模糊PID复合控制的移相全桥ZVS PWM变换器设计研究
叶玉曜+张振国+李树娟+邓得洋

摘要:
随着数字开关电源的不断发展,为实现一种高效稳定且适用于DSP控制的高频化高效率新型数字开关电源DC/DC变换器,通过采用移相全桥ZVS PWM变换器结构,使用模糊自整定PID复合控制调节电压以消除系统控制盲区及稳态误差,利用DSP自身的硬件资源实现移相控制脉冲,依据计算结果采用合理器件参数完成系统硬件构建,并最终利用MATLAB进行了仿真。仿真结果表明,该变换器不论在恒定负载还是负载突变时,均能在0.05s内将输出电压值稳定在48V,反应迅速,输出波形稳定,验证了设计的合理可行。
关键词:
DC/DC变换器;移相全桥;模糊自整定;PID控制;DSP
DOIDOI:10.11907/rjdk.173091
中图分类号:TP319
文献标识码:A文章编号文章编号:1672-7800(2018)001-0175-04
Abstract:With the continuous development of the digital switching power supply, for designing a highly efficient and stable DC/DC converter which is adapted in DSP controlled high frequency and efficiency digital switching power supply, this paper used phase shifted full bridge ZVS PWM converter structure, fuzzy self-tuning PID compound strategy to control voltage and eliminate the blind area and the steady-state error,DSP own hardware resources to realize phase shift control pulse and calculation results to construct hardware system. The simulation was carried out by using MATLAB. The simulation results showed that the output voltage of the converter could be stabilized in 48V within 0.05s, and the output waveform was stable, no matter with the constant load or load mutation, which verified the rationality and feasibility of the design.
Key Words:DC/DC converter; phase shifted full bridge; fuzzy self-tuning; PID control;DSP
0引言
伴隨着现代社会的飞速发展,电子设备已经进入社会生产生活的各行各业,开关电源已成为许多电子设备的重要组成部分。相较于模拟控制,数字开关电源能实现更高级的控制算法和控制策略,可以从根源上改善直流电源的性能,且智能化程度更高,抗干扰能力强[1]。本文以实现一种TMS320F28335控制的高频化和高效率的新型数字开关电源为背景,对基于模糊自整定PID复合控制算法的移相全桥ZVS PWM变换器进行了研究,对基于TMS320F28335的数字移相控制算法的实现进行了详细阐述,并根据设计参数,利用Matlab进行了仿真,验证了研究结果的正确可行,且充分满足设计要求。
