基于虚拟仪器与PCI—1711U的三轴滑台控制系统设计
张新良+马明全

摘要:介绍了一种基于虚拟仪器技术和PCI-1711U控制卡的三轴滑台控制系统设计方案,利用控制卡的数字量输出功能,产生控制步进电机的脉冲信号,控制转动角度和速度。使用虚拟仪器LabVIEW作为开发工具,利用多线程并行运行机制和数据采集DAQ函数,分别为各自由度上的电机控制分配线程,实现控制矢量的输出,克服了传统步进电机控制系统编程复杂不易修改的困难。结果表明,基于虚拟仪器和PCI-1711U控制卡的滑台控制系统能实现三维空间中,点到点的定位。此系统可应用于3D打印、智能数控机床等领域,为三维空间中运动的控制提供了一种设计方法,相比于传统控制方法具有优势。
关键词:三轴滑台;虚拟仪器;PCI-1711U;步进电机;多线程
DOIDOI:10.11907/rjdk.172223
中图分类号:TP319
文献标识码:A文章编号文章编号:1672-7800(2018)001-0102-03
Abstract:A control system is proposed for an XYZ 3-axial sliding table driven by step motor in this paper. A PCI-1711U control card is adopted for the generation of the PWM to control the angle and rotation velocity of the motor through its digital output interface. Meanwhile, the virtual instrument software, i.e. LabVIEW is introduced for the construction of the control system. The capability of multi-thread parallel operation mechanism and Data-Acquisition (DAQ) function is utilized to generate respective control vectors for the step motors simultaneously, overcome the difficult of traditional stepper motor control system programming complex and not easy to modify. The experimental results have shown that the sliding table control system based on virtual instrument and PCI-1711U control card can achieve point-to-point positioning in three-dimensional space. This system can be applied to 3D printing, intelligent CNC machine tools and other fields. It provides a design method for motion control in three-dimensional space. It also gives a more friendly and intuitive interface compared to the traditional control systems.
