位移一加速度振动台迭代学习控制方法试验研究
许国山 徐景锋 吴斌 冯立敏

摘要:针对传统位移控制液压伺服振动台台面加速度波形再现不精确的问题,提出了基于位移一加速度振动台迭代学习控制方法,并通过数值模拟和储罐振动台模型实验研究迭代学习控制方法的性能。研究结果表明:基于位移一加速度迭代学习控制方法相比基于位移一位移迭代学习控制方法对于加速度的再现精度更高,修正迭代方法相比直接迭代方法的收敛速度稍快。
關键词:振动台;振动控制;位移一加速度迭代;位移一位移迭代;修正迭代;直接迭代
中图分类号:P315.9;TU352
文献标志码:A
文章编号:1004-4523(2017)01-0100-10
DOI:10.16385/j.cnki.issn.1004-4523.2017.01.014
引言
在土木工程领域,地震模拟振动台能够在一定程度上模拟真实地震动环境,可以得到接近实际情况的结构响应,被认为是最直接有效的结构抗震实验手段。经过五十余年的发展,逐渐形成了较成熟的加载控制方法。目前,自适应控制、模糊控制等先进算法已在电液伺服振动台控制中得到研究。马立英和周提出通过在试件上实测加速度反馈对目标期望加速度信号进行学习跟踪,二次频域积分得到的位移信号谱用于修正振动台作动器的驱动信号。本文研究对象为哈尔滨工业大学土木工程学院结构与抗震实验中心3m×4m单向水平振动台,该振动台属国内较早建造的一批,引进德国Schenck公司生产的作动器和美国MTS公司生产的控制器,由哈工大联合国内多家厂商生产振动台面及配套设备,采用单纯的位移控制方式。目前,整个系统存在多个层面的非线性问题,致使台面加速度波形再现精度很不理想,迫切需要对该振动台的控制方法改进。由于很难准确确定振动台各组成部分的控制参数,且调整参数对于控制精度改进效果不明显,另外,对振动台自身控制系统进行调整也是一项极其困难的工作,因此本文采用一种基于位移一加速度迭代控制的方法。该方法忽略系统内部具体构造,将其视为黑箱,仅根据输入输出信号特性求取系统传递函数,通过不断修正输入激励命令,最终得到理想的输出响应。
本文通过数值模拟和试验研究基于位移一加速度直接迭代、修正迭代控制方法的振动台台面加速度再现精度。
1.振动台迭代学习控制原理
自从1984年Arimoto等人将迭代学习的概念应用到机器人控制领域以来,学术界迅速展开了对该方法的深入研究。其算法简单,无需辨别被控对象的参数,通过往复运动的经验来完成学习,使输出效果与既定期望之问的误差逐渐减小,最终达到完全跟踪的目的。对于振动台这种内部构造复杂、非线性较强的系统十分适用。
1.1直接迭代和修正迭代方法
迭代学习控制根据运算算法差异可分为直接迭代和修正迭代,其原理如图1和2所示。
图1为第k次直接迭代过程,根据命令输入uk(t)和响应输出yk(t)的傅氏谱辨识出系统的传递函数hk(f)。利用该传递函数,直接求取下次迭代的输入命令。
图2为第k次修正迭代过程,根据命令输入Uk(t)和响应输出yk(t)的傅氏谱辨识出系统的传递函数hk(f),求取期望与响应差值△yk(t),并得时域内输入差值△uk(t),进而得到新的输入命令uk+1(t)。图2中K为影响因子,其取值介于0和1之问。
