桥梁主梁端部翼板颤振主动控制流固耦合计算
詹昊 廖海黎
摘要: 安装主动控制翼板是提高大跨度桥梁颤振稳定性的一种有效方法。运用流固耦合技术对桥梁颤振主动控制进行计算分析,可以考虑气动翼板的大幅度扭转以及气动翼板和主梁端部的气动干扰效应。通过对商用软件FLUENT二次开发,建立了竖弯和扭转流固耦合数值仿真计算模型,并对主梁端部安装了主动控制翼板的大海带桥的颤振稳定性进行了数值仿真计算分析。系统地研究了前后翼板相对于主梁的角速度对颤振性能的影响。数值仿真计算结果表明:没有采用主动控制翼板时,颤振临界风速计算值和风洞实验值吻合良好。采用主动控制翼板后,当前翼板角速度与主梁反向,后翼板角速度与主梁同向时控制效果良好。且随着气动翼板角速度增大,主梁扭转位移减小。旋涡脱落图表明:作用在翼板的流场和作用在主梁的流场相互干扰,因此作用在整个系统上的力矩变化不仅来源于气动翼板的力矩,而且来源于流场形态的改变。计算表明在上述良好的控制时,气动翼板提供反向力矩,且与作用在主梁上的力矩相位相反,最大限度地平衡了作用在主梁上的力矩,使作用在主梁系统上的力矩均值减小,这是主动控制翼板提高桥梁颤振稳定性的原因之一。最后研究了气动翼板合适长度,计算表明:当气动翼板长度为主梁宽度的10%~15%时,颤振主动控制效果较好。
关键词: 桥梁工程; 流固耦合; 颤振临界风速; 颤振主动控制; 主梁端部翼板
中图分类号: U441+.3文献标志码: A文章编号: 1004-4523(2018)02-0276-07
DOI:10.16385/j.cnki.issn.1004-4523.2018.02.010
引言
颤振通常是一种具有发散性质的自激振动,会对桥梁结构造成灾难性破坏。安装主动控制翼板是提高桥梁颤振稳定性的有效方法。自1992年Ostenfeld和Larsen提出利用主动控制翼板抑制桥梁颤振的概念以来[1],关于主动控制翼板的实验与理论研究正逐渐引起桥梁工程界的关注。1992年Kobayashi 和Nagaoka 发表了第一篇关于桥梁主动控制的文章,通过节段模型风洞试验表明主动控制翼板能将颤振临界风速提高一倍[2]。1999年Wilde 和 Fujino通过理论分析和风洞试验得出运用主动控制翼板能够使桥梁颤振临界风速提高57%,并发现当翼板小幅度运动时理论分析和风洞试验吻合,当翼板大幅度运动时理论分析结果远小于风洞试验结果[3]。Del Aroc等基于控制面和加劲梁运动不会干扰对方流场的假定,通过理论分析发现当迎风侧控制控制面反向于加劲梁扭转运动,而背风侧控制面同向于加劲梁扭转运动时,控制效果最佳,可使悬索桥的颤振临界风速提高2倍以上[4]。论文通过风洞试验研究表明,在如文[4]最佳控制效果时,随着翼板相对于主梁的扭转速度增加,主梁的最大扭转角度有减小的趋势[5]。P Omenzetter 提出了一种装置,利用主缆和加劲梁之间的相对运动来驱动风嘴运动实现颤振主动控制,通过时域计算表明迎风风嘴相对主梁反相扭转,背风风嘴相对主梁同相扭转提高颤振稳定性效果良好[6-7]。2002年刘高基于非定常气动力理论,推算安装主动控制翼板后作用在整个桥梁的气动力表达式,从增加系统扭转阻尼的角度,研究了翼板扭转参数的选取[8]。2013年郭增偉以一座3000 m的悬索桥为例,分析了控制面扭转运动相位、运动方向和运动振幅对颤振的影响[9]。以上主动控制结果表明:合理选取主动控制翼板扭转运动参数,能够有效地提高桥梁的颤振稳定性。
上述文献中所采用的计算方法为频域或时域颤振计算方法,其中气动力由基于颤振导数的Scanlan公式表示,以上方法存在局限性:1)只能假设气动翼板作小位移运动,不能考虑流动分离现象。2)难以考虑主梁和气动翼板之间的气动力干扰效应。不同以往的研究方法。本文采用了新的方法——流固耦合技术对此问题进行研究。对商用软件FLUENT进行二次开发,建立主梁竖弯和扭转流固耦合数值仿真计算模型,设定气动翼板相对于主梁运动的运动规律,研究主动控制翼板对大跨度桥梁颤振稳定性的影响。该方法允许气动翼板的大幅度运动,可以考虑主梁和翼板之间的气动干扰效应。并通过结构受力分析初步揭示了颤振主动控制机理。
1数值仿真计算原理