Key Words:3-axis sliding table; virtual instrument; PCI-1711U; step motor; multi-thread
0引言
步进电机直接将数字脉冲信号转化成为角位移或直线位移脉冲信号,作为控制电机和驱动电机使用时具有转子惯量低、定位精确度高、控制简单等特点,因此步进电机在精密仪器、医疗器械、半导体加工等诸多领域具有广泛应用价值[1]。傳统的步进电机控制主要是基于处理器的,如单片机[2]、可编程逻辑控制器(PLC)[3]、DSP[4]等设备,这些设备往往存在电路灵活性差、不易调整、编程复杂、稳定性差等不足。本文研究使用PCI-1711U数据采集控制卡实现对三轴滑台步进电机的开环控制,利用其独立的处理器、带缓冲隔离、总线主控以及即插即用的特点,克服传统步进电机控制方案的不足[6]。同时,利用图形化编程语言的虚拟仪器LabVIEW技术,设计开发控制系统的上位机及控制算法,提高系统的编程灵活性和系统的稳定性。
1三轴滑台运动控制系统
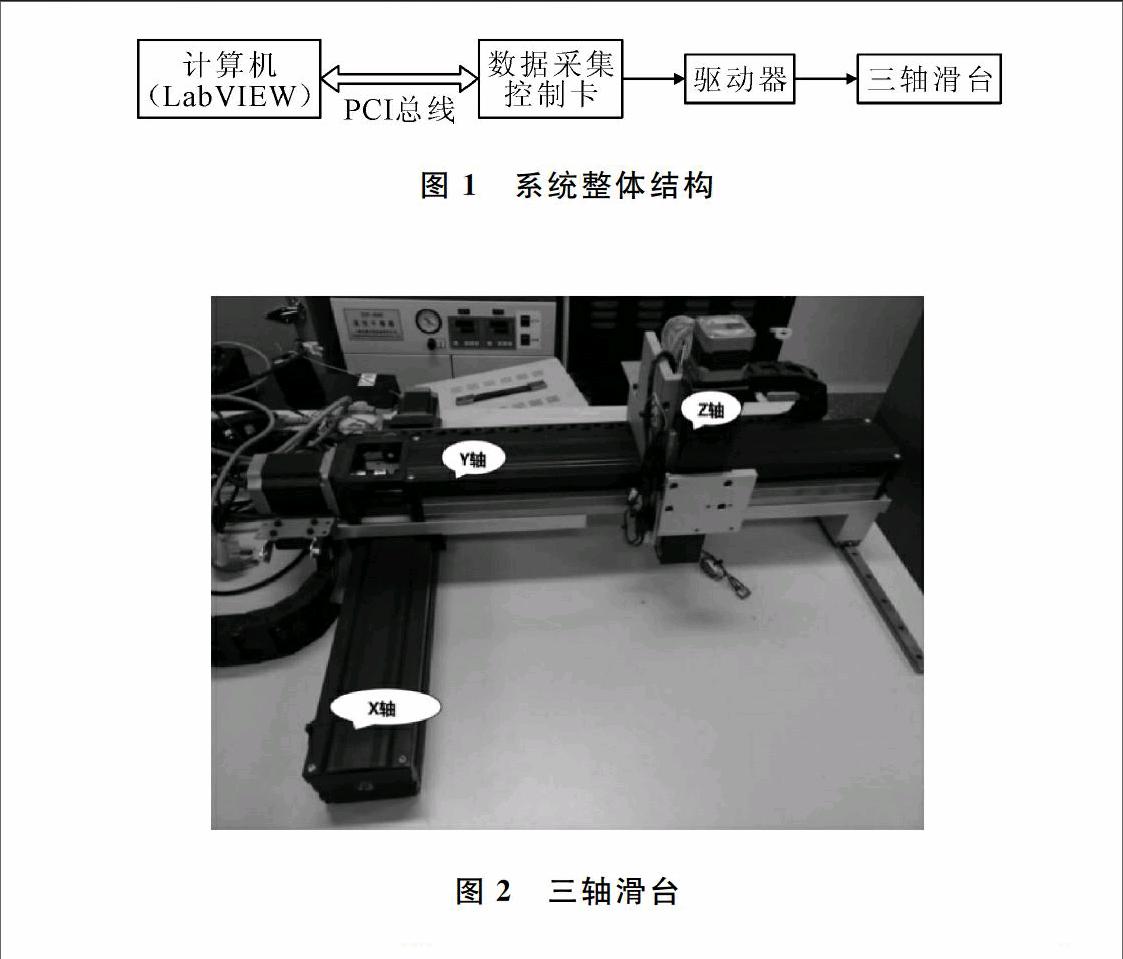
三轴滑台运动控制系统的整体框架如图1所示。此系统以步进电机作为驱动设备,上位机控制器根据预期指令控制目标,产生决策命令并生成控制矢量,控制PCI-1711U控制卡输出脉冲信号送给电机驱动器,控制步进电机按照期望动作。系统的控制可以是开环控制或闭环控制,也可以是速度或位置控制。
2系统硬件设计
2.1步进电机及驱动器
三轴滑台经步进电机驱动,丝杆机械传动,控制其在三维空间中运动,如图2所示。步进电机为PK-569-A高转矩低震动五相步进电机,基本步距角为0.72°,可使用驱动器进行2细分,半步进驱动方式步距角为0.36°。XYZ轴的丝杆导程分别为20mm、20mm和2mm,步距角和丝杆导程可为实现开环定位提供计算依据[3]。
步进电机驱动器为SD528,有16种驱动电流,每相最高达1.4A。可接收单脉冲(1P)或双脉冲(2P)输入方式,和采用全步进(每步0.72°)或半步进(每步0.36°)驱动方式,驱动器接线如图3所示。驱动器脉冲输入方式为下降沿触发,即无脉冲信号输入时,维持高电平。双脉冲输入控制时,CW端的脉冲控制步进电机顺时针旋转,CCW端的脉冲控制步进电机逆时针旋转。单脉冲输入控制时,CW端脉冲控制步进电机转动的角度和速度,CCW端的高/低电平则控制步进电机的转动方向。本系统采用单脉冲输入方式,CW和CCW采用共阴极接线方式。
2.2PCI-1711U运动控制卡
PCI-1711U是研华公司生产的一款多功能PCI总线数据采集控制卡,其模块化仪器通讯总线具有最常用的测量和控制功能,如16路单端或8路差分12位模拟量采集输入(AI)、16路数字量输入(DI)、16路数字量输出(DO)、2路12位模拟量电压输出及可编程计数器/定时器功能。在本运动控制系统中,选取数字量输出端口DO4、DO7、DO3分别作为X轴、Y轴、Z轴的步进电机驱动器的CCW端口信号输入端口,通过控制三端口的高低电平输出,实现对XYZ三轴步进电机运动的控制。选取数字量输出端口DO2、DO5、DO1分别作为步进电机驱动器的CW端口脉冲信号输入端口,通过控制脉冲频率的高低,实现对步进电机转速的控制。
PCI-1711U控制卡进行硬件电路连接时,需要通过两端针型接口的68芯SCSI-II电缆,连接至接线端子板,如图4所示。本系统采用PCL-10168型双绞线电缆,模拟信号和数字信号分开屏蔽,从而最大程度降低信号干扰,并解决EMI/EMC问题。DIN导轨安装的接线端子板完成各种输入输出信号线的连接,其68个接线端子与控制卡一一对应。在后续工作中,还可以利用PCI-1711U采集控制卡的AI和DI端口,采集位移传感器及限位开关的信号,进一步完善控制系统。
3系统软件设计