1移相全桥变换器电路结构
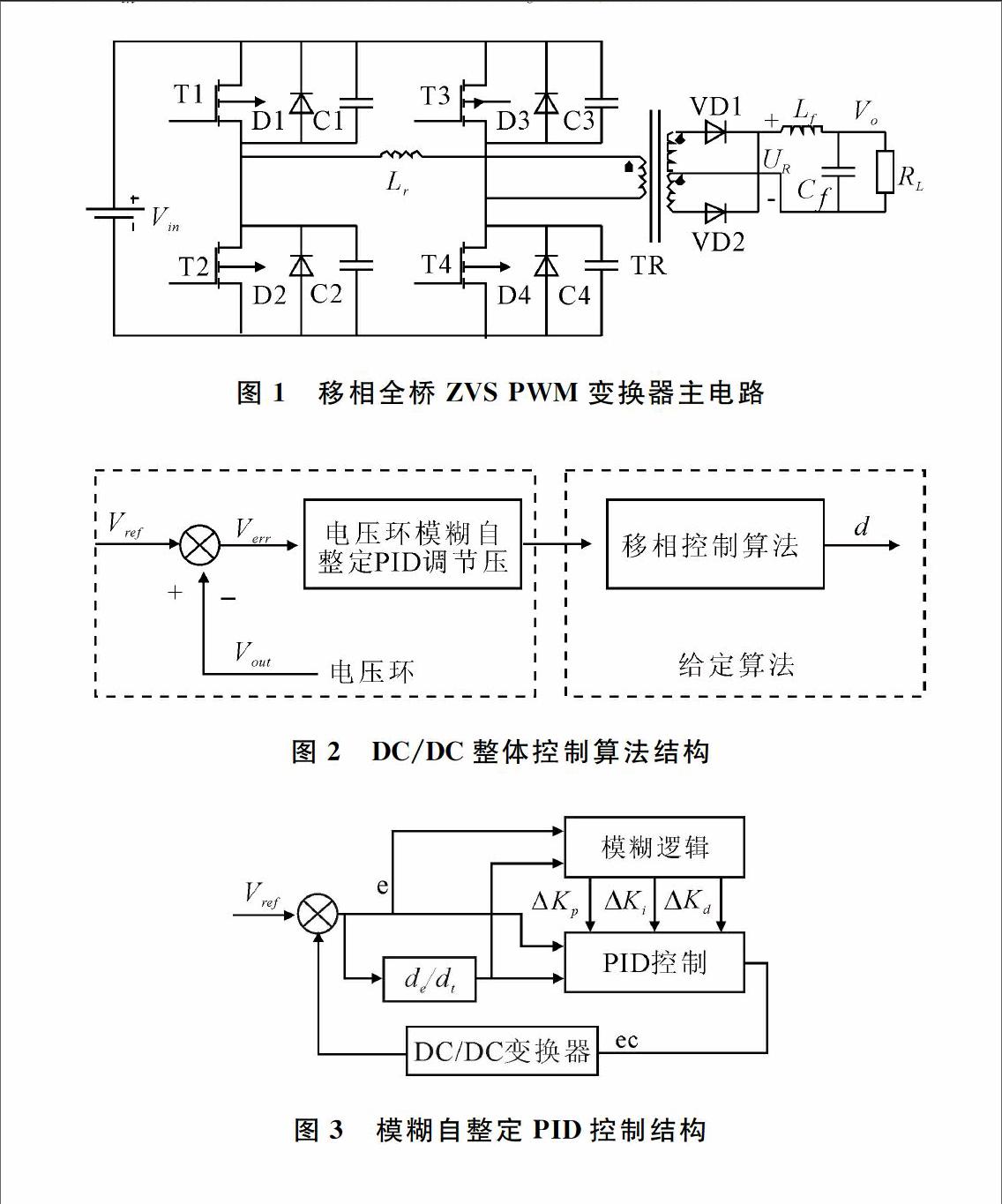
本文所研究的移相全桥型ZVS PWM软开关实际电路如图1所示。图1中的T1~T4是总功率开关管,D1~D4为总功率开关管的反响并联二极管,C1~C4为总功率管接电容或者是外接的电容,Lr是电路谐振电感(包含变压器的漏感),TR是输出高频变压器,VD1和VD2为输出整流二极管,Lf、Cf为输出滤波电感和电容,RL为负载,Vin为输入直流电源电压,Vo为输出电压。
2移相全桥电路的软件设计
2.1控制算法结构
变换器由单个电压环实现控制,其整体控制策略见图2。电压误差是由输出电压的采样值与输出电压的基准值相比较得到。误差值由电压环模糊自整定PID调节后再经过移相控制算法,以最终实现对功率开关管的控制[2]。
2.2模糊自整定PID复合控制器的设计
模糊自整定PID控制器的结构如图3所示。其中模糊控制器采用两输入三输出的结构[3],将检测电压与给定电压的误差e=V_ref-V_out及其误差变化率de/dt作为系统的输入信号,模糊控制的输出为修正变量参数ΔKp、ΔKi、ΔKd,实现对传统PID控制变量的实时自动校正。整体系统的输出即为电压环的检测值。
2.2.1确定输入、输出变量的模糊语言
模糊自适应模糊控制器的输入量为误差e、误差变化率ec;输出量为ΔKp、ΔKi和ΔKd。论域模糊集均设为{NB,NM,NS,ZE,PS,PM,PB};e、ec、ΔKp、ΔKi、ΔKd的论域均为{-3,-2,-1,0,1,2,3}。
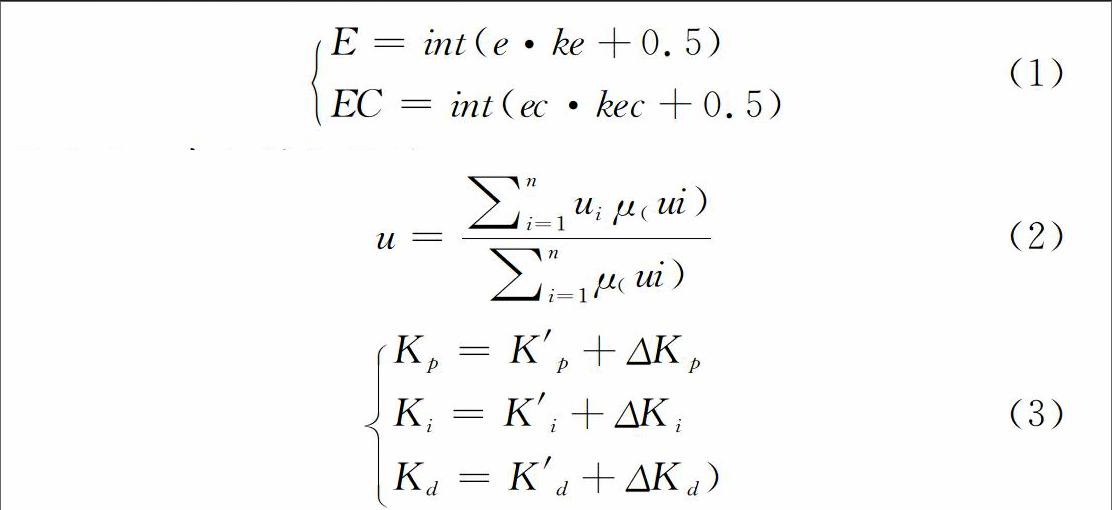
使输出电压稳定在48V是本文调压的目标,所以电压误差和电压误差变化的基本论域都取为[-48,48],参考电压的基本论域取[-10,10]。输入(E、EC)的模糊论域均取为[-3,3]。所以比例因子分别为:ke=3/48,kec=3/48。模糊化公式为:
摘要:
随着数字开关电源的不断发展,为实现一种高效稳定且适用于DSP控制的高频化高效率新型数字开关电源DC/DC变换器,通过采用移相全桥ZVS PWM变换器结构,使用模糊自整定PID复合控制调节电压以消除系统控制盲区及稳态误差,利用DSP自身的硬件资源实现移相控制脉冲,依据计算结果采用合理器件参数完成系统硬件构建,并最终利用MATLAB进行了仿真。仿真结果表明,该变换器不论在恒定负载还是负载突变时,均能在0.05s内将输出电压值稳定在48V,反应迅速,输出波形稳定,验证了设计的合理可行。
关键词:
DC/DC变换器;移相全桥;模糊自整定;PID控制;DSP
DOIDOI:10.11907/rjdk.173091
中图分类号:TP319
文献标识码:A文章编号文章编号:1672-7800(2018)001-0175-04
Abstract:With the continuous development of the digital switching power supply, for designing a highly efficient and stable DC/DC converter which is adapted in DSP controlled high frequency and efficiency digital switching power supply, this paper used phase shifted full bridge ZVS PWM converter structure, fuzzy self-tuning PID compound strategy to control voltage and