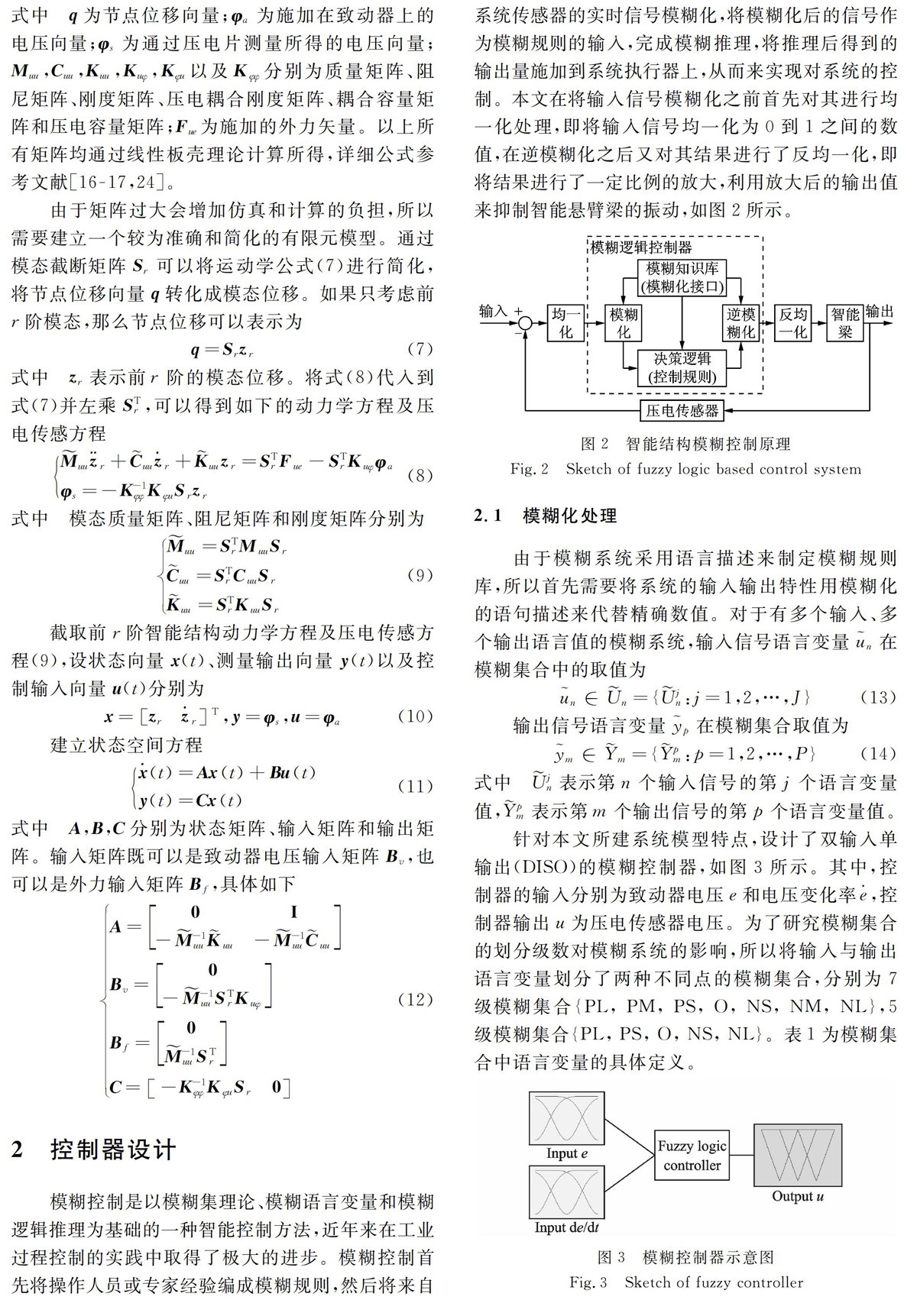
压电智能悬臂梁模糊振动抑制研究
张顺琦 于喜红 王战玺 秦现生


摘要:为了实现对压电智能结构此类复杂机电耦合系统的主动振动控制仿真,建立了智能结构的机电耦合动力学有限元模型,并推导和简化了模型的动力学方程与压电传感方程,建立了系统的状态空间模型,设计了模糊逻辑控制器。基于模糊逻辑理论,划分了两种不同级别的模糊集合,确定了模糊集合语言变量值,设计了4种不同的模糊控制规则,并采用重心法作为逆模糊化方法。分别模拟了智能结构的自由振动、在脉冲干扰下的振动以及在谐波干扰下的振动,比较了模糊控制器、PID控制器、LQR控制器在3种不同类型的振动方式下对智能结构的振动控制效果。 关键词:振动控制;智能结构;模糊控制;压电材料 中图分类号:TB535;TP273.4
文献标志码:A
文章编号:1004-4523(2017)01-0110-08 DOI:10.16385/j.cnki.issn.1004-4523.2017.01.015
引言
对压电智能结构机电耦合建模和振动控制进行仿真可有效避免高昂的实验费用,并可给设计提供参考,缩短设计周期。薄壁结构与压电材料集成的智能结构建模可采用三维有限元方法,或基于各种板壳假设下的二维有限元方法,如基于经典板壳假设[1]、一阶剪切变形假设(又称Reissner-Mindlin假设)_2]、三阶剪切变形假设[3]、Zigzag假设_4等。三维有限元方法没有考虑任何几何上的假设,计算相对精度高,但是模型的维数大,导致计算消耗大。二维有限元通过板壳假设可大大减少计算消耗,可仍然保证较高的精度。
在主动振动控制仿真方面,大部分已发表的文献采用相对简单易实现的速度反馈[2-3]、Lya—punov[5]和Bang-Bangc6]等控制方法。为能在一定电压加载下达到最好控制效果,Narayanan&Bal—amurugan[6]、Li等[7]、缑新科等豳提出将LQR全状态反馈最优控制用于压电智能结构的主动振动控制。然后LQR最优控制需要全状态测量,不容易实现,为此Vasques&Rodrigues[9]提出采用LQG控制方法,利用观测器实现对状态量的反馈,并采用LQR优化方法计算控制增益。此外,Li等口。。将鲁棒控制应用到智能结构的主动振动控制中;Manju—nath&Bandyopadhyay[11]提出了离散滑模控制方法;Valliappan&Qi[1。设计了预测控制;Lin&Nien[13]采用了独立模态控制以及Rhattacharya等_1胡提出了基于LQR优化的独立模态控制;钱锋[1引、Zhang等_1。采用PID方法。以上的控制方法中没有反馈未知干扰,因为干扰往往不可测。然而振动主要由外部干扰所引起的,为了能预测未知的干扰,并在控制回路中加以考虑,zhang等口提出了抗扰控制方法实现智能结构的主动振动抑制。