在本系统中,使用虚拟仪器LabVIEW技术设计开发三轴滑台运动控制系统的软件系统[5],管理PCI-1711U采集控制卡的操作,提供用户和控制系统的接口。
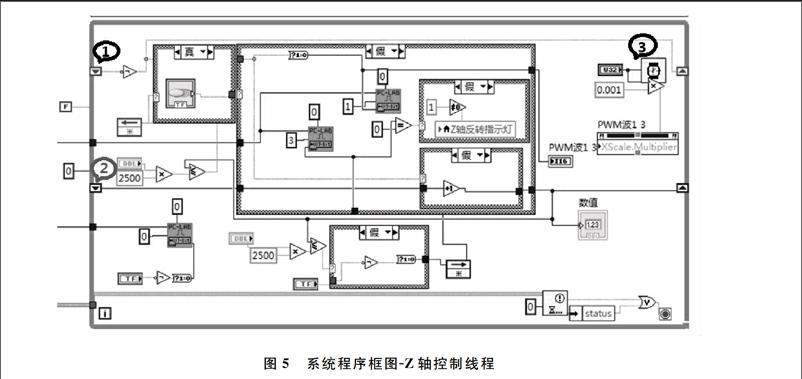
利用虚拟仪器的多线程同步技术,分别为XYZ轴上的步进电机分配控制线程,根据预期的控制目标,生成各自由度上的控制矢量。控制矢量经PCI-1711U控制卡的数字量输出端送入驱动器,控制步进电机的运动状态,实现:①通过控制步进电机来独立控制各自由度上点到点的运动;②各自由度上步进电机的加速、减速独立控制;③根据各自由度上设定的定位距离和转向距离,生成控制矢量(脉冲频率和个数),具有位置跟踪功能。设计的人机交互面板如图4所示,对应Z轴控制线程的程序如图5所示。
在程序实现上,利用移位寄存器和“布尔至脉冲转换.vi”生成PWM波并对脉冲计数,如图5的①和②处。通过调节定时器的定时周期来控制PWM波的频率,如图5中③处。进而,由PWM波的频率和个数变化来控制步进电机的转速和线位移[8]。程序中SelectDecivePop.vi、DeciveOpen.vi、DIO WriteBit.vi为PCI-1711U运动控制卡的LabVIEW函数,分别完成选择硬件设备、打开硬件设备和写硬件设备数字量并输出的功能。
对于滑台各自由度上的位置跟踪功能,可根据步进电机的步距角及丝杆导程计算生成控制矢量来实现。本滑台X、Y轴步进电机配套的丝杆导程为20mm,Z轴丝杆导程为2mm,步进电机的驱动器为全步进方式(步距角为0.72°),则X、Y轴的脉冲当量为D=20*0.72/360=0.04,Z轴脉冲当量为0.004。因此,若X轴移动40mm,则需要1 000步进脉冲,同理,可计算YZ轴的控制矢量数据。
经实验测试,所设计的三轴滑台控制系统运行稳定,可靠地实现了三维空间中,点到点的定位,且界面友好。另一方面需要说明的是,考虑到在本系统中PWM波的频率控制是利用Windows系统的定时器实现的,因此频率上限只能达到1kHz,对于频率要求更高的场合,可结合硬件资源,利用PCI-1711板卡的可编程定时器及虚拟仪器的定时循环结构来实现,此处不再赘述。
4结语
本文介绍了基于虚拟仪器LabVIEW和PCI-1711U运动控制卡的三轴滑台控制系统的设计。该系统摆脱了传统控制系统完全依赖处理器的缺點,编程简单、操作简便、系统操作界面直观友好。实验测试结果表明该系统达到了较好的控制效果,可靠地实现了三维空间中点到点的定位。此系统可应用于3D打印、智能数控机床等领域,为三维空间中运动的控制提供了一种设计方法。同时LabVIEW提供的强大函数库,可大大减少非计算机专业人员的开发时间,提高工作效率,相比于传统控制方法更具有优势。
参考文献:
[1]孙秀桂,赵兵.基于labVIEW的步进电机控制器的设计[J].大理学院学报,2008,7(12):68-71.
[2]张占立,康春花.基于单片机的步进电机控制系统[J].电机与控制应用,2011,38(3):28-31.
[3]王彦军,李增生.基于PLC的步进电机控制[J].科学技术与工程,2011,11(5):1707-1709.
[4]张宝发,赵辉,岳有军.基于DSP的步进电机控制系统设计[J].仪表技术与传感器,2010(8):63-65.
[5]陈方泉,李建周,马思文.基于LabVIEW的步进电机驱动设计及其应用[J].上海大学学报,2006,12(1):89-92.
[6]李进杰,高伟.基于LabVIEW的步进电机控制系统设计[J].机械与电子,2010(15):85-86.
[7]杨林,方宇栋.LabVIEW控制步进电机[J].微计算机信息,2004,20(2):7-8.
[8]曹卫彬.虚拟仪器典型测控系统编程实践[M].北京:电子工业出版社,2012:117-132.
