船舶在锚地操纵碰撞案例分析
申荣
摘要:本文分析了一桩船舶在锚地操纵不当而发生碰撞事故的原因,提出了在港口复杂水域船舶应采取的戒备措施,包括必要的风险评估、应急预案和驾驶台资源管理。
关键词:船舶 锚地操纵 碰撞
某年12月4日,S轮在厦门No.2锚地候泊,在进港起锚调头操作时,为避让小渔船与锚泊船Q轮发生碰撞,造成Q轮No.7货舱右舷船壳凹陷。S轮球鼻艏轻微擦损,所幸无人员伤亡和油污事故发生。
一、船舶概况
(一)S轮
全集装箱船,共5个货舱;总长170.02米,型宽28.48米,型深15.46米;总吨19 915吨,净吨9 263吨;1982年建造,该轮为内贸南北线班轮。12月4日,S轮548S航次从天津驶抵厦门港,载箱921TEU/20 070吨;抵港吃水:首10.30米,尾10.8米。
(二)被撞船
被撞船为Q轮,1986由前苏联建造的大灵便型散装货轮,总长251.39米,型宽31.8米,型深16.95米;总吨31 698吨,净吨17 750吨,载重吨为52 450吨,碰撞当时该轮满载
52 000吨煤在厦门No.2锚地侯泊,碰撞造成该轮No.7舱右侧船壳凹陷。
二、气象和潮汐情况
根据S轮航海日志记载,当时天气为云天,东北风6级,中浪,能见度7,高潮末,西北流,较缓。
三、事故经过
S轮第548S航次,载货921TEU/20 070吨;吃水:首10.30米,尾10.8米。上一港为天津,于某年12月初1118时抵厦门No.2锚地,左锚5节入水,当时No.2锚地内只有Q轮一艘船,S轮锚泊后,Q轮位于S轮的TB302度/D1.0海里的位置。
S计划12月4日2000时上厦门港引航员靠泊。
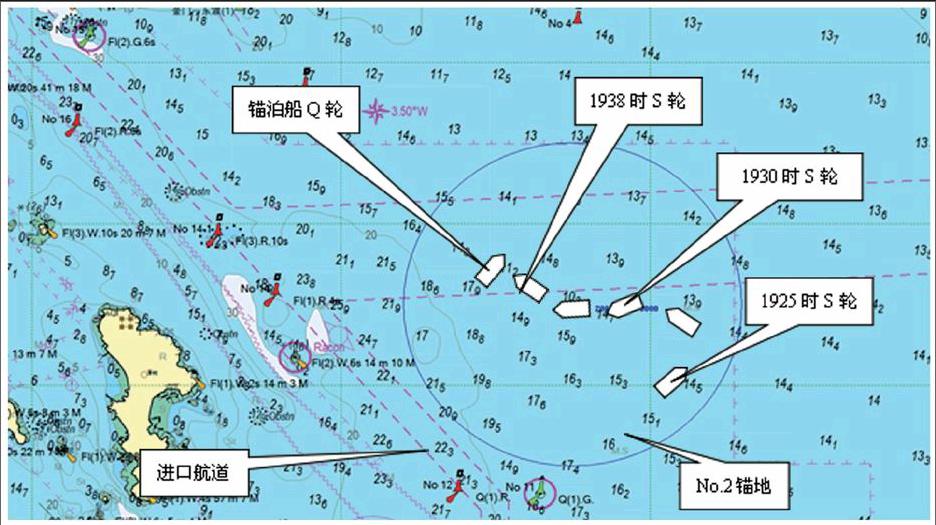
19:10,开始起锚,此时艏向为东北向,正好背对进口航道。
19:25,锚离底。19:30,掉头完,准备进入航道,此时S轮主机港速前进二,速度5~6节,正在S轮进入航道的时候,在其船首左舷10~15度,距离100~150米的位置,突然有一小船亮起灯,船长急拉汽笛,但小船没有避让,继续朝S轮船首方向移动,船长即大舵角向右避让。
19:34,让清小船后,S轮发现船首正对着锚泊船Q轮,船长即令主机停车、倒车,抛下双锚,左锚3节,右锚1.5节,以期把船停住,但由于S轮是满载,巨大的惯性,使S轮不断地向Q轮逼近。
19:38,S轮以1~1.5节的速度直角撞向Q轮No.7舱右舷。
碰撞发生后,S轮即向厦门交管中心报告并与对方船交换船舶信息和彼此损坏情况,由于是晚上且被碰位置位于水线以下,双方都无法确认损坏情况,在确认双方无人员伤亡和油污事故后,经厦门交管同意于20:00起锚续航。
20:29,上厦门港引航员。
21:45,S轮靠妥厦门海天No.11泊。
四、损失情况
(一)S轮球鼻艏前端轻微凹陷,首尖舱内部球鼻艏部位有油漆脱落,CCS船检确认不影响船体强度,允许下次年检时修理。
(二)根据潜水探摸公司的报告,Q轮的损坏情况是:
1.凹陷变形区域位于右侧船壳No.152-No.160肋位处(肋间距约90厘米),垂向自毗龙骨以上2米处向上至11米水线位置。
2.在水线6米,No.157-154肋位处为凹陷变形最深区域,向内凹陷约50厘米。
(三)两船都无货损,无人员伤害,未产生污染。
五、事故原因分析
S轮碰撞前后的纪录较完整和正确,本次事故的经过比较简单,通过调查获得的证据,分析如下:
(一)对当地和当时环境不熟悉,以及操作当时没有对通航环境进行仔细观察和评估是造成本次事故的主要原因
1.港口背景亮光的影响
根据船长的报告和询问时的描述,船舶起锚掉头完毕后,船长突然发现位于左舷15度,近距离有小船灯亮,原因是小船原来没有点灯,而当时海面风浪较大,小船在雷达中的回波被海浪淹没;同时,虽然当时视线良好,但受厦门港背景灯光的影响,没提前看到该小船,仓促避让,致使事故发生。
2.对当地和当时环境不熟悉
看似因避让小船操纵不当造成的事故,实则是船长对当地和当时环境不熟悉造成,据了解每年12月至次年3月是厦门海域捕鳗苗的旺季,厦门港水域除航道外到处都是鳗苗网和捕鳗苗的小船,而且晚上一般不点灯,只有在有危险或威胁到其网具时才突然点灯。据被碰船Q轮(厦门当地船)船长称:正因为他对该水域相当熟悉,所以在这个季节他每次在进出锚地和抛起锚作业时都采取极其谨慎和缓慢的操作,不敢有任何疏忽。而由于S轮船长没有意识到锚地周围的鳗苗网和不点灯捕鳗苗船的存在,所以没有对当时所处的特殊环境保持应有的警觉,也没有在起锚和掉头作业前对周围的环境进行仔细观察和评估,因此在船舶掉头完毕后,突然发现小船已成紧迫危险局面,而仓促右转避让时,根本没有考虑Q轮所锚泊的位置由于本船的右转业已形成非常危险的紧迫局面,这是没有周密计划,没有预案所造成的,是事故链中的主要一环。
(二)起锚掉头操作时速度过快是本次事故的直接原因
根据船长的报告和现场调查,S轮19:25锚离底,19:30已完成近180度的掉头(转向速率如此之快,平均每分钟36度),而此时的速度仍高达6节,致使在19:30发现小船时已无法在安全的距离内把船停住而不得不右转避让,同样是由于速度过快,致使在发现与Q轮有碰撞危险时,即使采取了抛双锚和全速倒车的应急措施,也没能把船停住,最终以约1.5节的速度直角撞向Q轮。在如此复杂的水域和环境中,采取如此快的车速掉头,本身就隐藏着盲目、冒险的草率行为。
(三)团队协作不良是本次事故的重要原因
S轮在掉头操作过程中,真正在瞭望的人只有船长一个人,三副说他正忙于操纵车钟,大副说他正在收锚,所以船长一个人既要忙于操纵船舶又要兼顾瞭望,难免在瞭望上会有疏漏,而在此次事故中两个负有主要瞭望责任的驾驶员都没有进行瞭望,不能不说是团队协作的失败,协作失败的原因并非简单地归纳为当事人的不负责任,而是团队管理、资源管理存在问题,没有把最主要的航行“瞭望”放在首位。
六、结束语
这是一起锚掉头作业过程中,因复杂环境和操作不当而引起的单方责任碰撞事故。事故过程简单,但教训深刻。在船舶密集区域移动船舶,属于临界操作,驾驶人员特别是船长应加强风险意识。在作业前应根据船舶操纵性能与实际情况,对周围的通航环境和其他锚泊船以及当时气象与潮汐潮流以及其他可能影响船舶操纵的资料进行充分的了解和风险评估,制定详细的操作方案(并备有两个以上备用方案),以提高船舶操纵预警、预防、预控的能力。安全速度和保持正规瞭望是任何时候保证船舶航行安全必须遵循的最低原则。应充分发挥团队作用,作业前应让每一位参加作业的成员了解操作环境和意图,并要求每位团队成员按职责要求(如:协助瞭望,提醒船长等),协助船长安全地完成整个操纵。
