机器人教育中的逆向工程教学模式构建
康斯雅 钟柏昌
摘要:逆向工程作为一种通过对目标产品的逆向分析和研究来实现产品优化与再创造的过程,在工程类专业课程的教学中具有广阔的应用前景。针对机器人教育这一新的教育领域,传统教学方法难以充分发挥其教育价值,而逆向工程法却体现出较为明显的优势和适用性。为应对机器人教育中的逆向工程法应用所存在的教学模式单一现象,从复原实验和重构实验两个层面提出了解构复原型、纠错复原型、要素增减型、结构创新型等四种机器人教育中的逆向工程教学模式,进而构建了“灯笼模型”对上述教学模式的各环节进行形象化呈现。其中,解构复原型教学模式侧重以“拆分-复原”的方式让学生掌握目标产品的基本构成和实现方法;纠错复原型教学模式侧重以“纠错-复原”的方式让学生掌握目标作品的工作机制和实现方法;要素增减型教学模式侧重以“分解-要素增减”的方式开拓学生思维;结构创新型教学模式侧重以“分解-结构再造”的方式促进学生实现知识应用和创新实践。上述教学模式都强调将学生代入原产品设计者的身份意识,均具有“造物”的特征,在应用时应当根据实际情况加以灵活选择、调整和组合。
关键词:逆向工程;机器人教育;教学模式;解构复原型;纠错复原型;要素增减型;结构创新型
中图分类号:G434 ? 文献标识码:A ? ?文章编号:1009-5195(2019)04-0056-09 ?doi10.3969/j.issn.1009-5195.2019.04.007
一、引言
逆向工程(Reverse Engineering),又称反求工程或反向工程,是以先进产品的实物、样件、软件等作为研究对象,通过现代设计理论、方法、测量技术对已有产品进行建模、仿真,最终实现优化既有产品和再创造的过程(黄诚驹,2004;祖文明,2011)。Shooter(2008)认为如果将设计理解成产品的功能到形式的转变,那么逆向工程就是从产品的形式到功能分析的转变。近年来,许多研究者对逆向工程的教学应用进行了分析与讨论,这些研究主要侧重于高等教育中的工程类课程。已有研究表明逆向工程具备很多优势,可以促进大学工程类专业学生的概念学习(Hess,2000),有助于提升学生的学习动机(Ogot,2002;Barr et al.,2000)和学习能力(如创造力、理解力、动手能力、洞察能力),也有助于加速产品和工艺的开发进程(Huang,2011;Hess,2002;Lee et al.,2003)。
随着基础教育新课程改革的不断深入,我国中小学机器人教育有了较快发展,其教育价值已初步获得社会认可(钟柏昌,2016a)。问题解决、项目教学等多种教学方法被广泛应用于机器人教育中,但这些应用通常是对教学过程的简单照搬,并未体现出机器人教育的工程特性。如何才能充分发挥机器人课程的教育价值,在教学过程中激发学生的发散思维和迁移应用能力,使机器人技术与广泛的社会应用相结合,尚需探寻具有针对性的教学模式(钟柏昌,2016b)。已有研究证实了逆向工程法在工程类学科中的教学优势,而中小学机器人教育作为一种典型的工程教育类课程,逆向工程法在其教学过程中的的适用性也毋庸置疑,但如何有效应用仍需进一步思考。为此,本文将逆向工程方法引入中小学机器人教育,试图探索适用于中小学机器人教育的逆向工程教学模式分类体系和操作模式。
二、逆向工程法教育应用研究综述
1.逆向工程教学模式的构建研究
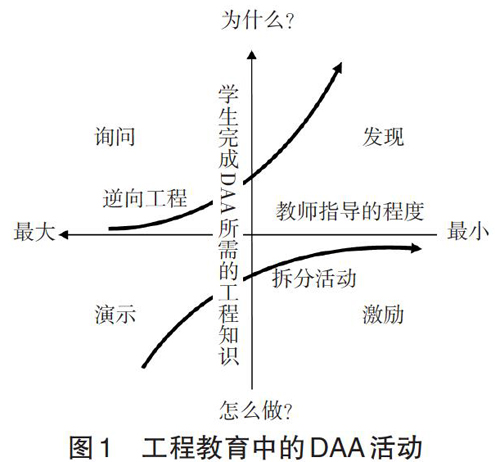
逆向工程最早出现于二战时期,在飞机、坦克以及其他军事装备的开发中扮演着重要角色,而将逆向工程应用于教育的研究出现于二十世纪末。其中,有两个较具代表性的研究。一个是Otto等(1998)提出的逆向工程与再设计“十步法”,其在教育和工业领域均产生了非常重要的影响。其中,逆向工程的实施过程共包含三个阶段,分别是逆向工程阶段、建模与分析阶段、再设计阶段;“十步法”则针对其中的再设计阶段的操作步骤进行了详细的描述。该教学模式在德克萨斯大学、麻省理工学院和美国空军学院被广泛应用,研究结果显示,逆向工程有助于解决不同类型学生的学习需求,但在操作时间和项目迭代设计等问题上,仍需要在课程结构上做进一步的设计和改进(Wood et al.,2001)。另一个代表性研究是Kremer等(2006)提出的“拆解-分析-装配”(Disassemble-Analyze-Assemble,简称“DAA”)过程模型。DAA活动可以按图1所示的两个维度进行分类:教师指导的程度(见横坐标)和学生完成DAA活动所需的工程知识(见纵坐标);两个维度交叉共形成了四种不同水平的活动类型,分别命名为演示(Expose)、激励(Inspire)、询问(Enquire)、发现(Discover)。研究者将该模型应用于高等教育工程类课程,并从工程教育的角度出发,完善了每种活动类型的教育目标。