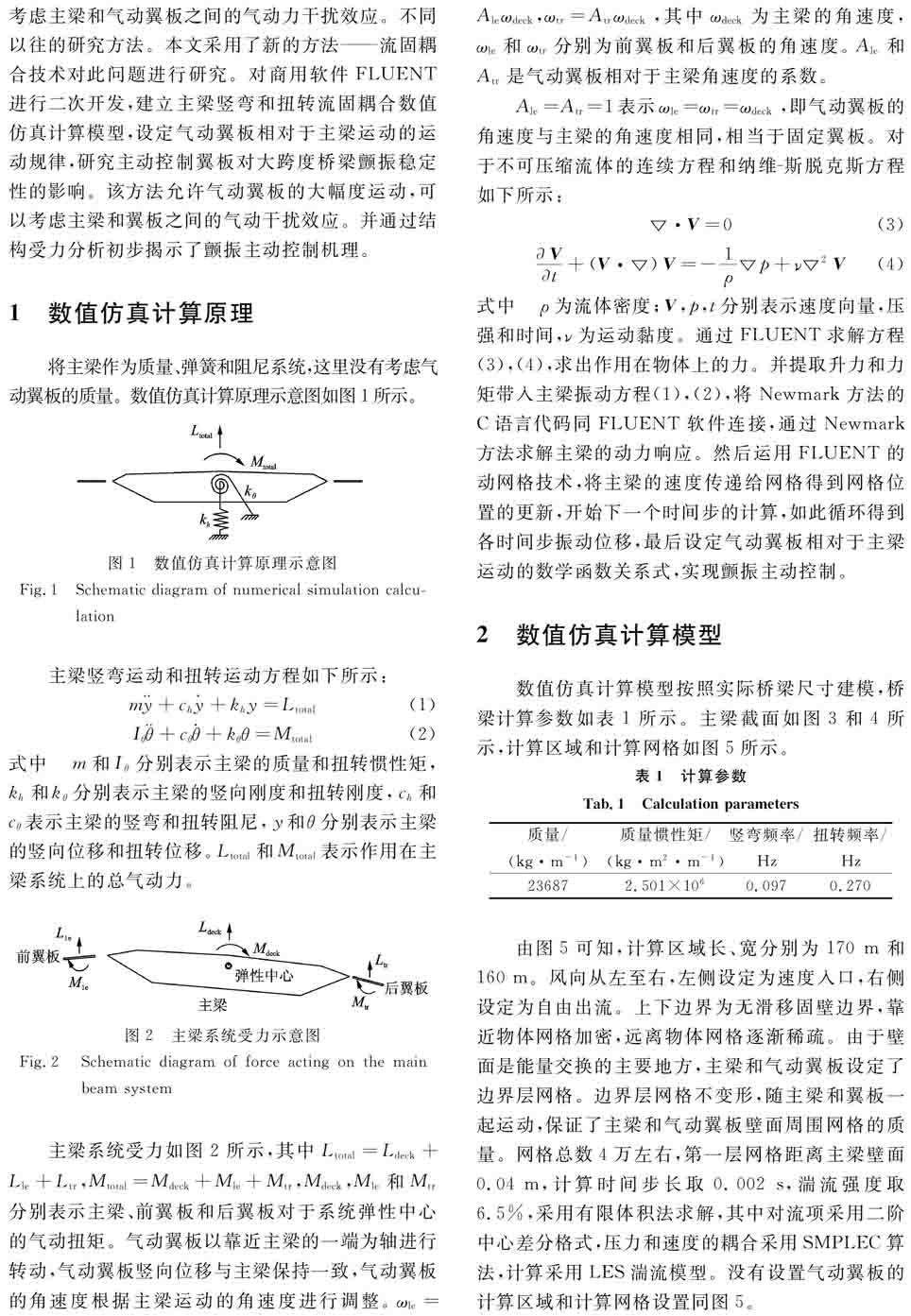
将主梁作为质量、弹簧和阻尼系统,这里没有考虑气动翼板的质量。数值仿真计算原理示意图如图1所示。
图1数值仿真计算原理示意图
Fig.1Schematic diagram of numerical simulation calculation
主梁竖弯运动和扭转运动方程如下所示:m+ch+khy=Ltotal(1)
Iθ+cθ+kθθ=Mtotal(2)式中m和Iθ分别表示主梁的质量和扭转惯性矩,kh和kθ分别表示主梁的竖向刚度和扭转刚度,ch和cθ表示主梁的竖弯和扭转阻尼,y和θ分别表示主梁的竖向位移和扭转位移。Ltotal和Mtotal表示作用在主梁系统上的总气动力。
图2主梁系统受力示意图
Fig.2Schematic diagram of force acting on the main beam system
主梁系统受力如图2所示,其中Ltotal=Ldeck+Lle+Ltr,Mtotal=Mdeck+Mle+Mtr,Mdeck,Mle和Mtr 分别表示主梁、前翼板和后翼板对于系统弹性中心的气动扭矩。气动翼板以靠近主梁的一端为轴进行转动,气动翼板竖向位移与主梁保持一致,气动翼板的角速度根据主梁运动的角速度进行调整。ωle=Aleωdeck,ωtr=Atrωdeck,其中ωdeck为主梁的角速度,ωle和ωtr分别为前翼板和后翼板的角速度。Ale和Atr是气动翼板相对于主梁角速度的系数。
Ale=Atr=1表示ωle=ωtr=ωdeck,即气动翼板的角速度与主梁的角速度相同,相当于固定翼板。对于不可压缩流体的连续方程和纳维-斯脱克斯方程如下所示:·V=0(3)
Vt+(V·)V=-1ρp+ν2V(4)式中ρ为流体密度;V,p,t分别表示速度向量,压强和时间,ν为运动黏度。通过FLUENT求解方程(3),(4),求出作用在物体上的力。并提取升力和力矩带入主梁振动方程(1),(2),将Newmark方法的C语言代码同FLUENT软件连接,通过Newmark方法求解主梁的动力响应。然后运用FLUENT的动网格技术,将主梁的速度传递给网格得到网格位置的更新,开始下一个时间步的计算,如此循环得到各时间步振动位移,最后设定气动翼板相对于主梁运动的数学函数关系式,实现颤振主动控制。
2数值仿真计算模型
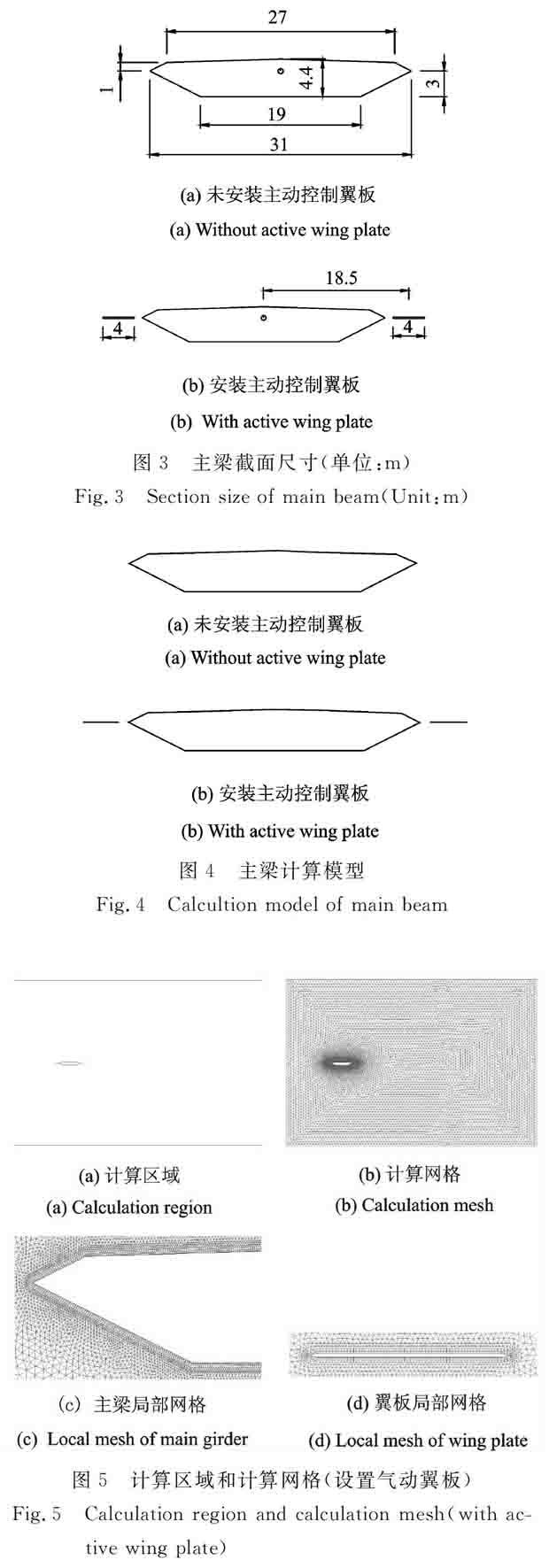
数值仿真计算模型按照实际桥梁尺寸建模,桥梁计算参数如表1所示。主梁截面如图3和4所示,计算区域和计算网格如图5所示。
表1计算参数
Tab.1Calculation parameters
质量/
(kg·m-1)质量惯性矩/
(kg·m2·m-1)竖弯频率/
Hz扭转频率/
Hz236872.501×1060.0970.270
图3主梁截面尺寸(单位:m)
Fig.3Section size of main beam(Unit:m)图4主梁计算模型
Fig.4Calcultion model of main beam
图5计算区域和计算网格(设置气动翼板)
Fig.5Calculation region and calculation mesh(with active wing plate)
由图5可知,计算区域长、宽分别为170 m和160 m。风向从左至右,左侧设定为速度入口,右侧设定为自由出流。上下边界为无滑移固壁边界,靠近物体网格加密,远离物体网格逐渐稀疏。由于壁面是能量交换的主要地方,主梁和气动翼板设定了边界层网格。边界层网格不变形,随主梁和翼板一起运动,保证了主梁和气动翼板壁面周围网格的质量。网格总数4万左右,第一层网格距离主梁壁面0.04 m,计算时间步长取0.002 s,湍流强度取6.5%,采用有限體积法求解,其中对流项采用二阶中心差分格式,压力和速度的耦合采用SMPLEC算法,计算采用LES湍流模型。没有设置气动翼板的计算区域和计算网格设置同图5。
3数值仿真计算结果〖*2〗3.1没有安装气动翼板竖弯阻尼比和扭转阻尼比取0.002,0°风攻角时竖向位移时程和扭转位移时程曲线如图6和7所示。