摘要:本文分析了一桩船舶在锚地操纵不当而发生碰撞事故的原因,提出了在港口复杂水域船舶应采取的戒备措施,包括必要的风险评估、应急预案和驾驶台资源管理。
关键词:船舶 锚地操纵 碰撞
某年12月4日,S轮在厦门No.2锚地候泊,在进港起锚调头操作时,为避让小渔船与锚泊船Q轮发生碰撞,造成Q轮No.7货舱右舷船壳凹陷。S轮球鼻艏轻微擦损,所幸无人员伤亡和油污事故发生。
一、船舶概况
(一)S轮
全集装箱船,共5个货舱;总长170.02米,型宽28.48米,型深15.46米;总吨19 915吨,净吨9 263吨;1982年建造,该轮为内贸南北线班轮。12月4日,S轮548S航次从天津驶抵厦门港,载箱921TEU/20 070吨;抵港吃水:首10.30米,尾10.8米。
(二)被撞船
被撞船为Q轮,1986由前苏联建造的大灵便型散装货轮,总长251.39米,型宽31.8米,型深16.95米;总吨31 698吨,净吨17 750吨,载重吨为52 450吨,碰撞当时该轮满载
52 000吨煤在厦门No.2锚地侯泊,碰撞造成该轮No.7舱右侧船壳凹陷。
二、气象和潮汐情况
根据S轮航海日志记载,当时天气为云天,东北风6级,中浪,能见度7,高潮末,西北流,较缓。
三、事故经过
S轮第548S航次,载货921TEU/20 070吨;吃水:首10.30米,尾10.8米。上一港为天津,于某年12月初1118时抵厦门No.2锚地,左锚5节入水,当时No.2锚地内只有Q轮一艘船,S轮锚泊后,Q轮位于S轮的TB302度/D1.0海里的位置。
S计划12月4日2000时上厦门港引航员靠泊。
19:10,开始起锚,此时艏向为东北向,正好背对进口航道。
19:25,锚离底。19:30,掉头完,准备进入航道,此时S轮主机港速前进二,速度5~6节,正在S轮进入航道的时候,在其船首左舷10~15度,距离100~150米的位置,突然有一小船亮起灯,船长急拉汽笛,但小船没有避让,继续朝S轮船首方向移动,船长即大舵角向右避让。
19:34,让清小船后,S轮发现船首正对着锚泊船Q轮,船长即令主机停车、倒车,抛下双锚,左锚3节,右锚1.5节,以期把船停住,但由于S轮是满载,巨大的惯性,使S轮不断地向Q轮逼近。
19:38,S轮以1~1.5节的速度直角撞向Q轮No.7舱右舷。
碰撞发生后,S轮即向厦门交管中心报告并与对方船交换船舶信息和彼此损坏情况,由于是晚上且被碰位置位于水线以下,双方都无法确认损坏情况,在确认双方无人员伤亡和油污事故后,经厦门交管同意于20:00起锚续航。
20:29,上厦门港引航员。
21:45,S轮靠妥厦门海天No.11泊。
四、损失情况
(一)S轮球鼻艏前端轻微凹陷,首尖舱内部球鼻艏部位有油漆脱落,CCS船检确认不影响船体强度,允许下次年检时修理。
(二)根据潜水探摸公司的报告,Q轮的损坏情况是:
1.凹陷变形区域位于右侧船壳No.152-No.160肋位处(肋间距约90厘米),垂向自毗龙骨以上2米处向上至11米水线位置。
2.在水线6米,No.157-154肋位处为凹陷变形最深区域,向内凹陷约50厘米。
(三)两船都无货损,无人员伤害,未产生污染。
五、事故原因分析
