应用磁流变技术的星箭界面半主动隔振研究
程明 陈照波 杨树涛 潘忠文 吕文香
摘要:发射阶段经受的恶劣振动环境,往往造成卫星发射失败。为了改善卫星在发射阶段的振动环境,提出了一种基于磁流变技术的星箭界面半主动隔振平台,用来替换传统的用于星箭连接的锥壳适配器。分析了布置参数、刚度系数、阻尼特性等主要特性参数对隔振平台传递特性的影响。搭建了星箭界面隔振实验平台,采用天棚阻尼控制策略,对隔振平台进行半主动控制。利用正弦扫频激励完成了模拟实验,实验结果表明:隔振平台原理可行、主要特性参数可调、隔振效果良好。
关键词:半主动控制;隔振平台;星箭界面;磁流变阻尼器
中图分类号:TB535;V414
文献标志码:A
文章编号:1004-4523(2017)01-0086-07
DOI:10.16385/j.cnki.issn.1004-4523.2017.01.012
引言
目前,各类人造卫星已经在通讯、导航、环境监测、地质勘探、测绘和军事等领域发挥巨大作用,人造卫星发射数量约占航天器发射总数的90%以上。然而,在航天器的整个寿命周期内,其在发射过程中经受的振动环境最为恶劣。恶劣的振動环境往往是造成航天器发射失败的主要原因,另一方面,仪器设备的精密化对航天器上动力学环境提出了更高的要求。
传统星箭连接适配器通常为用蜂窝铝材料制成的锥壳结构,它具有质量轻、强度高等优点,但其刚度通常较大,结构材料的耗能能力微弱,导致锥壳适配器对卫星隔振的效果较差。星箭隔振技术,即在不改变卫星结构的前提下,利用具有隔振性能的适配器替代原有的刚性过大的锥壳适配器或在原来的适配器与星箭界面之间加入一套隔振系统,减小卫星发射时所承受的环境载荷,降低对卫星及其设备的动态性能要求。
星箭隔振技术的研究起始于20世纪90年代初,主要集中在航天技术发达的美国和欧洲等国家。1997年美国空军研究实验室(AFRL)和CSA工程公司联合研制出世界上第一个星箭被动隔振装置(SoftRide UniFlex)。SoftRide UniFlex是一种轴向隔振装置,该装置是由多个内部粘贴有约束层阻尼结构的钛合金压力环组成。这种隔振装置的优点是不改变原有适配器结构,只是在原适配器和卫星的连接界面接入隔振装置,利用约束层阻尼结构提高系统的阻尼从而有效抑制轴向谐振频率的响应幅值,达到轴向隔振目的。在美国菲利普空军实验室(AFPL)的资助下,Wilke等研制出了星箭横向被动有效载荷适配器(IPAF),实验结果表明该隔振系统对25~40Hz范围的横向振动载荷具有很好的抑制作用。但是IPAF比传统的适配器弯曲刚度低,容易导致卫星与整流罩碰撞。2003年Honeywell公司研制出EL-VIS隔振装置,该装置由8个液压一空气式作动筒和金属管网组成主被动一体化振动控制系统,对横向和纵向振动响应均具有良好隔振性能,但存在质量大、系统结构复杂等缺点。