图6竖向位移时程曲线(未安装主动控制翼板)
Fig.6Time histories of vertical displacements(without active wing plate)
图7扭转位移时程曲线(未安装主动控制翼板)
Fig.7Time histories of torsional displacements(without active wing plate)如图6和7所示,当风速V=72 m/s时,主梁竖向位移幅值随时间基本保持不变,主梁扭转位移幅值随时间呈现衰减的趋势;当风速V=74 m/s时,主梁竖向位移和扭转位移幅值随时间逐渐增大,发生了弯扭耦合颤振,此时竖向振动频率和扭转振动频率大约是0.2 Hz,介于竖向自振频率和扭转自振频率之间。颤振临界风速如表2所示。
表2颤振临界风速[10]
Tab.2Critical flutter wind speed[10]
风攻
角/(°)颤振临界风速/(m·s-1)节段模型风洞实验数值计算070.0~72.972.0~74.0由表2可知,数值仿真计算值和节段模型风洞试验值吻合良好。
3.2安装气动翼板
竖弯阻尼比和扭转阻尼比取0.005,翼板运动方式主梁最大扭转位移的影响如表3所示。
由表3可知,以下工况颤振控制效果不好:1)当前翼板和后翼板都与主梁的扭转方向相同;2)前翼板和后翼板都与主梁的扭转方向相反;3)前翼板扭转方向与主梁的扭转方向相同,后翼板扭转方向与主梁的扭转方向相反。只有当前翼板扭转方向与主梁的扭转方向相反,后翼板扭转方向与主梁的扭转方向相同时,颤振控制效果良好。在这种情况下,随着翼板扭转速度的增加,主梁扭转角度减小。这种变化规律和文献[5]中风洞实验的结论一致。这时桥梁颤振临界风速达到120 m/s,提高到1.6倍以上。旋涡脱落如图8所示。
由图8可见,气动翼板发生了流动分离现象。由于气动翼板和主梁的运动,作用在翼板的流场和作用在主梁的流场相互干扰。作用在主梁系统上的力矩变化不仅来源于气动翼板的力矩,而且来源于流场形态的改变。当V=90 m/s,ωle=-12ωdeck,ωtr=12ωdeck时,扭转位移时程曲线和扭转速度时程曲线如图9和10所示。
由图9和10可知,主梁扭转位移很小,前翼板与主梁扭转运动方向相反,后翼板与主梁扭转运动
表3翼板角速度对主梁最大扭转位移的影响
Tab.3The influence of wing plate rotational velocity on maximum torsional displacement amplitude of the main beam
(a) V=75 m/s翼板扭转角速度/[(°)·s-1]主梁最大扭
转角度/(°)ωle=ωdeck,ωtr=ωdeck发散ωle=6ωdeck,ωtr=6ωdeck发散ωle=6ωdeck,ωtr=-6ωdeck发散ωle=-6ωdeck,ωtr=-6ωdeck发散ωle=-6ωdeck,ωtr=6ωdeck-2.2(b) V=90 m/s翼板扭转角速度/[(°)·s-1]主梁最大扭
转角度/(°)ωle=-4ωdeck,ωtr=4ωdeck发散ωle=-6ωdeck,ωtr=6ωdeck-3.528ωle=-12ωdeck,ωtr=12ωdeck-2.002ωle=-18ωdeck,ωtr=18ωdeck-1.177(c) V=120 m/s翼板扭转角速度/[(°)·s-1]主梁最大扭
转角度/(°)ωle=-6ωdeck,ωtr=6ωdeck发散ωle=-12ωdeck,ωtr=12ωdeck-2.656ωle=-18ωdeck,ωtr=18ωdeck-1.396图8旋涡脱落图
Fig.8Vortex shedding diagram
图9扭转位移时程曲线(安装主动控制翼板,V=90 m/s)
Fig.9Time histories of torsional displacements(with active wing plate,V=90 m/s )
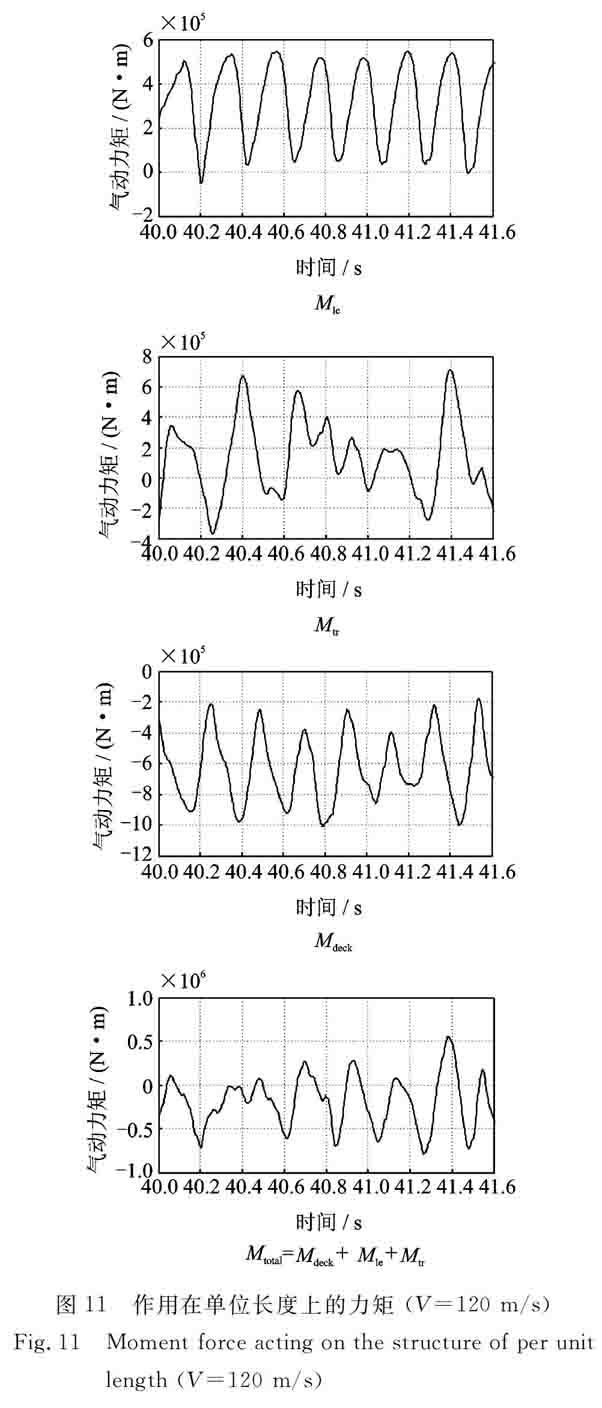
