改进遗传算法的结构随机控制系统优化分析
梅真 郭子雄 高毅超

摘要:结构主动/半主动控制效果与输入动力作用的性质、主动/半主动控制算法、减振装置的设置数目和位置等因素有关。为解决随机激励作用下、结构控制系统中控制器参数优化与作动器优化配置问题,提出一种改进的遗传算法。该遗传算法采用随机竞争与最佳保留相结合的选择策略,以提高计算效率;为避免交叉和变异操作产生违反约束条件的个体,发展了改进的二进制单点交叉和改进的单基因座与双基因座变异。数值算例分析表明,提出的改进的遗传算法计算精度高,收敛速度快,是一种有效的结构控制系统一体化优化分析方法。
关键词:结构振动控制;随机激励;最优控制;优化;遗传算法
中图分类号:TU352.1
文献标志码:A
文章编号:1004-4523(2017)01-0093-07
DOI:10.16385/j.cnki.issn.1004-4523.2017.01.013
引言
结构振动控制作为一种有效的结构保护技术受到越来越广泛关注。同时注意到,结构主动/半主动控制效果与输入动力作用的性质、主动/半主动控制算法、减振装置的设置数目和位置等因素有关。因此,有必要进行结构控制系统优化分析。
作动器/阻尼器的优化配置主要有两类分析方法:序列法和随机搜索法,其中,序列法又可分为累积法和逐步消去法。累积法是不断地从剩余的可选位置中,按照一定的准则选取一个最优的加到优化配置中去,直到达到预定的数目为止。李杰和彭勇波等在减振装置拓扑优化分析中采用了该方法。逐步消去法与累积法正好相反,它每次从剩余的可选位置中去掉一个或多个对优化目标函数贡献最小或较小的位置,直到只剩下预定数目的优化位置为止。孙万泉和李庆斌采用这种方法分析了主动控制作动器的优化配置问题。应当指出的是,采用序列法进行优化布置,忽略了各减振装置与被控结构之问的相互作用,因而得到的分析结果有可能并不是最优的。事实上,减振装置的优化配置问题一般可归结为组合优化问题,而遗传算法等随机搜索方法在解决组合优化问题方面表现出较为明显的优势,因此在这类优化问题中得到广泛应用。
在对减振装置进行优化配置的同时,还应对主动/半主动控制器进行优化设计,因为这两个方面共同影响了结构控制效果。目前的研究中,对减振装置的优化布置与控制器的参数优化大多分别进行,例如Abdullah等和Li等就分别采用两步优化的方法研究了控制系统的优化问题。注意到,这实际上是将本来相互耦合的两个方面的优化问题人为地割裂开来,因此,可能会对优化分析的结果产生负面影响。
此外,应当指出的是,目前基于遗传算法的控制系统优化分析中大多采用几条具有不同加速度峰值和频谱特性的典型地震动样本作为输入,而已有研究表明,不同地震动样本作用下,控制系统的优化分析结果往往不同。因此,结构控制系统设计时,应合理考虑外界动力作用的随机性,并基于一定的随机最优控制准则进行一体化优化分析。
鉴于以上研究现状,本文提出一种改进的遗传算法,以解决随机激励作用下、结构主动/半主动控制系统的一体化优化问题,即同时考虑控制器参数优化与减振装置优化配置,并通过数值算例验证其有效性。
1.结构随机最优控制
结构随机最优控制涉及两步优化:其一是,最小化性能泛函以建立控制律参数与控制增益之问的映射关系;其二是,基于一定的随机最优控制准则,优化控制律参数,与此同时,还要考虑减振装置的优化配置问题。
2.改进的遗传算法