迭代不能无限制运行下去,当输出信号已经令人满意时,就可以停止迭代过程。因此,需要一个定量的指标来衡量输出信号与期望信号之问的误差。本文采用刘永昌等提出的相关系数的概念用来判别波形再现精度。相关系数Kxy≤1,当它趋近于1时,相对误差趋近于0。经验表明,当Kxy≥0.90时,输出信号与期望信号便吻合良好,能够满足振动台实验精度要求。
1.2振动台仿真模型
本文以哈尔滨工业大学结构与抗震实验中心单向水平振动台为原型应用Matlab建立仿真模型。仿真实验中以El Centro波为输入信号,采集台面位移作为输出信号。邱法维曾在1989年针对此振动台作了系统研究,得到各部分相关参数,如图3所示。该振动台由于台面支撑系统和振动台基础产生的干扰力很小,故不考虑其动力特性。振动台原型单独采用位移控制,无法精确实现期望台面加速度。
2.基于位移一位移迭代学习控制方法
2.1基本原理
图1和2给出了根据运算算法不同而分类的直接迭代和修正迭代方法原理。对于采用单一位移反馈控制的振动台而言,通常运用双闭环控制概念,在保持内环位移反馈控制不变的基础上,通过求取输出位移与期望位移之间传递函数进行外环迭代控制,搭建如图4所示基于位移一位移迭代学习控制方法。图4中:①为期望加速度,②为期望位移,③为外环位移命令输入,④为内环位移命令输入,⑤为内环位移响应输出,⑥为外环位移响应输出。
内闭环如图中④和⑤部分组成,当控制器发出一个期望位移命令信号,并由作动器实现时,因为超调、震荡、液压油泄露和伺服阀的非线性因素等原因引起的响应误差能够反馈给作动器并得到补偿。由于难免会产生一定的时滞,整体位移波形吻合并不是很好。
图4中,外闭环由外置位移传感器、迭代学习控制器、积分环节和MTS内环构成,其控制原理如下:(1)运用适当的积分方法将初始期望加速度命令①经两次积分为第一次外环位移命令②输入给MTS控制器,经内闭环④和⑤激励振动台振动;(2)将布置在台面上的位移传感器采集到的位移响应信号⑥传输到MTS主控台上存储起来,并与期望位移做比较求得传递函数;(3)在迭代学习控制器中,由位移命令、实测位移响应、期望位移经运算求得新的外环位移命令,如此循环。
2.2基于位移一位移迭代学习控制仿真
图5为不采用迭代控制情况下在El Centro(NS,1940)地震记录激励下的控制效果图。由图5可见,无迭代时实测输出位移响应与期望位移之间存在较大差异。图6和7分别为直接迭代和修正迭代三次所达到的效果。由图可见,两种方法对位移控制效果改善都比较明显。迭代过程中相关系数列于表1。从表1可见,直接迭代和修正迭代的相关系数分别从迭代前的0.7642提高到0.9956和0.9974。相比之下,修正迭代方法收敛稍快,最终响应与期望曲线更加接近。
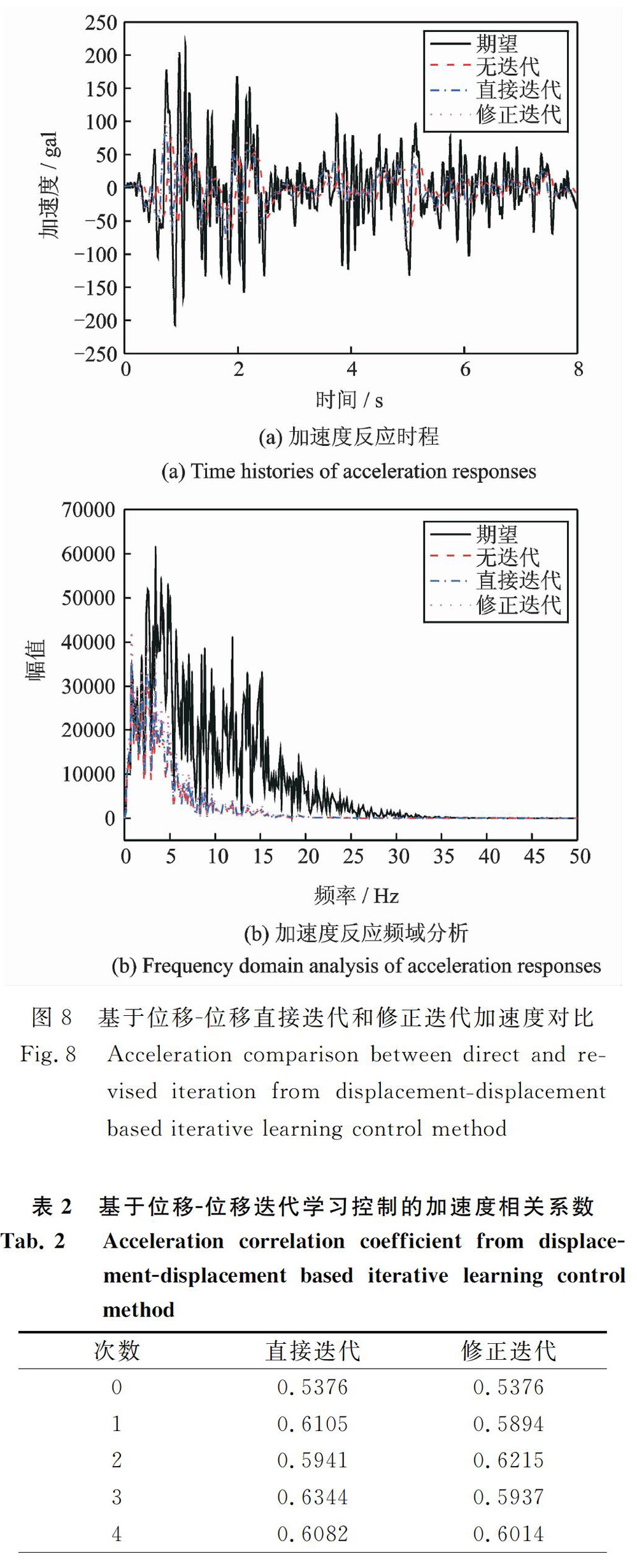
取基于位移一位移迭代前后El Centro波加速度对比如图8所示。由图8可以看出,无迭代、直接迭代、修正迭代三种情况下的加速度反应与期望加速度相差较大。每次迭代的加速度相关系数见表2。由表中数据分析可知,在进行EI Centro波位移一位移迭代学习控制的过程中,加速度并未随着位移再现精度的改善而改善,相关系数数值起伏不定。但变化幅度不是很大,加速度相关系数在0.5~0.6范围内变化,加速度控制精度很差。