[9]毛计庆.labVIEW——快速构建步进电机控制系统的利器[J].电机与控制应用,2009,36(1):30-32.
(责任编辑:刘亭亭)
摘要:介绍了一种基于虚拟仪器技术和PCI-1711U控制卡的三轴滑台控制系统设计方案,利用控制卡的数字量输出功能,产生控制步进电机的脉冲信号,控制转动角度和速度。使用虚拟仪器LabVIEW作为开发工具,利用多线程并行运行机制和数据采集DAQ函数,分别为各自由度上的电机控制分配线程,实现控制矢量的输出,克服了传统步进电机控制系统编程复杂不易修改的困难。结果表明,基于虚拟仪器和PCI-1711U控制卡的滑台控制系统能实现三维空间中,点到点的定位。此系统可应用于3D打印、智能数控机床等领域,为三维空间中运动的控制提供了一种设计方法,相比于传统控制方法具有优势。
关键词:三轴滑台;虚拟仪器;PCI-1711U;步进电机;多线程
DOIDOI:10.11907/rjdk.172223
中图分类号:TP319
文献标识码:A文章编号文章编号:1672-7800(2018)001-0102-03
Abstract:A control system is proposed for an XYZ 3-axial sliding table driven by step motor in this paper. A PCI-1711U control card is adopted for the generation of the PWM to control the angle and rotation velocity of the motor through its digital output interface. Meanwhile, the virtual instrument software, i.e. LabVIEW is introduced for the construction of the control system. The capability of multi-thread parallel operation mechanism and Data-Acquisition (DAQ) function is utilized to generate respective control vectors for the step motors simultaneously, overcome the difficult of traditional stepper motor control system programming complex and not easy to modify. The experimental results have shown that the sliding table control system based on virtual instrument and PCI-1711U control card can achieve point-to-point positioning in three-dimensional space. This system can be applied to 3D printing, intelligent CNC machine tools and other fields. It provides a design method for motion control in three-dimensional space. It also gives a more friendly and intuitive interface compared to the traditional control systems.