遗传算法是模仿自然界生物进化机制发展起来的随机全局搜索和优化方法。以下将阐述基于改进遗传算法的控制器参数优化与作动器优化配置的分析方法。优化的参数为LQR算法中权矩阵R的系数6(权矩阵Q的系数取为定值a=100)以及主动作动器的布置位置。
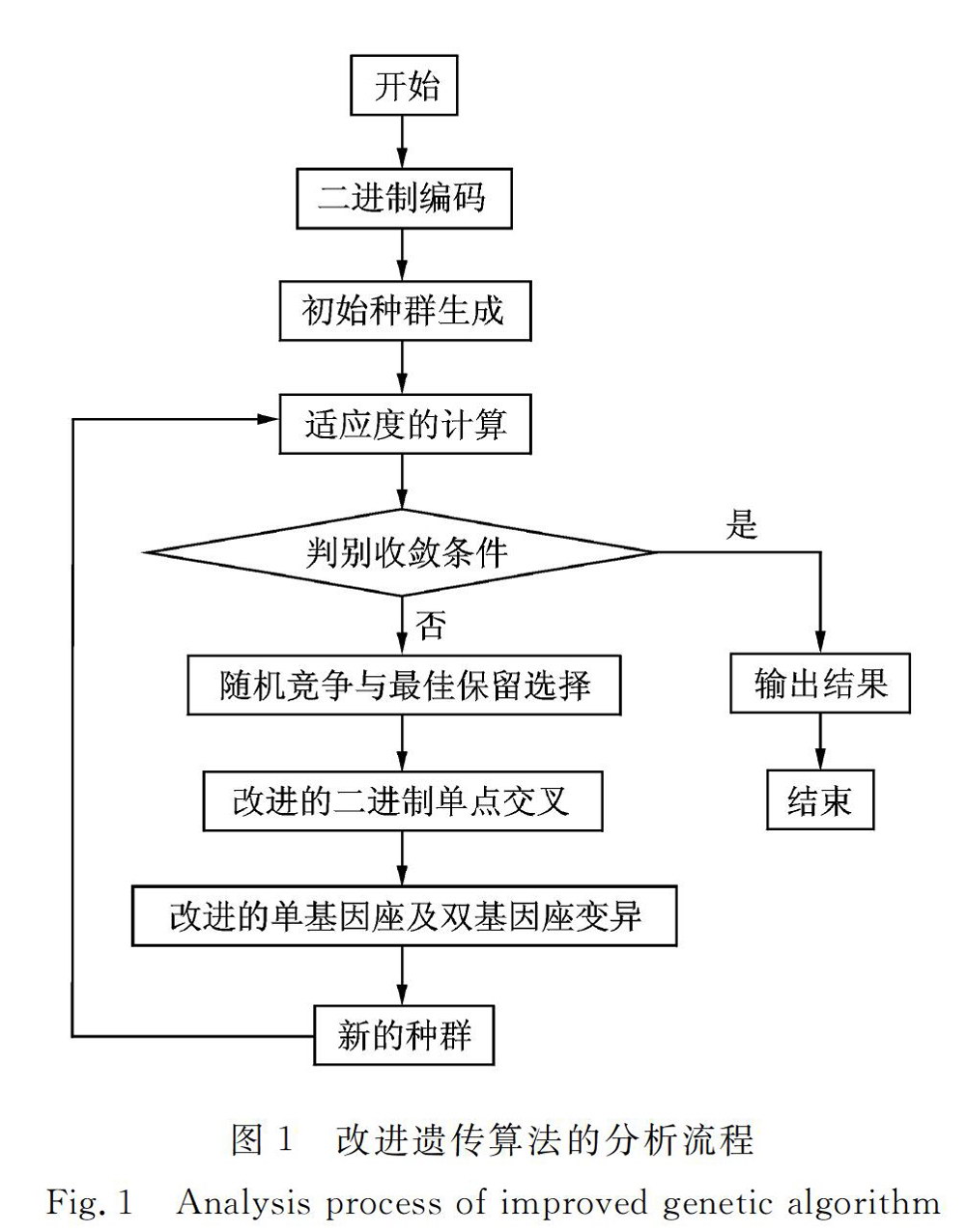
改进遗传算法的分析流程如图1所示。
2.1编码及初始种群的生成
编码是遗传算法的首要环节,本文采用常见的二进制编码方法。控制系统优化分析中包含LQR算法的参数优化和减振装置的位置优化,需要分别编码并连接成串以形成种群中的独立个体。对于权矩阵系数6,可采用20位的二进制串表示。对于主动作动器的位置优化,若被控结构共有n个楼层,在每层最多只布置一个作动器的前提下,一共有n个可选位置,则相应的编码长度为n。如果某一基因座上的基因值为1,则表示对应的位置上设置有主动作动器;反之,若为0,则表示对应的位置上没有作动器。
2.3随机竞争与最佳保留选择
选择又称复制,是在当前种群中选择生命力强的个体产生新的种群的过程。选择算子根据每个个体适应度的相对大小,依概率挑选能够复制到下一代种群的个体。当前的研究中,大多采用轮盘赌选择法。应当指出的是,该选择操作算子引起的误差一般较大,故对遗传算法的收敛速度甚至全局收敛性产生不利影响。为加快算法的收敛速度,本文采用随机竞争与最佳保留相结合的选择策略,以提高优化分析的计算效率。在随机竞争选择中,每次按轮盘赌选择机制选取一对个体,然后比较这两个个体的适应度,适应度高者被选中,如此反复,直到选满为止。在随机竞争选择操作完毕之后,将当前种群中适应度最高的个体完整地复制到下一代群体中,此即为最佳保留选择。最佳保留选择策略能够保证遗传算法终止时得到的最后结果是历代出现过的最高适应度的个体。
2.4改进的二进制单点交叉
交叉即基因重组,是指在种群中挑选出两个配对的个体,然后交换这两个个体的某个或某些基因座上的基因值。交叉运算产生子代,并且使子代继承父代的基本特征。为了使经过交叉操作产生的子代个体仍然满足诸如式(9)所示的约束条件,这里采用改进过的二进制单点交叉方法。具体操作方法如图2中的例子所示。
2.5改进的單基因座与双基因座变异
变异是以较小的概率对个体编码串上的某个或某些基因座上的基因值进行改变,进而生成新个体。在变异操作过程中一般也会产生不满足约束条件的子个体,因此本文采用改进的单基因座与双基因座变异相结合的办法。具体操作方法为:当变异基因座位于个体编码串1~20号位时,直接进行单基因座的变异,即“0”变为“1”,“1”变为“0”;当变异基因座位于个体编码串20号位以后时,则进行双基因座的变异,即从该个体大于20号位上随机选择一个基因值为1的基因座,再从基因值为0的基因座上随机选择一个,相互交换这两个基因座上的基因值即可。
2.6收敛准则
衡量种群适应度大小的两个重要指标分别为种群的最大适应度Fitmax和平均适应度Fitmean。这里采用Fitmax-Fitmean≤ε作为收敛准则,ε为一个较小的数。与此同时,控制遗传的代数,以取得较好的优化分析结果与计算效率。
3.数值计算及分析