以上所提常规控制方法都需要一个较为准确的智能结构数学模型。在现实应用中很多结构都难以获取数学模型,因此常规控制方法的应用受到一些限制。为摆脱对数学模型的依赖,模糊控制、神经网络控制等智能控制方法可成功应用。Lee[18],Va—loor等口叼设计了基于人工神经网络的控制器并进行了仿真,而Kumar等瞳叫、Qiu等瞳妇对基于神经网络的压电智能结构主动振动控制进行了实验性研究。在智能结构模糊控制方面,张京军等口引、shira—zi等口。采用模糊控制分别对压电梁结构和功能梯度材料结构进行振动控制。
由文献可知,目前大部分智能结构的振动抑制研究都集中在传统控制方法上,采用智能控制算法的研究较少,特别是模糊控制。模糊控制是一种基于专家经验和知识且不依赖于系统数学模型的非线性控制,易于实现。文献简单地应用了模糊控制方法,并未研究模糊控制与其他控制器相比的优越性及模糊变量对智能结构振动控制效果的影响。1压电悬壁梁有限元动力学模型
为方便模糊控制设计与仿真,需要建立智能结构的动力学有限元模型代替实际系统。首先需要引人两个坐标系,即由xi(i=1,2,3)表示的笛卡尔坐标系,以及由θi(i=1,2,3)表示的曲线坐标系。其中,笛卡尔坐标系为世界坐标,曲线坐标系为结构坐标系,后者可以是平面、圆柱、球坐标或者其他坐标系,如图1所示。
图1中左半部分和右半部分分别为智能结构变形前与变形后的横截面。为了区分变形前后的变量,变形后的变量统一在变量上方加一短线。u为壳体空间中任一点Pv的位移向量,Uo为中性面上任一点PΩ力的位移向量,n与a3分别为变形前和变形后沿θ3方向的基向量。
根据一阶剪切变形假设(FOSD),薄壁结构空间内任一点的位移可以假定为
3.系统仿真
本文采用压电智能梁作为仿真对像,如图4所示,主体梁结构上下表面分别粘贴压电片作传感与致动,详细介绍参见文献。智能梁振动控制仿真实现如图5所示。整个智能梁用8节点的有限元单元分别沿着θ1和θ2轴划分网格为5×1。悬臂梁主结构与压电片的材料参数如表7所示。阻尼矩阵通过Rayleigh阻尼系数计算方法得到,模态阻尼比为0.8%。针对系统结构特点,将贴合在梁下表面的压电片作为致动器,贴合在上表面的压电片作为传感器。假设外力F施加在悬臂梁末端,其方向沿着θ3负方向,以此来对悬臂梁产生一个激励。考虑到前2阶模态对振动贡献最大,为了简化有限元模型,所以将仿真系统简化为前2阶模态,即只考虑前