方向相同,前后翼板扭转速度和位移是主梁扭转速度和位移的12倍,运动规律与所设定的运动规律吻合。当V=120 m/s, ωle=-12ωdeck,ωtr=12ωdeck,时,对系统弹性中心取矩,作用在单位长度上的力矩位移时程曲线如图11所示。
由图11知,不考虑气动翼板的作用时,作用于主梁的气动力矩Mdeck为负值,均值约为-600000 N·m;前翼板和后翼板对主梁提供的气动力矩均值为正值,且与作用在主梁的气动力矩Mdeck相位相反。考虑气动翼板的作用后,作用在主梁系统的力矩Mtotal均值约为-300000 N·m,减小了一倍。同理分析得到当V=120 m/s, ωle=-18ωdeck,ωtr=18ωdeck ,前翼板和后翼板提供了更大的反向力矩,作用于整个主梁系统的力矩均值减小了,约为-200000 N·m。
Wilde等对设置不同气动翼板宽度(1.5,3.0,4.5,6 m)主梁的桥梁进行了颤振主动控制研究,Wilde认为气动翼宽度取为桥宽的0.1倍时,最为经济合理[11]。本文运用数值计算方法对此进行了研究,当V=120 m/s, ωle=-12ωdeck,ωtr=12ωdeck ,时,主梁最大扭转角度如表4所示。
图10扭转速度时程曲线(安装主动控制翼板,V=90 m/s)
Fig.10Time histories of torsional velocity(with active wing plate,V=90 m/s )
由表4可知,气动翼板长度为2 m时,颤振主动控制效果差。随着气动翼板长度增加,主梁最大扭转角度减小。随着气动翼板长度继续增加,主梁最大扭转角度又开始增加。气动翼板长度为主梁宽度的10%~15%,颤振主动控制效果较好,这与Wilde的研究结论基本相同。
表4不同翼板长度时主梁最大扭转角度(V=120 m/s)
Tab.4The maximum torsion angle of main beam under different length of wing plate (V=120 m/s)
翼板长度/m扭转角度/(°)2发散振动3-2.8344-2.0025-2.1156-2.3334结论
本文通过对FLUENT软件进行二次开发,运
图11作用在单位长度上的力矩 (V=120 m/s)
Fig.11Moment force acting on the structure of per unit length (V=120 m/s)
用流固耦合方法研究了主梁端部主动控制翼板对桥梁颤振稳定性的影响,主要结论如下:
(1)大海带桥颤振临界风速数值仿真计算值与风洞实验结果吻合良好,颤振形态为弯扭耦合颤振,符合流线型箱梁的颤振形态,颤振频率介于竖弯频率和扭转频率之间。
(2) 在主梁风嘴前后端安装主动控制翼板,当前翼板扭转运动方向与主梁的扭转方向相反,后翼板扭转运动方向与主梁扭转方向相同时,颤振控制效果良好。在此情况下,随着翼板相对于主梁的扭转速度增加,主梁的最大扭转角度有减小的趋势。 比没有安装气动翼板,颤振临界风速提高到1.6倍以上。
(3) 由旋渦脱落图可知作用在翼板的流场和作用在主梁的流场相互干扰,因此作用在整个系统上的力矩变化不仅来源于气动翼板的力矩,而且来源于流场形态的改变。在如(2)所述的良好控制时,由于气动翼板提供反向力矩,且与单独作用在主梁的气动力矩相位相反,最大限度地平衡了作用在主梁上的力矩,使作用在主梁系统上的力矩均值减小,这可能是主动控制翼板提高颤振稳定性的原因之一。
(4)气动翼板的长度过小或过大,颤振主动控制效果不好。当气动翼板长度为主梁宽度的10%~15%时,颤振主动控制效果较好。
流固耦合计算方法为桥梁颤振主动控制提供了一种新的研究手段,但主动控制翼板提高桥梁颤振稳定性的机理还需进一步深入研究。
参考文献:
[1]Ostenfeid K,Larsen A.Bridge engineering and aerodynamics[C] Proceedings of the First International Symposium on Aerodynamics of Large Bridges. A.A.Balkema, Rotterdam,1992:3—22.
[2]Kobayashi K,Nagaoka H.Active control of flutter of a suspension bridge[J]. Journal of Wind Engineering and Industrial Aerodynamics, 1992,41&44:143—151.
[3]Wilde K,Fujino Y,Kawakami T. Analytical and experimental study on passive aerodynamic control of flutter of a bridge deck[J]. Journal of Wind Engineering and Industrial Aerodynamics, 1999,80(1/2):105—119.
[4]DEL ARCO D C,APARICIO A C.Improving suspension bridge wind stability with aerodynamic appendages[J].Journal of Structural Engineering,1999, 125(12): 1367—1375.
[5]具有主動振动控制桥梁模型的风洞试验[J].杨永贤,译.公路交通技术,2002,(4):78—81.
Wind-tunnel test of a bridge model with active vibration control[J].Translated by YANG Yong-xian.Technology of Highway and Transport,2002,(4):78—81.
[6]Omenzetter P, Wilde K, Fujino Y, Suppression of wind-induced instabilities of a long span bridge by a passive deck-flaps control system Part I: Numerical simulations[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2000:61—79.
[7]Omenzetter P,Wilde K, Fujino Y. Suppression of wind-induced instabilities of a long span bridge by a passive deck-flaps control system Part II: Numerical simulations[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2000:81—91.
[8]刘高,强士中,王秀伟.主动控制翼板抑制悬索桥颤振研究[J].应用力学学报,2002,19(4):52—57.
LIU Gao, QIANG Shi-zhong ,WANG Xiu-wei,Study of active control wing plate for flutter suppression of long span suspension bridge[J]. Chinese Journal of Applied Mechanics, 2002,19(4):52—57.
[9]郭增伟,杨詠昕,葛耀君.大跨悬索桥颤振主动控制面理论研究[J].中国公路学报,2013,26(2):119—126.
GUO Zeng-wei,YANG Yong-xin,GE Yao-jun.Theoretical study of active control surface for flutter suppression of long span suspension bridge[J].China Journal of Highway and Transport,2013,26(2): 119—126.
[10]Niels J Gimsing.大贝耳特海峡:东桥[M].西南交通大学土木工程学院桥梁工程系,中铁大桥局武汉桥梁科学研究院译.成都:西南交通大学出版社,2008:136—137.
Niels J Gimsing. Great Belt Strait: East Bridge[M]. Translated by School of Civil Engineering, Southwest Jiaotong University, Bridge Science Research Institute Ltd.,China Railway Major Bridge Engineering Group. Chengdu:Southwest Jiaotong University Press,2008:136—137.
[11]Wilde K,Omenze P,Fujino Y.Suppression of bridge flutter by active deck-flaps control system[J].Journal of Engineering Mechanics,2001,127(1):80—90.
Flutter active control studies of bridge with flaps attached to
deck edge by FSI calculation
ZHAN Hao1,2, LIAO Hai-li1
(1.School of Civil Engineering, Southwest Jiaotong University, Chengdu 610031, China;
2.China Railway Major Bridge Reconnaissance & Design Institute Co., Ltd., Wuhan 430056, China)
Abstract: Long span suspension bridges, due to their flexibility and lightness, are much prone to flutter instability. A relatively new research area on aerodynamic stability for long span bridges is based on actively controlled flaps attached along the girders. Different from previous research, this paper proposes a new method to study the question. By secondary development of commercial computational fluid dynamics software FLUENT, the paper establishes a two-dimensional bending and torsional fluid-structure interaction numerical model to study flutter stability of a long span suspension bridges with active control wing plate which is attached directly to the edges of the deck. This method not only allows the large amplitude motion of the wing plate, but also considers the interaction between the aerodynamic force of the main beam and wing plate. The flutter stability is studied by controlling the rotational velocity of the wing plates with respect to that of the bridge deck. Numerical results show that the flutter critical wind speed of girder without wing plate is in good agreement with wind tunnel test. It is an optimal control law that the leading surface rotates in the opposite direction and the trailing surface rotates in the same direction with respect to the deck motion. The maximum torsional displacement amplitude decreases when increasing the rotational velocity of the winglet with respect to that of the deck. The rule is consistent with the conclusion of the wind tunnel experiment of relevant literature. The vortex shedding flow shows that in this system the flow patterns around the deck and flap are interacted by each other. So the stabilizing moment not only comes from the aerodynamic forces generated on control wing plates but can also be achieved through modification of the aerodynamic forces induced on the bridge deck. The calculated results show that in the optimal control, the aerodynamic wing provides the reverse moment and the moment phase is opposite to that of the main beam. It will maximize the moment balance of the main beam and decreases the average moment on the main beam system. This may be one of the reasons to improve the flutter stability of bridge with active wing plate. Finally, the proper length of the aerodynamic wing plate is studied. The calculation results show that the flutter active control is better when the wing length is 10%-15% of the main beam width.
Key words: bridge engineering;fluid-structure interaction; critical flutter wind speed; flutter active control; wing plate attached to edges of deck
摘要: 安装主动控制翼板是提高大跨度桥梁颤振稳定性的一种有效方法。运用流固耦合技术对桥梁颤振主动控制进行计算分析,可以考虑气动翼板的大幅度扭转以及气动翼板和主梁端部的气动干扰效应。通过对商用软件FLUENT二次开发,建立了竖弯和扭转流固耦合数值仿真计算模型,并对主梁端部安装了主动控制翼板的大海带桥的颤振稳定性进行了数值仿真计算分析。系统地研究了前后翼板相对于主梁的角速度对颤振性能的影响。数值仿真计算结果表明:没有采用主动控制翼板时,颤振临界风速计算值和风洞实验值吻合良好。采用主动控制翼板后,当前翼板角速度与主梁反向,后翼板角速度与主梁同向时控制效果良好。且随着气动翼板角速度增大,主梁扭转位移减小。旋涡脱落图表明:作用在翼板的流场和作用在主梁的流场相互干扰,因此作用在整个系统上的力矩变化不仅来源于气动翼板的力矩,而且来源于流场形态的改变。计算表明在上述良好的控制时,气动翼板提供反向力矩,且与作用在主梁上的力矩相位相反,最大限度地平衡了作用在主梁上的力矩,使作用在主梁系统上的力矩均值减小,这是主动控制翼板提高桥梁颤振稳定性的原因之一。最后研究了气动翼板合适长度,计算表明:当气动翼板长度为主梁宽度的10%~15%时,颤振主动控制效果较好。
关键词: 桥梁工程; 流固耦合; 颤振临界风速; 颤振主动控制; 主梁端部翼板
中图分类号: U441+.3文献标志码: A文章编号: 1004-4523(2018)02-0276-07
DOI:10.16385/j.cnki.issn.1004-4523.2018.02.010
引言
颤振通常是一种具有发散性质的自激振动,会对桥梁结构造成灾难性破坏。安装主动控制翼板是提高桥梁颤振稳定性的有效方法。自1992年Ostenfeld和Larsen提出利用主动控制翼板抑制桥梁颤振的概念以来[1],关于主动控制翼板的实验与理论研究正逐渐引起桥梁工程界的关注。1992年Kobayashi 和Nagaoka 发表了第一篇关于桥梁主动控制的文章,通过节段模型风洞试验表明主动控制翼板能将颤振临界风速提高一倍[2]。1999年Wilde 和 Fujino通过理论分析和风洞试验得出运用主动控制翼板能够使桥梁颤振临界风速提高57%,并发现当翼板小幅度运动时理论分析和风洞试验吻合,当翼板大幅度运动时理论分析结果远小于风洞试验结果[3]。Del Aroc等基于控制面和加劲梁运动不会干扰对方流场的假定,通过理论分析发现当迎风侧控制控制面反向于加劲梁扭转运动,而背风侧控制面同向于加劲梁扭转运动时,控制效果最佳,可使悬索桥的颤振临界风速提高2倍以上[4]。论文通过风洞试验研究表明,在如文[4]最佳控制效果时,随着翼板相对于主梁的扭转速度增加,主梁的最大扭转角度有减小的趋势[5]。P Omenzetter 提出了一种装置,利用主缆和加劲梁之间的相对运动来驱动风嘴运动实现颤振主动控制,通过时域计算表明迎风风嘴相对主梁反相扭转,背风风嘴相对主梁同相扭转提高颤振稳定性效果良好[6-7]。2002年刘高基于非定常气动力理论,推算安装主动控制翼板后作用在整个桥梁的气动力表达式,从增加系统扭转阻尼的角度,研究了翼板扭转参数的选取[8]。2013年郭增偉以一座3000 m的悬索桥为例,分析了控制面扭转运动相位、运动方向和运动振幅对颤振的影响[9]。以上主动控制结果表明:合理选取主动控制翼板扭转运动参数,能够有效地提高桥梁的颤振稳定性。
上述文献中所采用的计算方法为频域或时域颤振计算方法,其中气动力由基于颤振导数的Scanlan公式表示,以上方法存在局限性:1)只能假设气动翼板作小位移运动,不能考虑流动分离现象。2)难以考虑主梁和气动翼板之间的气动力干扰效应。不同以往的研究方法。本文采用了新的方法——流固耦合技术对此问题进行研究。对商用软件FLUENT进行二次开发,建立主梁竖弯和扭转流固耦合数值仿真计算模型,设定气动翼板相对于主梁运动的运动规律,研究主动控制翼板对大跨度桥梁颤振稳定性的影响。该方法允许气动翼板的大幅度运动,可以考虑主梁和翼板之间的气动干扰效应。并通过结构受力分析初步揭示了颤振主动控制机理。
1数值仿真计算原理
将主梁作为质量、弹簧和阻尼系统,这里没有考虑气动翼板的质量。数值仿真计算原理示意图如图1所示。
图1数值仿真计算原理示意图
Fig.1Schematic diagram of numerical simulation calculation
主梁竖弯运动和扭转运动方程如下所示:m+ch+khy=Ltotal(1)
Iθ+cθ+kθθ=Mtotal(2)式中m和Iθ分别表示主梁的质量和扭转惯性矩,kh和kθ分别表示主梁的竖向刚度和扭转刚度,ch和cθ表示主梁的竖弯和扭转阻尼,y和θ分别表示主梁的竖向位移和扭转位移。Ltotal和Mtotal表示作用在主梁系统上的总气动力。
图2主梁系统受力示意图
Fig.2Schematic diagram of force acting on the main beam system
主梁系统受力如图2所示,其中Ltotal=Ldeck+Lle+Ltr,Mtotal=Mdeck+Mle+Mtr,Mdeck,Mle和Mtr 分别表示主梁、前翼板和后翼板对于系统弹性中心的气动扭矩。气动翼板以靠近主梁的一端为轴进行转动,气动翼板竖向位移与主梁保持一致,气动翼板的角速度根据主梁运动的角速度进行调整。ωle=Aleωdeck,ωtr=Atrωdeck,其中ωdeck为主梁的角速度,ωle和ωtr分别为前翼板和后翼板的角速度。Ale和Atr是气动翼板相对于主梁角速度的系数。
Ale=Atr=1表示ωle=ωtr=ωdeck,即气动翼板的角速度与主梁的角速度相同,相当于固定翼板。对于不可压缩流体的连续方程和纳维-斯脱克斯方程如下所示:·V=0(3)
Vt+(V·)V=-1ρp+ν2V(4)式中ρ为流体密度;V,p,t分别表示速度向量,压强和时间,ν为运动黏度。通过FLUENT求解方程(3),(4),求出作用在物体上的力。并提取升力和力矩带入主梁振动方程(1),(2),将Newmark方法的C语言代码同FLUENT软件连接,通过Newmark方法求解主梁的动力响应。然后运用FLUENT的动网格技术,将主梁的速度传递给网格得到网格位置的更新,开始下一个时间步的计算,如此循环得到各时间步振动位移,最后设定气动翼板相对于主梁运动的数学函数关系式,实现颤振主动控制。
2数值仿真计算模型
数值仿真计算模型按照实际桥梁尺寸建模,桥梁计算参数如表1所示。主梁截面如图3和4所示,计算区域和计算网格如图5所示。
表1计算参数
Tab.1Calculation parameters
质量/
(kg·m-1)质量惯性矩/
(kg·m2·m-1)竖弯频率/
Hz扭转频率/
Hz236872.501×1060.0970.270
图3主梁截面尺寸(单位:m)
Fig.3Section size of main beam(Unit:m)图4主梁计算模型
Fig.4Calcultion model of main beam
图5计算区域和计算网格(设置气动翼板)
Fig.5Calculation region and calculation mesh(with active wing plate)
由图5可知,计算区域长、宽分别为170 m和160 m。风向从左至右,左侧设定为速度入口,右侧设定为自由出流。上下边界为无滑移固壁边界,靠近物体网格加密,远离物体网格逐渐稀疏。由于壁面是能量交换的主要地方,主梁和气动翼板设定了边界层网格。边界层网格不变形,随主梁和翼板一起运动,保证了主梁和气动翼板壁面周围网格的质量。网格总数4万左右,第一层网格距离主梁壁面0.04 m,计算时间步长取0.002 s,湍流强度取6.5%,采用有限體积法求解,其中对流项采用二阶中心差分格式,压力和速度的耦合采用SMPLEC算法,计算采用LES湍流模型。没有设置气动翼板的计算区域和计算网格设置同图5。
3数值仿真计算结果〖*2〗3.1没有安装气动翼板竖弯阻尼比和扭转阻尼比取0.002,0°风攻角时竖向位移时程和扭转位移时程曲线如图6和7所示。
图6竖向位移时程曲线(未安装主动控制翼板)
Fig.6Time histories of vertical displacements(without active wing plate)
图7扭转位移时程曲线(未安装主动控制翼板)
Fig.7Time histories of torsional displacements(without active wing plate)如图6和7所示,当风速V=72 m/s时,主梁竖向位移幅值随时间基本保持不变,主梁扭转位移幅值随时间呈现衰减的趋势;当风速V=74 m/s时,主梁竖向位移和扭转位移幅值随时间逐渐增大,发生了弯扭耦合颤振,此时竖向振动频率和扭转振动频率大约是0.2 Hz,介于竖向自振频率和扭转自振频率之间。颤振临界风速如表2所示。
表2颤振临界风速[10]
Tab.2Critical flutter wind speed[10]
风攻
角/(°)颤振临界风速/(m·s-1)节段模型风洞实验数值计算070.0~72.972.0~74.0由表2可知,数值仿真计算值和节段模型风洞试验值吻合良好。
3.2安装气动翼板
竖弯阻尼比和扭转阻尼比取0.005,翼板运动方式主梁最大扭转位移的影响如表3所示。
由表3可知,以下工况颤振控制效果不好:1)当前翼板和后翼板都与主梁的扭转方向相同;2)前翼板和后翼板都与主梁的扭转方向相反;3)前翼板扭转方向与主梁的扭转方向相同,后翼板扭转方向与主梁的扭转方向相反。只有当前翼板扭转方向与主梁的扭转方向相反,后翼板扭转方向与主梁的扭转方向相同时,颤振控制效果良好。在这种情况下,随着翼板扭转速度的增加,主梁扭转角度减小。这种变化规律和文献[5]中风洞实验的结论一致。这时桥梁颤振临界风速达到120 m/s,提高到1.6倍以上。旋涡脱落如图8所示。
由图8可见,气动翼板发生了流动分离现象。由于气动翼板和主梁的运动,作用在翼板的流场和作用在主梁的流场相互干扰。作用在主梁系统上的力矩变化不仅来源于气动翼板的力矩,而且来源于流场形态的改变。当V=90 m/s,ωle=-12ωdeck,ωtr=12ωdeck时,扭转位移时程曲线和扭转速度时程曲线如图9和10所示。
由图9和10可知,主梁扭转位移很小,前翼板与主梁扭转运动方向相反,后翼板与主梁扭转运动
表3翼板角速度对主梁最大扭转位移的影响
Tab.3The influence of wing plate rotational velocity on maximum torsional displacement amplitude of the main beam
(a) V=75 m/s翼板扭转角速度/[(°)·s-1]主梁最大扭
转角度/(°)ωle=ωdeck,ωtr=ωdeck发散ωle=6ωdeck,ωtr=6ωdeck发散ωle=6ωdeck,ωtr=-6ωdeck发散ωle=-6ωdeck,ωtr=-6ωdeck发散ωle=-6ωdeck,ωtr=6ωdeck-2.2(b) V=90 m/s翼板扭转角速度/[(°)·s-1]主梁最大扭
转角度/(°)ωle=-4ωdeck,ωtr=4ωdeck发散ωle=-6ωdeck,ωtr=6ωdeck-3.528ωle=-12ωdeck,ωtr=12ωdeck-2.002ωle=-18ωdeck,ωtr=18ωdeck-1.177(c) V=120 m/s翼板扭转角速度/[(°)·s-1]主梁最大扭
转角度/(°)ωle=-6ωdeck,ωtr=6ωdeck发散ωle=-12ωdeck,ωtr=12ωdeck-2.656ωle=-18ωdeck,ωtr=18ωdeck-1.396图8旋涡脱落图
Fig.8Vortex shedding diagram
图9扭转位移时程曲线(安装主动控制翼板,V=90 m/s)
Fig.9Time histories of torsional displacements(with active wing plate,V=90 m/s )
方向相同,前后翼板扭转速度和位移是主梁扭转速度和位移的12倍,运动规律与所设定的运动规律吻合。当V=120 m/s, ωle=-12ωdeck,ωtr=12ωdeck,时,对系统弹性中心取矩,作用在单位长度上的力矩位移时程曲线如图11所示。
由图11知,不考虑气动翼板的作用时,作用于主梁的气动力矩Mdeck为负值,均值约为-600000 N·m;前翼板和后翼板对主梁提供的气动力矩均值为正值,且与作用在主梁的气动力矩Mdeck相位相反。考虑气动翼板的作用后,作用在主梁系统的力矩Mtotal均值约为-300000 N·m,减小了一倍。同理分析得到当V=120 m/s, ωle=-18ωdeck,ωtr=18ωdeck ,前翼板和后翼板提供了更大的反向力矩,作用于整个主梁系统的力矩均值减小了,约为-200000 N·m。