假定被控结构为一个6层的单跨钢框架模型,其质量矩阵由该模型各部分的质量计算得到,刚度矩阵和阻尼矩阵可根据振动台试验结果识别得到;输入动力作用为随机地震动,由物理随机地震动模型生成,共有120条地震动样本时程,其加速度峰值的均值为2.18m/s2,变异系数为0.26。结构控制系统优化的参数为权矩阵R的系数6以及主动作动器的布置位置(假定6个楼层中选择两个楼层各布置一个主动作动器)。改进的遗传算法优化分析过程中,初始种群的个体数目取为16,每个个体中前20个基因座的基因值由正交设计法生成,21~26基因座的基因值由枚举法给出(其中有一种组合重复一次),且前后两个部分的编码随机组合连接成串;计算超越概率准则的目标函数J时所涉及的层间位移角峰值、绝对加速度峰值、控制力峰值的阈值或限制值分别取为0.005rad,4.0m/s2与10.0kN;交叉概率和变异概率分别取为0.8和0.005。
采用Matlab语言自行编制算法程序,最终得到的适应度收敛曲线如图3所示。由该图可见,本文提出的改进的遗传算法具有良好的收敛性能。计算到第3代时,种群的最大适应度已经非常接近优化分析的最大适应度值。第11代时,种群的最大适应度和平均适应度之差的绝对值小于10-6。遗传算法计算到第23代时,种群的最大适应度首次达到优化分析的最大适应度值,此时,权矩阵系数6为9.87×10-5,主动作动器布置于底层和第二层,目标函数J为1.49×10-7。
为了验证改进遗传算法优化分析结果的正确性,表1中给出了主动作动器设置于不同楼层时,由Matlab优化工具箱函数fmincon(采用序列二次规划法求解)以及简单遗传算法(采用二进制编码,初始种群随机生成,轮盘赌选择,单点交叉,单基因座变异)分析得到的结果。从该表中可以看出,fmin-con函数和简单遗传算法的分析结果吻合良好,权矩阵系数6和目标函数J的相对误差一般分别不超过8%与1%;当主动作动器设置于底层和第二层时,能够获得相对最优的随机控制效果,且此时3种不同优化方法得到的权矩阵系数6的数值亦较为接近,最大相对误差仅为2.9%。由此可见,改进遗传算法的优化结果与Matlab优化工具箱函数fmin—con以及简单遗传算法的分析结果均是一致的,表明本文提出的算法具有较高的计算精度。
与表1中工况1对应的简单遗传算法的适应度收敛曲线如图4。由图可见,计算到第9代时,种群的最大适应度接近优化分析的最大适应度值;第33代时,种群的最大适应度和平均适应度之差的绝对值为7.5×10-5;第41代时,种群的最大适应度首次达到优化分析的最大适应度值。对比图3和4中相应的适应度收敛曲线不难看出,本文提出的改进遗传算法比简单遗传算法的收敛速度更快。
图5中给出了主动作动器不同配置时(对应于表1中工况1。以及工况1~6,其中工况1~6采用fmincon函数的优化结果),受控结构层间位移角极值的概率密度函数及累积分布函数曲线。由图可见,作动器的布置位置对于结构随机控制效果具有显著影响,故有必要进行包含减振装置优化配置在内的结构控制系统一体化优化设计。
4.结论
本文提出了一种改进的遗传算法,有效地解决了结构控制系统的一体化优化问题,即在合理考虑环境激励随机性的同时,实现控制器的参数优化与作动器的优化配置。该遗传算法在初始种群的生成、适应度函数的选取、选择策略、交叉与变异操作等方面有針对性地进行了创新与完善。数值算例表明,该算法具有较高的计算精度和较快的收敛速度,是一种有效的结构控制系统优化分析方法,可供其他研究人员参考。
应当指出的是,本文结构控制系统优化分析数值算例中,假定主动作动器的设置数目为一个定数,而未将其列为待优化的参数之一。考虑减振装置设置数目的结构控制系统一体化优化分析问题,有待在本文工作的基础上进一步深入研究。