3.基于位移一加速度迭代學习控制方法
3.1基本原理
基于位移一位移迭代控制方法用到的信号包括期望位移、外环位移命令输入和外环位移响应输出。这种方法能使振动台的位移响应得到很好的改善,然而加速度响应与期望加速度之间仍存在较大差异。而振动台实验更关心加速度控制效果,因此本文接下来研究基于位移一加速度迭代控制方法,即用期望加速度、外环位移命令输入、外环加速度响应输出做迭代控制器的参量,如图9所示。该方法需建立输入位移到加速度输出之问的传递函数,运用期望加速度直接求取新的位移输入命令,以改善加速度控制效果。图9中①为期望加速度,②为期望位移,③为外环位移命令输入,④为内环位移命令输入,⑤为内环位移响应输出,⑦为外环加速度响应输出。
图9中,内闭环如图中④和⑤部分组成,外闭环由外置加速度传感器、迭代学习控制器、积分环节和MTS内环构成。其控制原理如下:(1)运用适当的积分方法将初始期望加速度命令①经两次积分为第一次外环位移命令②输入给MTS控制器,经内闭环④、⑤激励振动台振动;(2)将布置在台面上的加速度传感器采集到的加速度响应信号⑦传输到MTS主控台上存储起来,并与位移命令做比较求得传递函数;(3)在迭代学习控制器中,由位移命令、实测加速度响应、期望加速度经运算求得新的外环位移命令,如此循环。
3.2基于位移加速度迭代学习控制仿真
基于位移一加速度迭代学习控制原理与基于位移一位移迭代学习控制方法的原理相似,不同点是用实测加速度输出和位移命令输入做传递函数,并通过期望加速度求取新的振动台位移输入命令。同样以El Centro波为例,验证基于位移一加速度迭代学习控制效果。
图10为基于位移一加速度迭代后台面所得位移反应对比图。由此图可以看出,无迭代时的位移反应与积分后期望位移较接近,而直接迭代和修正迭代后的位移反应与期望位移相差较大。每次迭代所得位移相关系数统计见表3。由此表也可以看出,位移相关系数有下降趋势。
图11~13为基于位移一加速度迭代后台面所测加速度反应对比图。由这些图可以看出:无迭代时的加速度反应与期望加速度相差较大,而直接迭代和修正迭代后的加速度反应与期望加速度吻合较好。迭代前后加速度相关系见表4。由此表可以看出:迭代前加速度吻合度很差,相关系数K。一0.5376;经三次迭代运算后,直接迭代相关系数提高到Kxy=0.9426,修正迭代相关系数提高到Kxy=0.9638。经过三次迭代的结果能够很好地满足实验精度要求。
通过数值模拟分析可以得到如下结论:位移一位移迭代方法可以提高位移再现精度,但对加速度控制效果改善不明显;位移一加速度迭代方法会损失位移控制精度,但对加速度的控制精度有明显改善;修正迭代方法的收敛速度稍快于直接迭代方法。对于振动台试验而言,更期望精确再现加速度,所以基于位移一加速度迭代方法更合适。值得指出的是,振动台仿真模型中忽略了各种非线性因素的影响,这与真实的振动台有很大差别,还需通过真实实验进一步验证迭代算法的可靠性。本文接下来着重通过试验验证基于位移一加速度迭代控制方法的精度。
4.迭代学习控制实验验证
4.1试验试件
本文实验所用试件为储油罐模型,设计缩尺比例为1/6,罐高1.6m,罐体半径1m。通体采用Q235钢材,其物理性能同原型相同。储罐试验试件照片见图14,模型设计参数如表5所示。关于试验模型具体介绍,可参见文献。
4.2空置振动台迭代学习控制验证
储罐模型实验前,首先应用El Centro(NS,1940)地震记录进行空置振动台迭代学习控制试验。图15和16分别为基于位移一位移直接迭代前后期望输入与输出的对比曲线。由图15和16可见:迭代前位移响应与期望位移在幅值上存在微小误差;相关系数在迭代前为Kxy=0.9596,迭代后提高到Kxy=0.9985。输出曲线与期望曲线基本重合,达到了预期效果。
图17和18分别为位移一加速度迭代前后期望加速度与加速度响应对比图。从图中可见:迭代前加速度实现效果较差,相关系数只有Kxy=0.4426;迭代后,虽然在小幅值附近还存在微小差异,但波形基本吻合,相关系数达到Kxy=0.9451,已完全能够满足实验精度要求。
4.3 50cm水位储罐振动台迭代学习控制验证
选取El Centro波进行50cm水位基于位移一加速度迭代学习控制试验。迭代前加速度响应与期望值对比如图19所示。经过直接迭代和修正迭代后的加速度反应见图20和21所示。
由图19可见,迭代前输出加速度与期望加速度之问存在较大的误差,此时相关系数Kxy=0.3685。这说明在有较大构件,尤其是储油罐这种液固耦合作用比较强的构件存在时,振动台加速度响应无法满足实验要求。经过五次直接迭代运算后,效果如图20所示,两条曲线时滞基本消失,在加速度峰值较大处吻合良好。整体上相关系数达到0.9032,已能够满足实验精度要求。经五次修正迭代后,效果如图21所示,相关系数Kxy=0.9254,要优于直接迭代方法。值得指出的是,第三次迭代后,Kxy=0.9187,再经过多次迭代运算,精度提高幅度不大,这说明程序收敛性和收敛速度都比较好。
除了文中列出的试验结果以外,还将50cm水位下由修正迭代方法求得的输人命令直接应用到80cm水位工况中,研究在不同水位下控制效果。可见相关系数Kxy=0.8917,基本满足试验要求。另外,还验证了Taft波、人工波105gal能级下经迭代求得的输入信号扩大2.095倍当作220gal能级下的初始激励,研究在不同能级下控制效果,可见相关系数结果均在0.9以上(Taft波Kxy=0.9011)。限于篇幅,本文没有给出具体的试验结果。详细介绍可参见文献。
5.结论
本文通过数值模拟和实验研究了基于位移一加速度的直接迭代和修正迭代方法用于振动台加载控制的台面再现精度,得到主要结论如下:(1)基于位移一位移迭代学习控制方法对于位移的再现精度效果很好,然而对加速度的再现精度很不理想;(2)基于位移一加速度迭代学习控制方法对于加速度的再现精度效果很好;(3)与直接迭代方法相比,修正迭代方法收敛速度更快。
对于以位移控制为主的试验,建议采用位移一位移迭代控制方法;对于以加速度控制为主的试验,宜采用位移一加速度迭代控制方法。对于小型结构试验,建议采用相对简单的直接迭代方法;而对于大型结构试验,宜采用效果更好的修正迭代方法。
