视距内航拍无人机的研究
张壮壮 朱广勇 李田
摘 要:视距内航拍无人机是一种自带动力驱动、无人机上没有驾驶舱和驾驶员、携带拍照摄像设备、执行拍照、摄影、探测和搜救等任务。主要介绍了视距内航拍无人机结构原理和加工制备过程及拍摄应用,以机架为载体,搭载遥感设备、控制系统及数码相机等,从而实现其主要功能,视距内航拍无人机;由于重量轻、携带方便、操控容易等特点,可以一定程度上降低航拍成本费用,具有一定现实实践应用价值。
关键词:无人机;航拍;多旋翼
无人机自2007开始大量进入国内市场之后,民用无人机的运用随之展开,2009—2012的无人机主要以飞控系统为核心,随着技术的发展,到2012—2014无刷云台、WiFi图传,一体机设计凸显其优势;到2015视觉悬停辅助装置,高清成像相机得到了越来越广泛的应用。目前在国内共计有三百余家公司,无人机逐渐拥有环境感知,视觉追随,自动避障,精确视觉悬停辅助系统;然而就目前贵州省内而言,极少出现无人机的身影,更难寻找私人航拍定制业务。结合前期无人机研究基础,研究制作多旋翼视距内航拍无人机。
1 研究内容
视距内航拍无人机采用多旋翼无人机,选型制备着重研究其结构原理和使用情况,运用过程中,寻求最佳视角,进行图像和视频的拍摄高质量的影像资料。主要研究内容包括拟定视距内航拍无人机总体设计方案,并通过资料查询与实践分析,对总体设计方案进行充分论证,根据方案进行视距内无人机的样机试制与性能优化。
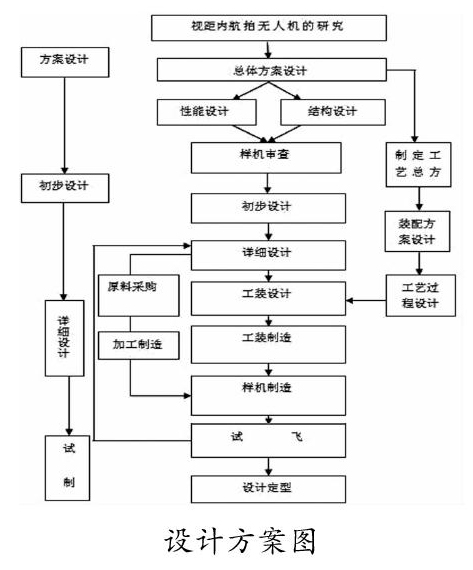
2 方案设计
如下图所示,总体方案设计包括初步设计、详细设计和样机试制过程,初步设计包括无人机类型确定,旋翼数量为六的方案较佳,六翼无人机应用范围广泛,具备飞行时间长,清晰度高,数据更新快等优点,然后通过详细设计选定工艺方案,制作完整样机,在样机试飞过程中对样机进行完善与优化,最终实现定型。
3 主要构件
3.1 机械机构
3.1.1 机架
所谓“机架”,指的就是整个多旋翼无人机的承载平台,为匹配方案设计六翼无人机,机架采用六轴飞行器的形式,机架的组成主要由中心板、力臂、脚架组成,总体结构简单紧凑,质量轻便,能够很好地承载飞行所需电池、机翼、云台及相机等设备,保障无人机整体提升力,使无人机在飞行过程中保持平稳的姿态和位置,总体灵巧轻便,在满足功能的前提下有足够飞行时间。
3.1.2 云台
为了实现无人机的拍摄功能,在机架支撑的基础上,就需要把相机、摄像机带到空中,但各部分不可避免都会受重力作用,同时无人机在高速飞行中和悬停的时候还会受到不同程度的风力作用。因此,无人机在飞行过程中,机身会不可避免的晃动或震动,一定程度上就会影响到拍摄质量,这时就需要航拍云台了。设计中为了更好发挥无人机性能,采用基石的三轴免调云台,该云台携带有位姿传感器,在飞行过程及时反馈机身的位置和姿态,当机身的位置和姿态发生偏移时,控制中心传感器反馈的信息,使电机运动提供额外动力,对机身和相机进行运动补偿和调整,使相机位置相对稳定,消除机身晃动或者震动的影响,保证拍摄图片与视频的清晰度。另一方面,由于基石云台是开源产品,所以后期使用过程中,根据使用需求,结合运台结构,可以调整或添加处理命令,适当补充设备固件,在拍摄过程中便可以可以增加兴趣点或者其他热感应搜寻功能等。
3.1.3 旋翼
旋翼是在无人机动力作用下直接产生推力的部件,它的形状性能很大程度上決定了无人机飞行性能和续航时间。旋翼采用9*4.7E的玻纤浆,玻纤浆的材质坚韧,抗张能力强,密度小、不导电、耐高温、性能稳定,是一种优质的旋翼材料。选用时,充分考虑与电机、电调搭配,可以将动力发挥到最大限度,在相同的推力下节省电量耗损,这样就能延长无人机的续航时间。
3.2 控制系统
3.2.1 自动驾驶系统
为匹配六旋翼无人机,自动驾驶系统采用的是大疆NAZA自动驾驶系统,内部主要包括主控器、多功能模块(VU)、GPS指南针等;其主要功能是要找无人机的拍摄要求,实现对无人机起停和飞行控制,能在各种工作情况下保持机体的稳定性和安全性,减轻地面操纵人员的劳动程度。同时导航设备匹配GPS指南针,用于识别无人机在整个飞行和拍摄过程重大方向及其位置,能够有效完成预定的航线和拍摄任务。
采用大疆NAZA自动驾驶系统能够为低高度六翼飞行器在狭小的空间内提供卓越的飞行特性。可以在GPS姿态模式、气压定高增稳模式和手动模式三种模式下进行调换。在GPS信号良好的情况下;主要使用GPS姿态模式,此模式可以保持机身稳定,充分保证无人机功能,使无人机在飞行与拍摄过程中不会晃动,保证拍摄画面的清晰度。当在一些特定情况下,比如有磁场干扰、GPS信号弱或者消失时,可以采用气压定高增稳模式,该模式可以消除信号干扰,在空中飞行过程中产生颠簸与振动,实现无人机功能最优化。当无人机执行完拍摄任务时,为方便“驾驶员”的下操作与控制,可以转换到手动模式使无人机飞回。