国内有关逆向工程的教育研究起步较晚,但如同国外该类研究的发展脉络一样,研究者最初将逆向工程视为一种技术课程的教学内容,而非教学方法,直到近几年才出现有关逆向工程教学模式的研究。例如,吴兰岸等(2016)提出了一种技术支持下的逆向工程学习模式,该模式在大数据、3D打印、知识发现与数据挖掘等技术的支持下,將逆向工程划分为从领域理解到应用结果的6个阶段,试图通过解构和分析高精尖产品,引导学生学习技术原理、设计原理和工艺流程。例如,在“关键字检索的视频画面定位技术”的学习中,学生通过拆分和学习已有脚本代码,创造性地编写出多种类型的微课和课件的脚本格式。
上述逆向工程教学模型大多从产品需求分析的角度出发,将分析旧产品和生产新产品作为主要目标,因其存在流程单一、缺乏多样性的不足,故难以广泛有效地应用。笔者认为,为全面发挥逆向工程法的教学优势,需针对不同的教育目标和教育内容,构建基于逆向工程法的多元教学模式。
2.逆向工程在教育领域中的应用研究
除探索逆向工程教学模式外,更多研究者将逆向工程应用于机械工程、电子工程和软件工程等工程类专业的教学,其中大多数针对机械产品的再设计。例如,Hess(2002)将固体建模和逆向工程用于工程专业二年级学生的机械制造课程教学,在经过为期14周的车床零件焊接、塑料成型、零件再设计的学习后,学生的概念理解能力、学习兴趣、创造力和想象力都得到了提升。韩凤霞(2015)为培养学生的创新和实践能力,在开放实验中将逆向工程与自动编程技术相结合,通过对可乐瓶进行测量、数据处理和重构,培养学生在现代设计与制造工程领域的实践能力。滕志霞等(2015)将逆向工程应用于软件工程课程教学,其教学过程包括使用软件、提出需求、软件改造、编码分析、总体设计、设计验证和过程回顾,研究结果表明逆向工程法有助于学生消化理论知识并将其与实践结合。周灿(2016)将逆向工程应用于三维设计软件的教学之中,让机械类专业学生对虎口钳进行零件拆分、数据测量和重新组装,研究表明此过程更贴合企业生产实际,更能锻炼学生的综合能力并激发其创造力和协同能力。
还有研究将学习产品的组成结构和功能原理等基础知识作为教学目标。例如,West等(2008)以网络基础设施为工具,通过产品拆解和逆向工程向中学生介绍工程学知识。学生以小组为单位完成相应的任务,并在课上进行有关科学与工程的实时兴趣测试,实验数据表明学生的学习兴趣得到了提升。滕水生(2016)将逆向工程思维应用于模型制作课程,让学生通过分析木质家具的材料、加工方式以及榫卯连接的形式,来理解木质材料的特性以及榫卯结构。教学效果分析显示,逆向工程法可以让学生达到举一反三的学习效果,并可增强其创新思维和实践动手能力。
相较而言,使用逆向工程法分析产品故障并重新设计产品的教学实例较少。笔者仅发现一例相关研究,即Board(2012)运用逆向工程方法教授高中生CAD和测量技能,其认为对机械进行拆解、结构测试和故障分析的过程可以提升学生的学习兴趣和动手能力。
综上所述,大多数研究主要从产品需求出发,将产品再设计作为主要教学目标,针对其他教学目标的实例相对较少。笔者认为,为了培养学生的创新思维、概念理解和问题解决能力,教师在运用逆向工程法时,可以结合教学目标来选择教学过程,因此,有必要从教学目标出发开展逆向工程教学模式的分类与构建。此外,上述研究大多是逆向工程法在高等教育及职业教育工程类学科教学中的应用,但其在基础教育领域的应用极为匮乏,因此,将逆向工程法引入基础教育的教育价值和应用前景值得期待。
3.逆向工程在中小学机器人教育中的应用