2.阶特征频率。
3.1自由振动
第一组仿真是智能结构在自由振动下的控制,在F=0.2N的力作用下产生一定的初始静态位移,然后释放作用力产生振动。采用第二节设计的模糊控制器,利用不同的控制规则对智能结构进行振动抑制,其结果如图6所示,图6(a)为智能悬臂梁在模糊控制下和没有控制下,压电传感器的输出电压,图6(b)为模糊控制计算出的致动电压。从结果中可以看出7级模糊规则比5级模糊规则好。这是由于7级比5级精细,控制更加连续。此外,7级模糊控制规则曲面Casel比Case2光滑,因此Casel的结果要优于Case2。同样,5级模糊控制规则中Case3的控制规则曲面比Case4稍光滑,所以Case3的控制效果比Case4好。
在致动器上加载的电压最大值一致的情况下,用PID控制、LQR控制及模糊控制Casel对自由振动进行抑制,其结果如图7所示。从结果可以看出PID和LQR控制效果比较接近;在0.3s之前,PID与LQR控制的控制效果略好于模糊控制,在0.3s以后模糊控制大幅的减弱了系统的振动,大约在0.6s时系统在模糊控制器的控制下基本停止了振动,相比PID和LQR需要約1.2s时间。
3.2脉冲干扰
仿真实验分别在0.2与2.2s处对悬臂梁末端施加一个持续时间为0.001s的单位阶跃外力,以此来模拟脉冲干扰使悬臂梁产生振动。图8为系统模型分别在模糊控制与LQR控制下,传感器输出电压与作动器输入电压的动态变化情况。同样可以看出在初始阶段,模糊控制的控制效果不如LQR控制,但是模糊控制大约在0.9s时使系统停止了振动,而LQR控制大约在1.8s左右才使系统停止振动。
3.3谐波干扰
仿真实验采用振幅为0.12N、角频率为兀/2rad/s的余弦函数来产生一个谐波干扰信号。图9为系统模型分别在模糊控制与LQR控制下,传感器输出电压与作动器输入电压的动态变化情况。可以看出仿真结果与施加脉冲干扰时类似,模糊控制能在较短的时间内达到比最优控制更好的振动抑制效果。
4.结论
模糊集合等级的划分以及模糊规则的建立对控制效果至关重要,所以本文将输入与输出语言变量划分成了7级模糊集合和5级模糊集合,并分别建立了两种不同的模糊规则。通过模拟智能结构的自由振动,发现在相同隶属函数的条件下,模糊集合划分的越精细、模糊规则曲面越光滑,模糊控制器的控制效果越好。
通过模拟智能结构的自由振动、在脉冲干扰下的振动以及在谐波干扰下的振动,比较了模糊控制器与PID控制器、LQR控制器分别对智能结构振动抑制的效果,仿真结果发现,模糊控制器相比其他两种控制器能够在较短时间内使结构停止振动。