Key Words:3-axis sliding table; virtual instrument; PCI-1711U; step motor; multi-thread
0引言
步进电机直接将数字脉冲信号转化成为角位移或直线位移脉冲信号,作为控制电机和驱动电机使用时具有转子惯量低、定位精确度高、控制简单等特点,因此步进电机在精密仪器、医疗器械、半导体加工等诸多领域具有广泛应用价值[1]。傳统的步进电机控制主要是基于处理器的,如单片机[2]、可编程逻辑控制器(PLC)[3]、DSP[4]等设备,这些设备往往存在电路灵活性差、不易调整、编程复杂、稳定性差等不足。本文研究使用PCI-1711U数据采集控制卡实现对三轴滑台步进电机的开环控制,利用其独立的处理器、带缓冲隔离、总线主控以及即插即用的特点,克服传统步进电机控制方案的不足[6]。同时,利用图形化编程语言的虚拟仪器LabVIEW技术,设计开发控制系统的上位机及控制算法,提高系统的编程灵活性和系统的稳定性。
1三轴滑台运动控制系统
三轴滑台运动控制系统的整体框架如图1所示。此系统以步进电机作为驱动设备,上位机控制器根据预期指令控制目标,产生决策命令并生成控制矢量,控制PCI-1711U控制卡输出脉冲信号送给电机驱动器,控制步进电机按照期望动作。系统的控制可以是开环控制或闭环控制,也可以是速度或位置控制。
2系统硬件设计
2.1步进电机及驱动器
三轴滑台经步进电机驱动,丝杆机械传动,控制其在三维空间中运动,如图2所示。步进电机为PK-569-A高转矩低震动五相步进电机,基本步距角为0.72°,可使用驱动器进行2细分,半步进驱动方式步距角为0.36°。XYZ轴的丝杆导程分别为20mm、20mm和2mm,步距角和丝杆导程可为实现开环定位提供计算依据[3]。
步进电机驱动器为SD528,有16种驱动电流,每相最高达1.4A。可接收单脉冲(1P)或双脉冲(2P)输入方式,和采用全步进(每步0.72°)或半步进(每步0.36°)驱动方式,驱动器接线如图3所示。驱动器脉冲输入方式为下降沿触发,即无脉冲信号输入时,维持高电平。双脉冲输入控制时,CW端的脉冲控制步进电机顺时针旋转,CCW端的脉冲控制步进电机逆时针旋转。单脉冲输入控制时,CW端脉冲控制步进电机转动的角度和速度,CCW端的高/低电平则控制步进电机的转动方向。本系统采用单脉冲输入方式,CW和CCW采用共阴极接线方式。
2.2PCI-1711U运动控制卡
PCI-1711U是研华公司生产的一款多功能PCI总线数据采集控制卡,其模块化仪器通讯总线具有最常用的测量和控制功能,如16路单端或8路差分12位模拟量采集输入(AI)、16路数字量输入(DI)、16路数字量输出(DO)、2路12位模拟量电压输出及可编程计数器/定时器功能。在本运动控制系统中,选取数字量输出端口DO4、DO7、DO3分别作为X轴、Y轴、Z轴的步进电机驱动器的CCW端口信号输入端口,通过控制三端口的高低电平输出,实现对XYZ三轴步进电机运动的控制。选取数字量输出端口DO2、DO5、DO1分别作为步进电机驱动器的CW端口脉冲信号输入端口,通过控制脉冲频率的高低,实现对步进电机转速的控制。
PCI-1711U控制卡进行硬件电路连接时,需要通过两端针型接口的68芯SCSI-II电缆,连接至接线端子板,如图4所示。本系统采用PCL-10168型双绞线电缆,模拟信号和数字信号分开屏蔽,从而最大程度降低信号干扰,并解决EMI/EMC问题。DIN导轨安装的接线端子板完成各种输入输出信号线的连接,其68个接线端子与控制卡一一对应。在后续工作中,还可以利用PCI-1711U采集控制卡的AI和DI端口,采集位移传感器及限位开关的信号,进一步完善控制系统。
3系统软件设计
在本系统中,使用虚拟仪器LabVIEW技术设计开发三轴滑台运动控制系统的软件系统[5],管理PCI-1711U采集控制卡的操作,提供用户和控制系统的接口。