笔者所在团队近年来进行了若干将逆向工程理论应用于中小学机器人教育的尝试。例如,将逆向工程思想用于指导实验模拟型教学项目,以“自动变速风扇”为例介绍运用逆向工程思维理解工程设计的过程,让学生通过观察、分析风扇的结构和功能,学习相关知识(李婷婷等,2017)。并在此基础上,进一步探讨了机器人课程中学生纠错能力的培养方法问题(Zhong et al.,2019)。此外,笔者所在团队还将逆向工程思想作为探索机器人教学模式的指导理论之一,将其应用于发明创造型教学模式的构建。在该模式的“微创新”阶段,研究者将DAA活动与工程设计思想相结合,引导学生通过对产品的体验、解构、分析、再设计、测试与调试等5个环节体验“微创新”的过程(闫妮等,2018)。
中小学机器人教育是一门典型的工程教育类课程,具有丰富的教育价值(钟柏昌等,2018)。为实现其应有价值,有必要在参考运用逆向工程法的已有工程教育应用及研究的基础上,针对中小学生的知识和能力水平,进一步探索逆向工程法在机器人教育中的具体教学模式,扩展和丰富已有研究成果。
三、逆向工程教学模式的分类框架
尽管学界对于逆向工程教学模式的理解不尽相同,但不可否认的是,构建一个合理的分类框架有助于逆向工程教学模式的推广与实施,也有助于演化出新的教学模式。为此,本文从逆向工程的教学目标出发,在学生有意义的学习成果中寻找分类线索。需要特别说明的是,为了满足各种可能的教育教学需求,此处所谓的“产品”可以是市场上销售的机器人产品,也可以是师生自主制作的机器人作品,为行文方便而统称为“产品”。
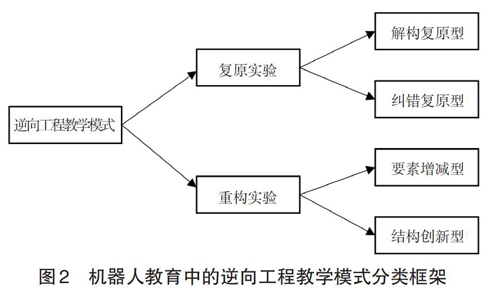
根据不同的教学目标,可以将机器人教育中的逆向工程教学模式作图2所示的分类。该分类方式将逆向工程教学模式分为复原实验和重构实验两类:复原实验侧重于对机器人产品概念、结构和功能等基础知识的理解与掌握,物化成果为复原的完整产品;重构实验则是在理解和掌握机器人概念、结构和功能的基础上增加创新元素,其物化成果不仅是复原的产品,更是创新后的新产品。
上述两类实验还可以分别作进一步的细分。就复原实验而言,根据任务分类的方向性原则(Zhong et al.,2016),可以从正向和反向的角度进行分类。教师在开展复原实验时可以提供正常的機器人产品,也可以提供存在故障的产品,本文将前者定义为解构复原型教学模式,后者定义为纠错复原型教学模式。其中后者主要指教师人为设计纠错任务,或是提供已损坏或功能缺失的残缺产品,让学生接受系统的纠错任务训练并发现故障的原因,进而复原产品功能(李婷婷等,2017)。
在重构实验中,根据重构作品的难易程度和创新程度亦可作进一步的区分。对原创事物的改变或调整存在不同的水平等级,从教育心理学的角度,可以将其划分为适合近迁移的要素增减和需要远迁移的结构创新两类(钟柏昌,2018)。前者是指学生在教师的指导下对机器人产品的要素或参数等进行修改,是在原产品基础上的简单改造,本文将其定义为要素增减型教学模式,此模式有助于知识的近迁移;后者则是一种结构创新型教学模式,与要素增减型教学模式不同,其要求学生具备一定的跨学科综合能力,能够对原有机器人产品进行结构性重组(再设计),有助于学生知识的远迁移。
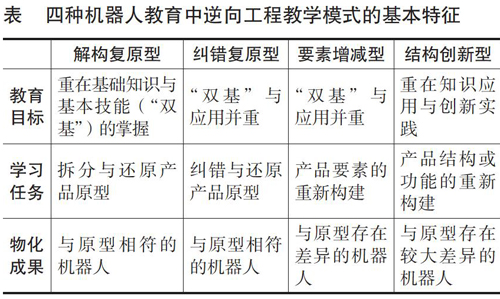
以上四种教学模式的基本特征详见下表。其实施过程如图3所示,因形似灯笼,也可将其称为“灯笼模型”,后文将对其作详细介绍。当然,并不排除在这个分类体系中存在其他教学模式的可能,如处于四种教学模式的中间状态或混合状态的教学模式。整体而言,四种教学模式虽有不同,但也存在明显的共性,即从试用与感知开始到评价与总结结束,各自中间的两个关键环节均是一个循环迭代、逐步完善的过程。
四、四种逆向工程教学模式的解析
1.解构复原型教学模式
解构复原型教学模式是指学生在教师的引导下,经历一个对机器人产品进行分解与复原的探究过程,其实施过程主要包含试用与感知、分解与观察、还原与测试、评价与总结等四个环节。
试用与感知环节是指通过试用一个或多个产品,吸引学生注意,激发学习兴趣,形成用户体验并对目标产品的设计意图、功能、材质和基本构成等形成初步认识。其基本要求包括以下三个方面:其一,教师应根据项目或任务的主题要求准备现成的机器人产品供学生试用,且产品应具有一定的趣味性或新颖性;其二,产品应具有可拆分性,其分解难度应与学生能力基础相适应,不宜过于容易或复杂;其三,教师应鼓励学生以口头或书面的方式形成简洁的用户体验报告,为方便学生填写,也可以提供半结构化的表格,并通过提问、观察等方式及时把握学生的体验与感悟,确保学生对产品的认知与预设的项目任务一致。
分解与观察环节是指通过对产品的解剖,满足学生的好奇心,培养学生的动手操作能力,了解产品的内部结构和工作机制。其基本要求包括以下三个方面:其一,教师应结合学生能力基础调节产品拆分的形式。例如,初学者可以遵循“小步子”原则逐步拆分和复原,而对于具备一定操作经验和能力的学生则可以结合说明书按序分解,或在没有任何说明书的前提下直接分解。其二,为方便指导学生的操作并规范拆分行为,教师可以提供半结构化的产品拆分表格,要求学生学会观察和测量,做好拆分记录(如拆分顺序,涉及零部件或结构的位置、距离、大小等信息),必要时可以允许学生拍照记录。其三,分解的目的不是单纯的解构,还要学会观察、了解产品的组成结构和实现原理。因此,教师需在拆分过程中给予适当的提示和引导,调动学生的求知欲,确保学生理解各零部件的作用和相互关系。
还原与测试环节是指通过对产品的正确复原,培养学生的责任心和动手操作能力,检验学生对产品结构和工作机制的熟悉程度。其基本要求包括以下四个方面:其一,教师应结合学生能力基础调节产品复原的形式,除了依照“小步子”的原则外,对于具备一定操作经验和能力的学生还可以结合拆分记录按序复原,或在不参考拆分记录的前提下凭记忆复原。其二,为确保机器人产品的完整性和稳定性,教师应鼓励学生进行迭代测试,做好观察与测试记录(如产品是否成功运行、安装误差分析、复原成功时间等)。其三,此环节的目的不是单纯的还原,还要学会巩固理解各零部件的作用和相互关系,因此,教师可以在学生复原操作的过程中以提问或评论的方式予以强化。其四,由于机器人产品的分解与还原不仅涉及硬件结构,还涉及控制板中的程序,而预先上传(烧录)到机器人控制板的程序是没有办法直接进行拆分的。如果学习目标涉及相关程序的编写,则需要鼓励学生结合对机器人产品的理解倒推可能的程序代码和算法,并通过反复测试,使产品能够正常运转。
评价与总结环节是指通过对复原产品的评价,激发学生的成就动机,反思在分解与复原过程中遇到的问题。其基本要求包括以下两个方面:其一,评价的重心在于提示学生比较分解前和复原后的产品是否有性能上的变化,如果有变化,则要进一步分析产生的原因,必要时可以借助原先产品的使用视频进行比较分析。其二,如果时间允许,应该鼓励学生形成一个比较完整的产品分解与复原报告,藉此全面梳理操作流程、深入理解产品的构成和工作机制,对涉及的关键知识和常见问题进行梳理总结,并与同学分享学习心得。
解构复原型的核心步骤与前文提到的“拆解-分析-装配”(DAA)过程相似,以“拆分-复原”的方式让学生掌握目标产品的基本构成和实现方法,侧重于基础知识和基本技能的学习,不涉及创新能力的培养,因此该模式可以应用于机器人教育的教学初期,但并不适用于全部教学过程。
2.纠错复原型教学模式
纠错复原型教学模式是指学生在教师的引导下,经历一个对故障机器人进行问题分析和解决以恢复其功能的探究过程。其实施过程包含试用与感知、明确问题与原因分析、方案设计与测试、评价与总结等四个环节。
试用与感知环节除了参考解构复原型教学模式中对应的三点要求外,还有一点需要注意:机器人产品应存在故障(根据教学目标,故障可以涉及机器人结构、传感、控制、动力以及通讯等方面),产品故障可以是自然发生的,也可以是教师人为设计的,其故障難度应与学生的能力相适应,不宜过于容易或复杂。
明确问题与原因分析环节是指通过对故障产品的诊断和分析,培养学生发现问题、分析问题的能力。其基本要求包括以下三个方面:其一,教师应结合学生能力基础调节故障诊断的形式。例如,初学者可以按照“小步子”原则逐步拆分并找到问题根源,而针对具备一定纠错经验和能力的学生则可以鼓励其大胆预测故障的原因和位置,直接进入下一环节。其二,为及时把握学生的纠错进展,教师可以提供半结构化的故障诊断与分析记录表,以书面的方式形成故障诊断与分析记录(如故障产生原因、故障解决方法等)。其三,教学过程中允许学生不断试错,且教师应鼓励学生勇于发现问题,就算是学生提出教学计划之外的故障问题,也应给予合理的反馈。