eliminate the blind area and the steady-state error,DSP own hardware resources to realize phase shift control pulse and calculation results to construct hardware system. The simulation was carried out by using MATLAB. The simulation results showed that the output voltage of the converter could be stabilized in 48V within 0.05s, and the output waveform was stable, no matter with the constant load or load mutation, which verified the rationality and feasibility of the design.
Key Words:DC/DC converter; phase shifted full bridge; fuzzy self-tuning; PID control;DSP
0引言
伴隨着现代社会的飞速发展,电子设备已经进入社会生产生活的各行各业,开关电源已成为许多电子设备的重要组成部分。相较于模拟控制,数字开关电源能实现更高级的控制算法和控制策略,可以从根源上改善直流电源的性能,且智能化程度更高,抗干扰能力强[1]。本文以实现一种TMS320F28335控制的高频化和高效率的新型数字开关电源为背景,对基于模糊自整定PID复合控制算法的移相全桥ZVS PWM变换器进行了研究,对基于TMS320F28335的数字移相控制算法的实现进行了详细阐述,并根据设计参数,利用Matlab进行了仿真,验证了研究结果的正确可行,且充分满足设计要求。
1移相全桥变换器电路结构
本文所研究的移相全桥型ZVS PWM软开关实际电路如图1所示。图1中的T1~T4是总功率开关管,D1~D4为总功率开关管的反响并联二极管,C1~C4为总功率管接电容或者是外接的电容,Lr是电路谐振电感(包含变压器的漏感),TR是输出高频变压器,VD1和VD2为输出整流二极管,Lf、Cf为输出滤波电感和电容,RL为负载,Vin为输入直流电源电压,Vo为输出电压。
2移相全桥电路的软件设计
2.1控制算法结构
变换器由单个电压环实现控制,其整体控制策略见图2。电压误差是由输出电压的采样值与输出电压的基准值相比较得到。误差值由电压环模糊自整定PID调节后再经过移相控制算法,以最终实现对功率开关管的控制[2]。
2.2模糊自整定PID复合控制器的设计
模糊自整定PID控制器的结构如图3所示。其中模糊控制器采用两输入三输出的结构[3],将检测电压与给定电压的误差e=V_ref-V_out及其误差变化率de/dt作为系统的输入信号,模糊控制的输出为修正变量参数ΔKp、ΔKi、ΔKd,实现对传统PID控制变量的实时自动校正。整体系统的输出即为电压环的检测值。
2.2.1确定输入、输出变量的模糊语言
模糊自适应模糊控制器的输入量为误差e、误差变化率ec;输出量为ΔKp、ΔKi和ΔKd。论域模糊集均设为{NB,NM,NS,ZE,PS,PM,PB};e、ec、ΔKp、ΔKi、ΔKd的论域均为{-3,-2,-1,0,1,2,3}。
使输出电压稳定在48V是本文调压的目标,所以电压误差和电压误差变化的基本论域都取为[-48,48],参考电压的基本论域取[-10,10]。输入(E、EC)的模糊论域均取为[-3,3]。所以比例因子分别为:ke=3/48,kec=3/48。模糊化公式为:
