(BWV50、BWV52、BWV56、BWV57遥控阀、NO.1水泵,以及控制系统出现故障)或另一组线路故障(BWV53、BWV55、BWV58、BWV59遥控阀、NO.2水泵机控制系统出现故障),或者BWV60\BWV61\BWV62\BWV63平衡舱遥控阀出现故障,则系统无法实现自动模式。在这种情况下通过操作权限转换手动控制。
5船舶自动平衡调平系统的管理
船舶应建立和完善船舶压载水自动平衡调平系统的操作规程,制订相关设备的应急措施,制订系统设备的年、月、日的检查、使用、保养、修理的计划和实施记录管理台账。做好相关管理台账的记录和相关的制度。
保持船舶自动平衡调平系统正常运行,注重系统的养护和管理十分重要,按计划对系统及辅助设备作必要的检查、核对、保养、管路,确保其工作的精度。
主要包括以下几个方面:
(1)压载水系统主要设备和遥控检测设备的检查和管理
a.定期检查压载水舱、管系、阀件是否完好,防止水舱道门、管路、法兰连接处漏水。
b.定期清洗压载水滤器及部分管路去除海蛎子等杂物。
c.检查水泵运行平稳情况,特别注意轴承声响、振动和温度,及时消除轴封漏水;检测水泵运行中吸排压力指示和流量仪器是否正常;定期校对现场水泵的温度、吸排压力、流量指示与监控操作室系统监控显示屏内参数相符。
d.检查管路控制阀件启闭是否正常,定期加油活络保养;检查阀门关闭密封性是否良好;核对阀门启闭指示器位置是否正确,是否与遥控系统显示屏指示位置相对应。
e.定期检查压载水舱水位传感器信号与人工检测压载水舱的水位及液位指示是否相符和正常,了解测试值与整定值的对比计算。
f.定期检查压载水泵、阀门、遥控设备、监控设备是否正常。
g.定期检查遥控系统和辅助的摄像监视器设备是否正常,以便及时发现问题和及时解决问题。
(2)对遥控阀控制动力源设备的(常用压缩空气、液压油、电力为动力源)检查和管理
如船舶在零度以下寒冷环境时,需做好船舶设备的防冻保暖工作;
a.在零度以下寒冷环境时,对控制压缩空气管路、气阀需用保暖材料包扎,并在保暖层材料间加装电热丝保温,防止控制空气管路内的水汽结水或结冰,特别是在空气管路底部的管路、底部弯头、接头处容易堵塞控制空气管路,发现问题及时疏通处理。
b.定期检查和养护控制空气干燥净化装置,确保设备正常;防止控制压缩空气杂质、水分、油腻堵塞控制空气管路;特别是在空气管路底部管路、底部弯头、接头处容易堵塞控制空气管路;发现问题及时疏通处理。
c.定期对控制压缩空气瓶放泄瓶内残油、水等异物,净化空气。
d.定期检查控制空气管路,防止管路碰坏处、接头出漏气;发现问题及时解决。
e.在零度以下寒冷环境时,对液压油控制管路也需要用保暖材料包扎,并在保暖层材料间加装电热丝保温;防止液压油黏度增大,流动性差,造成遥控不灵敏。
f.定期检查液压油控制管路,防止管路碰坏处、接头出漏油;发现问题及时解决。
g.平时要确保液压油无杂质和水分,必要时要进行除水、除杂质过滤工作。
h.对电力为动力源的控制电气设备,要定期检查电气设备的绝缘,特别在高温高湿环境,做好电气设备的防水、防潮湿工作,注意控制电机是否有异常声响、振动和温度偏高等现象。
(3)压载水的管理
a.对压载水外排时,严格遵守海事局制定的特定区域压载水排放规范要求排放,以及压载水处理后按标准排放。
b.定期清除压载水舱内的污泥等杂物。
c.按压载水管理条例和操作规程等制度管理使用、操作压载水,既要满足船舶工作需要,又要满足压载水的管理条例并确保船舶的安全。
6 结语
总之,只要我们船舶管理人员认真负责和善加总结,一定会把更多更好的方式方法应用到实际船舶管理中去,以提高船舶压载水管理水平。
参考文献
[1]上海迈领自控科技发展有限公司船舶自动调平系统控制及资料.