方案设计与测试环节是指通过对故障产品的正确修复,培养学生的问题解决能力,增强其学习成就感。其基本要求包括以下三个方面:其一,学生需结合故障诊断与分析记录表提出修复意见,若为机器人硬件方面问题,则需提供修正故障所需要的元部件和修复草图;若为机器人软件方面问题,则需设计程序流程图。其二,在测试过程中,要做好观察和记录,继续填写上文提到的故障诊断与分析记录表(含纠错方案、误差分析、修复成功时间等)。其三,如果学习目标涉及对相关程序的纠错,教师则应结合学生能力基础调节程序纠错的形式。例如,初学者可以参考教师下发的源程序逐步分析和纠错,而具备一定纠错经验和能力的学生则可以通过对机器人产品的理解来倒推程序代码和算法,并通过反复测试使产品能够正常运转。
评价与总结环节与解构复原型教学模式中的高度一致,不再赘述。
国内外有关纠错任务教学的研究主要针对物理教育和工程教育领域,机器人教育中的纠错复原型教学模式研究相对欠缺。笔者曾在一项教学实验研究项目中以小学五年级机器人课程“探测巡线走”为例,尝试了这一教学模式(康斯雅等,2019)。在该项目中,首先由教师讲解巡线程序的编写原理,之后发给学生存在故障的巡线程序。为找出其中存在的问题,学生需要对故障代码进行结构拆分,并分析和记录相关指令及功能,再结合巡线原理识别故障指令中存在的错误,进而根据故障诊断表对程序代码进行迭代修改和测试,最后再由教师讲解正确代码的结构和功能,并对学生的表现进行总结。
纠错复原型教学模式将机器人理论知识应用于实际问题的解决,为提高学生的问题解决能力提供了新的途径。其以“纠错-复原”的方式让学生掌握目标作品的工作机制和实现方法,强调学生在掌握基础知识与基本技能的前提下学会应用(如分析故障原因和解决故障问题),但并不涉及创新能力的培养,因而适用于“双基”的巩固与强化阶段。
3.要素增减型教学模式
要素增减型教学模式是指学生在教师的引导下,经历一个对机器人产品分解与“微创新”的探究过程,其实施过程包含试用与感知、分解与观察、要素增减与测试、评价与总结等四个环节。
试用与感知、分解与观察这两个环节与解构复原型教学模式中的高度一致,不再赘述。
要素增减与测试环节是指通过对产品基本要素的增加或减少实现“微创新”,改变产品的部分性能,以培养学生的求异思维。其基本要求包括以下三个方面:其一,要素增减需在原有产品的基础上进行,既可以结合实际需要做硬件方面的改造,也可以在程序设计方面找不足。其二,为方便指导学生的操作,教师可提供半结构化的表格帮助学生设计要素增减方案。要素增减不是漫无目的地胡乱修改,首先需要选择方便修改的零部件或程序代码,其次需要说明每一项修改的原因或理由,并结合测试结果予以补充论证。其三,在动手改造之前,要先提供并描述硬件修改草图及程序流程图。
评价与总结环节是指通过对重构产品的评价,激发学生的成就动机,反思在分解与重构过程中遇到的问题。其基本要求包括以下两个方面:其一,评价的重心在于提示学生分析重构产品的功能与性能、技术与实现、创意与个性(李婷婷等,2017),如果以上几方面与原先产品相比均没有变化甚至导致产品无法正常运转,则要进一步分析重构失败的原因。其二,学生可以通过产品展示的方式分享产品重构意图和实现过程,从优点和不足两个方面比较重构前后产品的差异。
要素增减型教学模式以“分解-要素增减”的方式开拓学生思维,侧重于促使学生掌握“双基”和培养学生的实际应用能力,进而超越机器人产品的原始设计,开展较为基础的“微创新”,适用于培养学生创新能力的初级阶段。
4.结构创新型教学模式
结构创新型教学模式是指学生在教师的引导下,经历一个对机器人产品分解与结构再造的探究过程,其实施过程包含试用与感知、分解与观察、结构再造与测试、评价与总结等四个环节。
试用与感知、分解与观察、评价与总结这三个环节与要素增减型教学模式中的高度一致,不再赘述。
结构再造与测试环节是指从实际需求出发,分析已有产品的不足或发现其新的用途,并对机器人产品进行“再设计”,改变产品要素之间的关系和结构,从而改变产品的功能、性能或外形等特性,以培养学生的创新思维和问题解决能力。其基本要求包括以下三个方面:其一,教师要特别启发学生思考哪些因素对产品性能或外形具有决定性影响,使学生明白抓住核心要素进行结构改造是事半功倍的基本策略。其二,要形成一个比较完整的再设计方案,画出草图和流程图,说明每一项修改的原因或理由,并结合测试结果加以论证,突出创新性。其三,结构再造对学生的要求较高,教师应在方案的可行性、合理性等方面提出建设性指导意见,鼓励学生形成产品迭代意识,逐步完善产品。
目前,针对机器人教育中结构创新型教学模式的探索还较为欠缺,以下关于电动牙刷改造的案例有助于对该种教学模式的理解。在该案例中,学生以小组为单位对如图4所示的电动牙刷进行实物解构。在了解各部分的组成形式与功能之后,学生通过头脑风暴和小组讨论等形式对电动牙刷的再设计提出想法并绘制草图。此处的“再设计”与“要素增减”不同,更侧重于完善产品的外形与功能,比如图5所示的对电动牙刷刷头、手柄、组装方式的优化设计等(Toh et al.,2012;2013)。由此可见,结构创新型教学模式的教学目标不再局限于掌握工程知识,而更注重以产品的实际需求为导向解决真实问题。
毋庸置疑,对学生创新能力的培养是一个非常重要的教育目标,但当前的机器人教育在创新能力培养方面依旧存在诸多障碍(钟柏昌等,2015)。而结构创新型教学模式为学生创新能力的培养提了一种可选择的方案。与前三种模式相比,它更侧重于以“分解-结构再造”的方式促进学生实现知识应用和创新实践,更适用于培养学生创新能力的中后阶段。
五、总结
本文面向中小学机器人教育的实际需要,从不同教学目标定位出发,构建了四种逆向工程教学模式。解构复原型教学模式注重培养学生的基础知识和基本技能,需要学生经历一个从对机器人产品的分解到复原的探究过程,适用于机器人教育的教学初期。纠错复原型教学模式强调学生在掌握“双基”的前提下学会应用,即具备分析故障原因和解决故障问题的能力,但不涉及创新能力的培养,适用于“双基”的巩固与强化阶段。要素增减型教学模式需要学生经历一个从对机器人产品的分解到“微创新”的探究过程,注重学生对“双基”的掌握及应用,强调让学生超越机器人产品的原始设计,开展较为基础的“微创新”,适用于培养学生创新能力的初级阶段。结构创新型教学模式需要学生经历一个从对机器人产品的分解到結构再造的探究过程,与前三种模式相比,其更侧重于知识应用与创新实践,适用于培养学生创新能力的中后阶段。需强调的是,无论哪一种逆向工程教学模式,都需要从现成的产品出发,引导学生代入原产品设计者的身份意识,换位思考和揣摩原设计者的意图,从而快速进入产品复原、改造或纠错的状态。从这个意义上说,上述四种教学模式都具有“造物”的特征,这与创客教育的初衷高度契合(钟柏昌,2016c),因此,其也可用于创客教育。
笔者一直强调要从一个或多个机器人产品出发开展基于逆向工程法的机器人教学,但正如前文所言,这种产品至少可以分为两种类型,一种是市场上销售的机器人产品,另一种是师生利用机器人套件自行设计和制作的作品。这种分类会导致不同的教学处理。例如,如果以购买的机器人产品作为逆向工程教学的起点,则通常不适合让学生直接对其进行要素增减或结构改造,否则容易因为损坏产品而导致高昂的教学成本。因此,如果采用此类产品作为学习对象,往往只能停留于分解与复原阶段。而在重新改造阶段,则需要采用仿造的方式,即利用学校现有的机器人套件,尝试自己动手制作机器人作品以再现相似的产品功能和结构。即便如此,采购成熟的机器人产品所需的投入依然较高,因而那些经济实用且非高端的智能玩具应该作为首选。此外,还可能出现因购买的机器人产品功能丰富而致使仿造无法在短时间内完成的情况,此时的逆向工程教学就需要分步进行,以由易到难、由简到繁、由少到多、由复原到重构的方式循序渐进地展开。因此,针对一种产品的逆向工程教学就有可能是为期一个学期或一个学年的学习项目,这不仅有利于学生的深度学习,也有利于减少经费投入。
如果采用的是由机器人套件制作的作品,则可以直接在其上进行程序设计或要素结构的再设计。然而,如果采用教师自行制作的作品作为逆向工程教学的起点,在面对大班教学和多个班级轮流上课时,教师将难以应付大工作量的作品准备。此时,将前一个班级学习结束后的作品作为下一个班级逆向工程教学的起点则是一种更为合理的选择。