利用虚拟仪器的多线程同步技术,分别为XYZ轴上的步进电机分配控制线程,根据预期的控制目标,生成各自由度上的控制矢量。控制矢量经PCI-1711U控制卡的数字量输出端送入驱动器,控制步进电机的运动状态,实现:①通过控制步进电机来独立控制各自由度上点到点的运动;②各自由度上步进电机的加速、减速独立控制;③根据各自由度上设定的定位距离和转向距离,生成控制矢量(脉冲频率和个数),具有位置跟踪功能。设计的人机交互面板如图4所示,对应Z轴控制线程的程序如图5所示。
在程序实现上,利用移位寄存器和“布尔至脉冲转换.vi”生成PWM波并对脉冲计数,如图5的①和②处。通过调节定时器的定时周期来控制PWM波的频率,如图5中③处。进而,由PWM波的频率和个数变化来控制步进电机的转速和线位移[8]。程序中SelectDecivePop.vi、DeciveOpen.vi、DIO WriteBit.vi为PCI-1711U运动控制卡的LabVIEW函数,分别完成选择硬件设备、打开硬件设备和写硬件设备数字量并输出的功能。
对于滑台各自由度上的位置跟踪功能,可根据步进电机的步距角及丝杆导程计算生成控制矢量来实现。本滑台X、Y轴步进电机配套的丝杆导程为20mm,Z轴丝杆导程为2mm,步进电机的驱动器为全步进方式(步距角为0.72°),则X、Y轴的脉冲当量为D=20*0.72/360=0.04,Z轴脉冲当量为0.004。因此,若X轴移动40mm,则需要1 000步进脉冲,同理,可计算YZ轴的控制矢量数据。
经实验测试,所设计的三轴滑台控制系统运行稳定,可靠地实现了三维空间中,点到点的定位,且界面友好。另一方面需要说明的是,考虑到在本系统中PWM波的频率控制是利用Windows系统的定时器实现的,因此频率上限只能达到1kHz,对于频率要求更高的场合,可结合硬件资源,利用PCI-1711板卡的可编程定时器及虚拟仪器的定时循环结构来实现,此处不再赘述。
4结语
本文介绍了基于虚拟仪器LabVIEW和PCI-1711U运动控制卡的三轴滑台控制系统的设计。该系统摆脱了传统控制系统完全依赖处理器的缺點,编程简单、操作简便、系统操作界面直观友好。实验测试结果表明该系统达到了较好的控制效果,可靠地实现了三维空间中点到点的定位。此系统可应用于3D打印、智能数控机床等领域,为三维空间中运动的控制提供了一种设计方法。同时LabVIEW提供的强大函数库,可大大减少非计算机专业人员的开发时间,提高工作效率,相比于传统控制方法更具有优势。
参考文献:
[1]孙秀桂,赵兵.基于labVIEW的步进电机控制器的设计[J].大理学院学报,2008,7(12):68-71.
[2]张占立,康春花.基于单片机的步进电机控制系统[J].电机与控制应用,2011,38(3):28-31.
[3]王彦军,李增生.基于PLC的步进电机控制[J].科学技术与工程,2011,11(5):1707-1709.
[4]张宝发,赵辉,岳有军.基于DSP的步进电机控制系统设计[J].仪表技术与传感器,2010(8):63-65.
[5]陈方泉,李建周,马思文.基于LabVIEW的步进电机驱动设计及其应用[J].上海大学学报,2006,12(1):89-92.
[6]李进杰,高伟.基于LabVIEW的步进电机控制系统设计[J].机械与电子,2010(15):85-86.
[7]杨林,方宇栋.LabVIEW控制步进电机[J].微计算机信息,2004,20(2):7-8.
[8]曹卫彬.虚拟仪器典型测控系统编程实践[M].北京:电子工业出版社,2012:117-132.
[9]毛计庆.labVIEW——快速构建步进电机控制系统的利器[J].电机与控制应用,2009,36(1):30-32.
(责任编辑:刘亭亭)