磁流变阻尼器是一种用于半主动控制的理想元件,具有良好的可控性、可逆性和快速响应等优点。近几年,关于磁流变阻尼器应用于汽车悬架、高层建筑以及大型桥梁振动控制方面的研究比较广泛,并取得一些重要的突破,然而,将磁流变阻尼器应用于星箭系统进行半主动隔振的研究不久前才出现。Jean等结合磁流变阻尼器和Stewart并联结构搭建了一种星箭隔振平台,通过实验研究取得了不错隔振效果,但研究过程中并没有考虑一些关键结构参数对隔振性能的影响。涂奉臣等将磁流变阻尼器安装在曲杆固接式隔振平台上,通过模糊最优控制策略进行控制。王强等设计了一种立方体六轴隔振系统,结构上具有一定的解耦优势。目前,应用磁流变阻尼器进行半主动星箭隔振的研究到实际应用还有一段距离,平台结构参数对隔振性能影响以及控制策略的效果和可靠性等还需进一步研究和验证。
1.六自由度隔振平台
1.1隔振平台整体结构
Stewart机构具有多自由度运动控制的特点,并且还能够与多种形式的主动或半主动作动器件结合起来,实现主动或半主动的振动控制。结合星箭隔振的技术要求以及Stewart机构的结构形式,设计了一种星箭界面半主动隔振平台,用来代替传统的锥壳适配器。
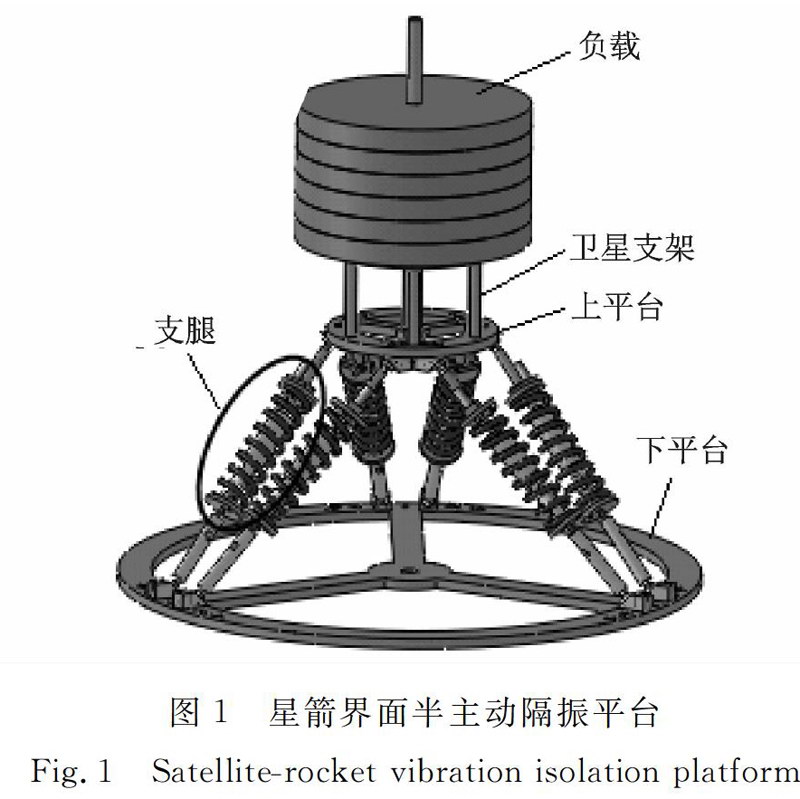
隔振平台(如图1所示)的上、下平台分别与卫星支架和基础相连,负载用来模拟卫星。为了保证平台结构的对称以及便于装配时的精确调整,将上、下平台设计为圆环形。支腿的上、下球铰不能与平台直接连接,需要设计一个球铰座。将球铰座设计成带斜面的滑块状,通过调整球铰座的安装方位来使球铰满足运动范围限制。
1.2隔振平台支腿
完成设计的支腿结构如图2所示,磁流变阻尼器置于弹簧内,与弹簧并联。弹簧选用圆截面螺旋弹簧,置于上、下挡板之问,上挡板通过轴套与上球铰相连,下挡板与螺杆相连,旋转螺杆可以调节整根支腿的长度。位移传感器选用LVDT传感器,本体通过夹具与上轴套固连,其活动杆下端黏接一块径向磁铁,磁铁吸附在磁流变阻尼器的端面上。拉压力传感器与磁流变阻尼器通过轴套串接。位移传感器实测磁流变阻尼器的位移量,位移信号传到控制器进行微分处理后得到支腿与上、下平台的两个连接点的相对运动速度。拉压力传感器实测磁流变阻尼器的拉压力,这种集成了拉压力传感器的结构设计便于进行多种控制策略的研究与验证。上、下平台通过球铰与支腿连接。
2.主要特性参数