对于一线教师而言,还需要注意四种教学模式的选用策略问题。正如前文提到的,四种教学模式体现的是一种循序渐进地提升学生实践创新能力的思想,因此,依据学生所处的学习阶段和学习基础,设计循序渐进、由简到繁的项目主题,并从四种教学模式中选择相适应的模式开展教学是一种基本策略。此外,还有另一种“打散重组”的策略,即针对同一个项目主题,先后采用不同的教学模式,并不断扩展项目任务,提升作品设计的创新程度和复杂程度。例如,可以从产品的解构复原开始,进而围绕该产品进行要素增减或结构创新。无论采用何种教学模式,都需切记逆向工程本身是一个复杂的过程,在教学应用时并不一定能做到明确的环节划分,因而需要根据实际情况灵活调整和组合。
需要特别说明的是,本文面向中小学机器人教育所构建的逆向工程教学模式,并非是对工业领域逆向工程方法的简单照搬。作为一种成熟的工程设计与生产方法,逆向工程有着非常高的技术要求。例如,工业领域往往会借助CAD软件来做再设计,利用虚拟仿真系统来做仿真测试,并利用精密仪器来做测量等等。但在基础教育领域,无论是学生的知识基础还是学校的教学条件,均无法与之看齐。因此,逆向工程方法在中小学教育中的应用,应当侧重于借鉴其基本思想和方法,并采用一些相对低端的技术工具和手段(如3D打印、激光切割等)进行要素或结构的改造。在作品的精度、稳定性等质量指标上的要求也相对较低,甚至可以称得上粗糙,这都是正常的现象,在实践中切忌过分拔高对作品质量的要求。
参考文献:
[1]韩凤霞(2015). 基于逆向工程的开放实验教学研究[J]. 科技资讯,(21):136-137.
[2]黄诚驹(2004). 逆向工程综合技能实训教程[M]. 北京:高等教育出版社:8.
[3]康斯雅,钟柏昌(2019). 纠错复原型机器人教学案例研究[J]. 数字教育,(1):37-41.
[4]李婷婷,钟柏昌(2017). 中小学机器人教育的核心理论研究——论实验模拟型教学模式[J].电化教育研究,(9):96-101.
[5]滕水生(2016). 基于逆向工程思维的模型制作实践教学改革探索[J]. 设计,(14):112-113.
[6]滕志霞,陆光,刘欣(2015). 基于逆向工程法的软件工程教学模式改革与实践[J]. 计算机教育,(20):32-34,38.
[7]吳兰岸,刘延申(2016). 基于逆向工程的工程课程开放式教学[J]. 高等工程教育研究,(6):185-189.
[8]闫妮,钟柏昌(2018). 中小学机器人教育的核心理论研究——论发明创造型教学模式[J]. 电化教育研究,(4):66-72.
[9]钟柏昌(2016a). 中小学机器人教育的核心理论研究——机器人教学模式的新分类[J]. 电化教育研究,(12):87-92.
[10]钟柏昌(2016b). 中小学机器人教育的困境与突围[J]. 人民教育,(12):52-55.
[11]钟柏昌(2016c). 谈创客教育的背景、本质、形式与支持系统[J]. 现代教育技术,(6):13-19.
[12]钟柏昌(2018). 微创新与跨学科是怎样“炼”成的[N]. 中国教育报,2018-09-29(3).
[13]钟柏昌,张禄(2015). 我国中小学机器人教育的现状调查与分析[J]. 中国电化教育,(7):101-107.
[14]钟柏昌,王艳霞(2018). 配对学习模式在机器人教育中的有效性[J]. 现代远程教育研究,(3):68-74.
[15]周灿(2016). 用逆向工程的思路进行Inventor软件教学[J]. 职业,(17):91.
[16]祖文明(2011). 逆向工程技术的应用及国内外研究的现状及发展趋势[J]. 价值工程,(21):30-31.
[17]Barr, R. E., Schmidt, P. S., & Krueger, T. J. et al.(2000). An Introduction to Engineering Through an Integrated Reverse Engineering and Design Graphics Project[J]. Journal of Engineering Education, 89(4):413-418.