3.2.2 飞行控制器
飞行控制器采用天地飞ET12,其主要结构包括遥控器挂绳、接收机、遥控器双回中组件、外部电压检测组件。整机拨柄开关一共有6个三段、2个两段开关,2个旋钮,2个拨杆,1个回中拨轮,1个脉冲拨轮,6个微调开关。内部线路结构简洁,维护方便,集成度很高,重量轻。具有Fn键的设计,实际可用的微调开关有8,通过Fn的切换,可以把右侧的五向摇杆切换成通道开关来用。
ET12背部集成了USB数据孔、耳机孔、模拟器插孔。侧部、背部4块软胶可拆,拆掉背部2块后可以进行摇杆弹力调整。电池仓长约95外侧宽约35mm.内部有效宽度:26mm外侧深度越58mm有效深度约45mm。
ET12已经内置了诸如三角翼混控,副翼到方向舵,副翼差动,副翼/襟翼刹车,蛇滚等已经预先编辑好的函数,需要用的时候调整参数就好了。功能菜单主要分为4级:系统设置、通信设置、通用功能、模型功能,完全能够满足视距内航拍无人机的使用需求。
3.2.3 显示器
相机我们采用飞荧6S4K运动相机,飞萤6S在第一代5S的基础上,增加了对4K视频拍摄的支持,并且还有更多的配件可供选择。主要配件包括支架转接头,USB数据线,防水外壳套件,镜头盖,3M泡沫双面贴等。
飞萤6S采用联咏96660方案以及SONY 1600万像素背照式CMOS,配置F/2.87玻镜片、水平120°、对角170°广角镜头,能够拍摄最高4K@24fps的视频和4608*3456分辨率的照片;拍摄的视频格式为MP4格式,拍摄的照片格式JPG格式;可携带最大64GB Micro SD高速卡,容量足够。
飞萤6S外形尺寸59*21*41mm,并且采用数据线接口设计,数据线接口有USB 2.0、HDMI、AV三种格式,能够兼容多种类型的云台。其电池容量为3.7V;1680mAh;6.2Wh。由于运动相机安装在无人机平台上,所以重量不能太大。而飞萤6S的机身重量仅有74.6g。很大程度上减轻了无人机的整体负重量。匹配7寸高清屏显示器,集接受、显示于一体,使用过程中支持可查找频率。在实际飞行测试中,经过不同分辨率的试验,当将相机的分辨率设置为1080p,整机能够支持60多分钟的连续视频录制,续航能够满足拍摄功能的要求。
4 结论
介绍了六翼巡航飞行器的设计方案,并相应进行了各部分的结构设计与选用配置,对其中的各构成模块及相关的技术理论作了一定的介绍。
空机重量为1390g加上电池和摄像头为2218g外加机架为2428g,机身直径为550mm,外加旋翼直径为770mm,高度不加机架为15cm,含机架高达34cm,整体外观为黑色。
飞机用锂聚合电池供电,续航时间长,可充电反复利用。通过试验、计算寻找滞空时间最长的动力搭配,搭载1000mA的电池,最大载重量4.5kg情况下,可飞行40分钟。
为了飞行稳定,消除大自然天然磁场和无人机本身内部电磁波对GPS信号的干扰,做了抗电子干扰处理,系统采用特制的吸波纸贴合在无人机的排线,线路板,电池等部位,有效内容防止电磁干扰。通过飞行试验,该视距内航拍无人机能够满足各类生活拍摄任务需要。通过视距内无人机的研究使用,可使得婚庆、个人航拍影集等私人订制服务得已展开。同时航拍无人机是小型区域范围观察、巡检、巡逻、摄影的重要设备,通过无人机航拍业务的展开,为普通大众提供便捷的私人定制的创意航空摄影业务,同时可以为矿山、工地、农田提供巡检服务。
参考文献:
[1]王明浩,朱锐.无人机摄影技术商业实践研究[J].中外企业家,2020(08):108-109.
[2]李正農,胡昊辉,沈义俊.六旋翼无人机旋翼转动对测风准确性的影响研究[J].实验流体力学,2019,33(06):7-14.
[3]徐瑞发.浅析无人机航拍的媒体应用价值[J].视听界,2019(06):119-121.
[4]孟佳男,陈浪,贾建峰,袁吉安,李卓,杨伟新.低空航拍无人机[J].甘肃科技,2014,30(11):60-63.
基金项目:六盘水师范学院大学生创新训练项目(编号:201510977002);贵州矿山装备数字化技术工程研究中心(黔教合KY子[2017]026号);机械装备应用与研发科技创新团队“LPSSYKJTD201802”机械工程专业综合试点改革项目“LPSSYzyzhggsd201802”;机械工程重点培育学科“LPSSYZDPYXK201705”
*通讯作者:朱广勇。