星箭界面隔振平台的隔振效果,是通过隔振平台的固有频率的大小,以及上、下平台的加速度传递率进行评价。隔振平台具有六个自由度,包括上平台的3个平动和3个转动,两个横向方向上的平动和转动振型分别相互耦合。由于星箭界面半主动隔振平台是关于中轴线的对称结构,其在两个横向上的振型是一致的。设计隔振平台的纵向共振频率为10Hz左右;一阶横向共振频率为3Hz左右,二阶横向共振频率为9Hz左右。动态调节阻尼系数来改变系统固有特性,实现上、下平台的加速度传递率在共振区被抑制,而在高频区不恶化。
主要特性参数包括球铰座的安装位置、弹簧的刚度系数、以及磁流变阻尼器的阻尼系数,它们的改变对隔振平台的传递特性都会产生影响。
2.1球铰座安装位置
球铰座的安装位置影响着支腿的空间布局,间接影响着隔振平台固有特性,包括固有频率以及传递率。球铰的安装位置主要由圆周直径φ、中心角a两个参数决定,但由于受到其他结构的尺寸限制,直径φ已经确定,安装在上平台上的球铰座的可调范围很小。分析过程中认为安装在上平台上的6个球铰座的位置固定,只调节下平台上的6个球铰座的安装位置。下平台上6个球铰座中相邻两个之间的中心角为a,6个球铰座两两关于下平台的轴线对称布置,如图3所示。
随着下平台上球铰座安装位置的中心角a的增大,隔振平台纵向传递特性并没有发生多大变化,而对横向传递特性产生的影响非常显著。随着中心角a的增大,横向一、二阶共振频率减小,一阶共振区的传递率下降,二阶共振区的传递率有所升高,高频区的传递率几乎没发生什么变化。两个特殊中心角对应的分析结果,纵向传递特性如图4所示,横向传递特性如图5所示。
卫星在发射阶段,受到的各种准静态及动态载荷的激励作用主要是沿纵向方向,因此纵向隔振效果是主要考察指标。另外,受到纵向隔振效果的限制,隔振平台的一阶横向固有频率较小。增大下平台上球铰座安装位置的中心角,横向一阶共振区的加速度传递率有所改善,但一阶横向固有频率却下降明显,表明这种情况下隔振平台的横向刚度较小,容易导致隔振平台发生倾覆失稳。因此,球铰安装位置的确定需要综合考虑其对隔振平台的传递特性以及稳定性的影响。
2.2弹簧的刚度系数
六根支腿都可以进行伸缩运动,星箭界面隔振平台的上平台具有六个自由度,分别为沿三个方向平动以及绕三个方向转动。卫星通常与适配器是对中安装,在卫星发射过程中,适配器沿横向方向受到的偏载很小。沿纵向方向上,六根支腿可以当作是均匀受力的,上平台只进行上下平动,隔振平台只表现出一阶固有特性;沿横向方向上,上平台既有平动也有转动,表现为二阶固有特性。
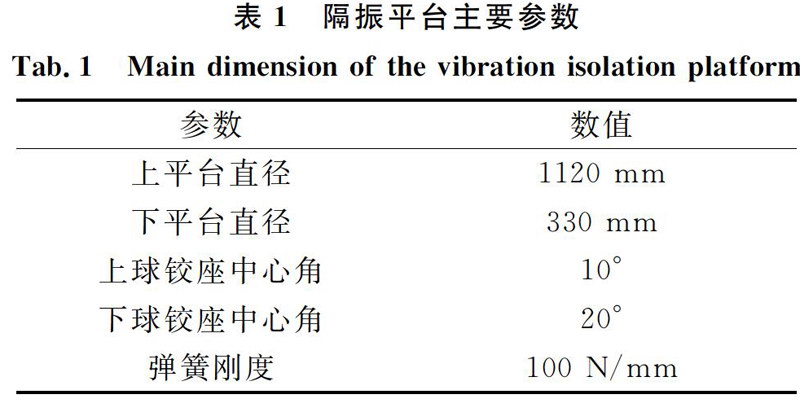
弹簧的刚度参数直接影响着隔振平台的固有频率的大小,调整弹簧的刚度系数,得到纵向传递特性如图6所示,横向传递特性如图7所示。纵向或横向上,隔振平台的固有频率都是随着弹簧刚度的增大而增大。当弹簧刚度为100N/mm时,仿真得到隔振平台的传递特性如图7所示。隔振平台的纵向共振频率为9.11Hz;横向一阶共振频率为2.34Hz,横向二阶固有频率为9.12Hz。