[18]Board, K. (2012). Teach CAD and Measuring Skills Through Reverse Engineering[J]. Tech Directions, 72(1):13-15.
[19]Hess, H. L. (2000). Teaching Manufacturing Using the Golden Key-Reverse Engineering[EB/OL]. [2018-03-10].https://peer.asee.org/8751.
[20]Hess, H. L. (2002). Solid Modeling and Reverse Engineering: The Stimulus for Teaching Manufacturing[EB/OL]. [2018-03-12].https://peer.asee.org/10347.
[21]Huang, K. (2011). Enhancing Design Education by Product Reverse Engineering[J]. Proceedings of the Canadian Engineering Education Association, (27):553-557.
[22]Kremer, G., & Ogot, M. (2006). Developing a Framework for Disassemble/Assemble/Analyze (DAA) Activities in Engineering Education[EB/OL]. [2018-03-10].https://peer.asee.org/1103.
[23]Lee, R. S., Tsai, J. P., & Kao, Y. C. et al. (2003). STEP-Based Product Modeling System for Remote Collaborative Reverse Engineering[J]. Robotics and Computer-Integrated Manufacturing, 19(6):543-553.
[24]Ogot, M. (2002). The Creative Design Workshop: Learning and Discovery Through Reverse Engineering[EB/OL]. [2019-03-10].https://peer.asee.org/10522.
[25] Otto, K. N., & Wood, K. L. (1998). Product Evolution: A Reverse Engineering and Redesign Methodology[J]. Research in Engineering Design, 10(4):226-243.
[26]Shooter, S. (2008). Reverse Engineering to Design Forward: An Introduction to Engineering Experiential Learning Module with Video Podcasts[EB/OL]. [2018-03-12].https://peer.asee.org/3716.
[27]Toh, C. A., Miller, S. R., & Kremer, G. E. O. (2012). The Impact of Product Dissection Activities on the Novelty of Design Outcomes[C]// Proceedings of the ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. Illinois: American Society of Mechanical Engineers:615-624.
[28]Toh, C., Miller, S., & Kremer, G. E. O. (2013). The Role of Personality and Team-Based Product Dissection on Fixation Effects[J]. Advances in Engineering Education, 3(4):1-23.
[29]West, T., Feuerstein, A., & Shooter, S. (2008). Using Cyber-Infrastructure Enhanced Product Dissection to Introduce Engineering to Middle School Students[EB/OL]. [2018-04-05].https://peer.asee.org/3385.
[30]Wood, K. L., Jensen, D., & Bezdek, J. et al. (2001). Reverse Engineering and Redesign: Courses to Incrementally and Systematically Teach Design[J]. Journal of Engineering Education, 90(3):363-374.
[31]Zhong, B., & Li, T. (2019). Can Pair Learning Improve Students Troubleshooting Performance in Robotics Education?[J]. Journal of Educational Computing Research, DOI: 10.1177/0735633119829191.
[32]Zhong, B., Wang, Q., & Chen, J. et al. (2016). An Exploration of Three-Dimensional Integrated Assessment for Computational Thinking[J]. Journal of Educational Computing Research, 53(4):562-590.
Construction of Reverse Engineering Teaching Model in Robotics Education
KANG Siya, ZHONG Baichang
Abstract: Reverse engineering (RE) has wide application prospects in the teaching of engineering courses as a process of product optimization and re-creation through reverse analysis and research on target products. Robotics education is a new field of education that traditional teaching methods are difficult to give full play to their educational value, while the RE method shows obvious advantages and applicability for robotics education. In order to deal with the single-dimension of teaching model of RE in robotics education, four kinds of RE teaching models from two dimensions of restoration experiment and reconstruction experiment: Deconstruction Recovery Model, Troubleshooting Model, Element Minitrim Model, and Structural Innovation Model were constructed in the study. Then the “lantern model” was built to visualize the aspects of these four teaching models. Among them, the Deconstruction Recovery Model focuses on the “dissection-recovery” method to let students grasp the basic composition and implementation methods of target products; The Troubleshooting Model focuses on the “troubleshooting-recovery” method to let students master the working mechanism and implementation method of target products; The Element Minitrim Model focuses on developing students thinking in the form of “dissection-element minitrim”; The Structural Innovation Model focuses on promoting students knowledge application and innovative practice in the form of “dissection-structural reconstruction”. In conclusion, the aforementioned teaching models address that students should have the identity consciousness of original product designer. Furthermore, these teaching models all have the characteristics of “creation”, and should be flexibly used and recomposed according to the actual situation.
Keywords: Reverse Engineering; Robotics Education; Teaching Model; Deconstruction Recovery Model; Troubleshooting Model; Element Minitrim Model; Structural Innovation Model