S轮碰撞前后的纪录较完整和正确,本次事故的经过比较简单,通过调查获得的证据,分析如下:
(一)对当地和当时环境不熟悉,以及操作当时没有对通航环境进行仔细观察和评估是造成本次事故的主要原因
1.港口背景亮光的影响
根据船长的报告和询问时的描述,船舶起锚掉头完毕后,船长突然发现位于左舷15度,近距离有小船灯亮,原因是小船原来没有点灯,而当时海面风浪较大,小船在雷达中的回波被海浪淹没;同时,虽然当时视线良好,但受厦门港背景灯光的影响,没提前看到该小船,仓促避让,致使事故发生。
2.对当地和当时环境不熟悉
看似因避让小船操纵不当造成的事故,实则是船长对当地和当时环境不熟悉造成,据了解每年12月至次年3月是厦门海域捕鳗苗的旺季,厦门港水域除航道外到处都是鳗苗网和捕鳗苗的小船,而且晚上一般不点灯,只有在有危险或威胁到其网具时才突然点灯。据被碰船Q轮(厦门当地船)船长称:正因为他对该水域相当熟悉,所以在这个季节他每次在进出锚地和抛起锚作业时都采取极其谨慎和缓慢的操作,不敢有任何疏忽。而由于S轮船长没有意识到锚地周围的鳗苗网和不点灯捕鳗苗船的存在,所以没有对当时所处的特殊环境保持应有的警觉,也没有在起锚和掉头作业前对周围的环境进行仔细观察和评估,因此在船舶掉头完毕后,突然发现小船已成紧迫危险局面,而仓促右转避让时,根本没有考虑Q轮所锚泊的位置由于本船的右转业已形成非常危险的紧迫局面,这是没有周密计划,没有预案所造成的,是事故链中的主要一环。
(二)起锚掉头操作时速度过快是本次事故的直接原因
根据船长的报告和现场调查,S轮19:25锚离底,19:30已完成近180度的掉头(转向速率如此之快,平均每分钟36度),而此时的速度仍高达6节,致使在19:30发现小船时已无法在安全的距离内把船停住而不得不右转避让,同样是由于速度过快,致使在发现与Q轮有碰撞危险时,即使采取了抛双锚和全速倒车的应急措施,也没能把船停住,最终以约1.5节的速度直角撞向Q轮。在如此复杂的水域和环境中,采取如此快的车速掉头,本身就隐藏着盲目、冒险的草率行为。
(三)团队协作不良是本次事故的重要原因
S轮在掉头操作过程中,真正在瞭望的人只有船长一个人,三副说他正忙于操纵车钟,大副说他正在收锚,所以船长一个人既要忙于操纵船舶又要兼顾瞭望,难免在瞭望上会有疏漏,而在此次事故中两个负有主要瞭望责任的驾驶员都没有进行瞭望,不能不说是团队协作的失败,协作失败的原因并非简单地归纳为当事人的不负责任,而是团队管理、资源管理存在问题,没有把最主要的航行“瞭望”放在首位。
六、结束语
这是一起锚掉头作业过程中,因复杂环境和操作不当而引起的单方责任碰撞事故。事故过程简单,但教训深刻。在船舶密集区域移动船舶,属于临界操作,驾驶人员特别是船长应加强风险意识。在作业前应根据船舶操纵性能与实际情况,对周围的通航环境和其他锚泊船以及当时气象与潮汐潮流以及其他可能影响船舶操纵的资料进行充分的了解和风险评估,制定详细的操作方案(并备有两个以上备用方案),以提高船舶操纵预警、预防、预控的能力。安全速度和保持正规瞭望是任何时候保证船舶航行安全必须遵循的最低原则。应充分发挥团队作用,作业前应让每一位参加作业的成员了解操作环境和意图,并要求每位团队成员按职责要求(如:协助瞭望,提醒船长等),协助船长安全地完成整个操纵。