2.3磁流变阻尼器的阻尼特性
振动系统中的阻尼是通过机械能的耗能来表现,阻尼器就是利用阻尼特性来减小振动幅度的装置。保持其他参数不变,调节隔振平台动力系统的阻尼系数,得到纵向传递特性如图8所示,横向传递特性如图9所示。
沿纵向方向,随着阻尼系数增大,上、下平台的加速度传递率在共振区依次减小,但在高频区却逐渐恶化。沿横向方向,随着阻尼系数的增大,上、下平台的加速度传递率在一阶、二阶共振区依次减小,但在一、二阶共振区的中间区域以及高频区却恶化明显。
磁流变液是由高磁导率、低磁滞性的微小软磁性颗粒和非导磁性液体混合而成的悬浮体。这种悬浮体在零磁场条件下呈现出低黏度的牛顿流体特性;而在强磁场作用下,则呈现出高黏度、低流动性的Bingham体特性。磁流变阻尼器(MRD)就是利用磁流变液的磁流变效应而设计的阻尼耗能装置。磁流变阻尼器具有结构简单、阻尼力连续可调、响应快、出力大、而且耗能小、可靠性高等优点。系统的阻尼系数主要是由磁流变阻尼器的阻尼特性决定,具体表现为与位移、速度、电流相关的阻尼力大小。星箭界面半主动隔振平台,则是通过半主动控制策略来动态调节磁流变阻尼器的阻尼力大小,从而实现对卫星的隔振。
3.星箭界面隔振实验
3.1半主动控制策略
半主动隔振实施控制力的作动器只需要少量的能量调节,便可以尽可能实现主动控制力。半主动隔振不需要主动向结构输入能量,而是巧妙运用外加的可调阻尼装置(磁流变阻尼器)以控制系统的动力学特性,从而实现对最优响应状态的追踪。半主动控制系统结构比较简单,无需外界能源驱动,易于实现,能够达到与主动隔振相差不多的控制效果。
天棚阻尼控制算法是经典的半主动控制算法,常常用于汽车悬架隔振系统,算法思想简单,隔振效果往往能达到期望要求。“假想天棚阻尼模型”(如图10所示)是假想负载上方总有一个固定不动的“天棚”,负载与天棚之间通过假想阻尼器进行连接。
然而在实际情况中,不可能存在这样一个通过阻尼器与负载连接的固定不动的“天棚”,因此,常常用一个“实际磁流变阻尼器模型”(如图12所示)去实时等效“假想天棚阻尼模型”。
基于天棚阻尼半主动控制策略,本文是将隔振平台这个六自由度系统看作6个相互独立的子系统进行单独控制(不考虑相互影响),分别以六根支腿的运动情况作为基础,应用“天棚阻尼”半主动控制策略对六根支腿进行分别控制。
控制过程中,通过位移传感器测量并进行微分运算得到磁流变阻尼器的相对运动速度,通过加速度传感器测量及积分运算得到阻尼器两端连接点的绝对速度,然后运用式(5)所示的控制率对单个阻尼器的出力状态进行调整,进而改变系统的阻尼特性。当阻尼力取最大时,通人磁流变阻尼器允许的最大电流;当阻尼力取最小时,通入磁流变得電流为0。
3.2实验平台搭建
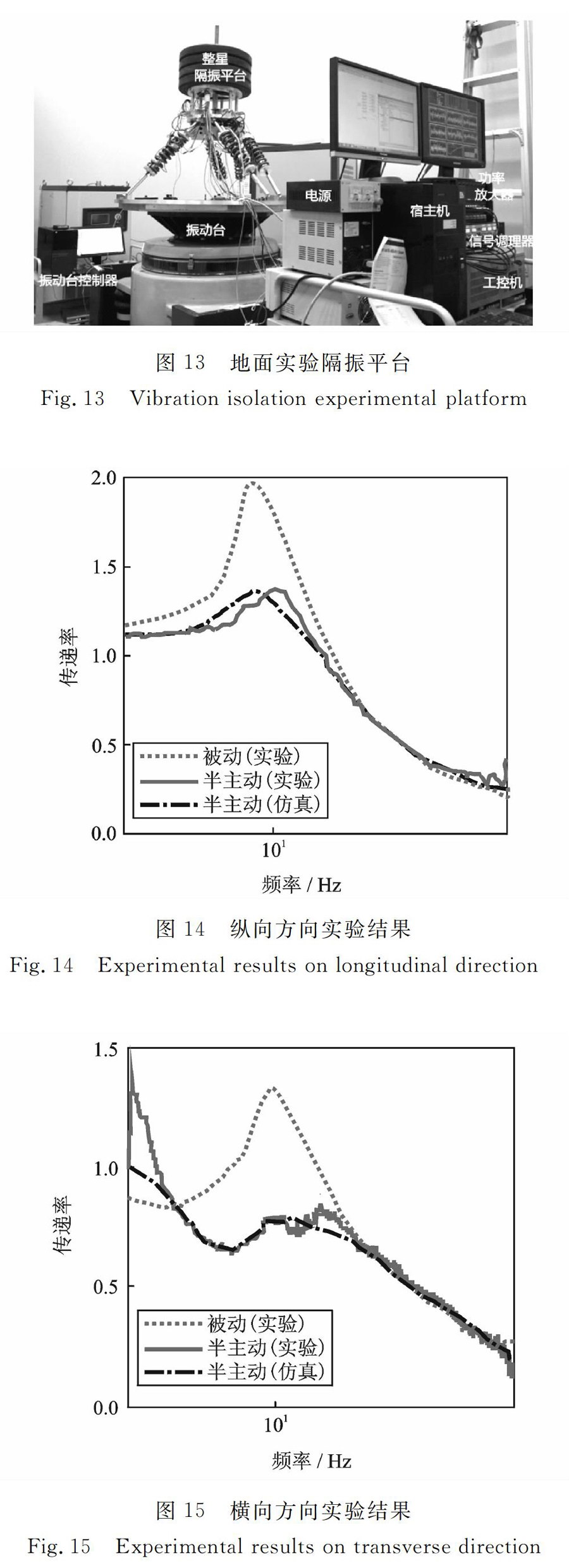
验证设计的星箭隔振平台的隔振效果,搭建星箭界面地面实验隔振平台,如图13所示。实验平台的主要参数如表1所示。实验平台由星箭隔振装置、激励系统和测控系统三部分组成。星箭隔振系统包括上平台、下平台、6根支腿、卫星支架和负载;激励系统主要由振动台和振动台控制器组成;传感器、实验仪器、控制计算机、快速原型控制系统和功率放大器等组成了测控系统。
宿主控制计算机将控制程序编译、下载到目标计算机中,并控制运行。同时振动台控制器控制振动台,使其产生所需的激励,星箭隔振系统开始工作并产生响应状态量。通过传感器及实验系统,将星箭隔振系统中的物理量转换为电信号,并被目标计算机的控制程序采集。采集的电信号经过控制算法演算后得到控制信号,功率放大器驱动并改变MRD动力特性,从而实现对星箭隔振系统的振动控制。
3.3实验验证
给星箭隔振平台的下平台施加纵向扫频激励,分别测试在被动情况下和在天棚阻尼半主动控制情况下的隔振效果,并将半主动控制的实验结果与仿真结果进行了对比,如图14所示。沿横向施加扫频激励,得到横向上对应的结果如图15所示。
从图14可以看出,星箭隔振系统的纵向固有频率约为9.16Hz,与仿真得到9.11Hz比较接近,隔振系统设计方法合理。由于磁流变阻尼器在工作过程中提供了一定的附加刚度,隔振系统的实际固有频率略有偏大。而在半主动控制下,磁流变液在磁场作用下会呈半固态,磁流变阻尼器会产生比被动下大的附加刚度,隔振系统在半主动控制下的固有频率大于在被动下的固有频率。半主动控制的试验结果与仿真结果比较吻合。
比较天棚阻尼半主动控制和被动的横向隔振效果,在低频区天棚阻尼半主动的隔振效果非常明显,被动情况下的共振峰传递率为1.97,天棚阻尼半主动控制情况下的共振峰传递率为1.35,相对于被动降低31.5%左右。而且,在高频区天棚阻尼半主动隔振效果没有被恶化。半主动控制的试验结果与仿真结果比较吻合。
由于振动台的限制(起始频率为5Hz),横向方向上的一阶固有频率没有体现出来,二阶固有频率为9.6Hz,与仿真得到的9.12Hz接近。在天棚阻尼半主动控制的情况下,低频区隔振效果较好,高频区的隔振效果也没有恶化。
4.结论
基于磁流变阻尼技术设计了星箭界面隔振平台,分析了主要特性参数包括球铰座的安装位置、刚度系数、以及阻尼系数对隔振平台的固有特性的影响:球铰座的安装位置对纵向方向上的传递特性影响不明显,而对横向方向上的传递特性影响显著;弹簧的刚度系数决定着隔振平台的固有频率;阻尼特性对隔振平台的传递率的大小影响较大。
搭建了星箭界面隔振实验平台,采用天棚阻尼控制策略,实现了对平台的半主动隔振控制。系统的动态特性测试结果与仿真结果吻合,半主动隔振的整体效果良好。