Wilde等对设置不同气动翼板宽度(1.5,3.0,4.5,6 m)主梁的桥梁进行了颤振主动控制研究,Wilde认为气动翼宽度取为桥宽的0.1倍时,最为经济合理[11]。本文运用数值计算方法对此进行了研究,当V=120 m/s, ωle=-12ωdeck,ωtr=12ωdeck ,时,主梁最大扭转角度如表4所示。
图10扭转速度时程曲线(安装主动控制翼板,V=90 m/s)
Fig.10Time histories of torsional velocity(with active wing plate,V=90 m/s )
由表4可知,气动翼板长度为2 m时,颤振主动控制效果差。随着气动翼板长度增加,主梁最大扭转角度减小。随着气动翼板长度继续增加,主梁最大扭转角度又开始增加。气动翼板长度为主梁宽度的10%~15%,颤振主动控制效果较好,这与Wilde的研究结论基本相同。
表4不同翼板长度时主梁最大扭转角度(V=120 m/s)
Tab.4The maximum torsion angle of main beam under different length of wing plate (V=120 m/s)
翼板长度/m扭转角度/(°)2发散振动3-2.8344-2.0025-2.1156-2.3334结论
本文通过对FLUENT软件进行二次开发,运
图11作用在单位长度上的力矩 (V=120 m/s)
Fig.11Moment force acting on the structure of per unit length (V=120 m/s)
用流固耦合方法研究了主梁端部主动控制翼板对桥梁颤振稳定性的影响,主要结论如下:
(1)大海带桥颤振临界风速数值仿真计算值与风洞实验结果吻合良好,颤振形态为弯扭耦合颤振,符合流线型箱梁的颤振形态,颤振频率介于竖弯频率和扭转频率之间。
(2) 在主梁风嘴前后端安装主动控制翼板,当前翼板扭转运动方向与主梁的扭转方向相反,后翼板扭转运动方向与主梁扭转方向相同时,颤振控制效果良好。在此情况下,随着翼板相对于主梁的扭转速度增加,主梁的最大扭转角度有减小的趋势。 比没有安装气动翼板,颤振临界风速提高到1.6倍以上。
(3) 由旋渦脱落图可知作用在翼板的流场和作用在主梁的流场相互干扰,因此作用在整个系统上的力矩变化不仅来源于气动翼板的力矩,而且来源于流场形态的改变。在如(2)所述的良好控制时,由于气动翼板提供反向力矩,且与单独作用在主梁的气动力矩相位相反,最大限度地平衡了作用在主梁上的力矩,使作用在主梁系统上的力矩均值减小,这可能是主动控制翼板提高颤振稳定性的原因之一。
(4)气动翼板的长度过小或过大,颤振主动控制效果不好。当气动翼板长度为主梁宽度的10%~15%时,颤振主动控制效果较好。
流固耦合计算方法为桥梁颤振主动控制提供了一种新的研究手段,但主动控制翼板提高桥梁颤振稳定性的机理还需进一步深入研究。
参考文献:
[1]Ostenfeid K,Larsen A.Bridge engineering and aerodynamics[C] Proceedings of the First International Symposium on Aerodynamics of Large Bridges. A.A.Balkema, Rotterdam,1992:3—22.
[2]Kobayashi K,Nagaoka H.Active control of flutter of a suspension bridge[J]. Journal of Wind Engineering and Industrial Aerodynamics, 1992,41&44:143—151.
[3]Wilde K,Fujino Y,Kawakami T. Analytical and experimental study on passive aerodynamic control of flutter of a bridge deck[J]. Journal of Wind Engineering and Industrial Aerodynamics, 1999,80(1/2):105—119.
[4]DEL ARCO D C,APARICIO A C.Improving suspension bridge wind stability with aerodynamic appendages[J].Journal of Structural Engineering,1999, 125(12): 1367—1375.
[5]具有主動振动控制桥梁模型的风洞试验[J].杨永贤,译.公路交通技术,2002,(4):78—81.
Wind-tunnel test of a bridge model with active vibration control[J].Translated by YANG Yong-xian.Technology of Highway and Transport,2002,(4):78—81.
[6]Omenzetter P, Wilde K, Fujino Y, Suppression of wind-induced instabilities of a long span bridge by a passive deck-flaps control system Part I: Numerical simulations[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2000:61—79.
[7]Omenzetter P,Wilde K, Fujino Y. Suppression of wind-induced instabilities of a long span bridge by a passive deck-flaps control system Part II: Numerical simulations[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2000:81—91.
[8]刘高,强士中,王秀伟.主动控制翼板抑制悬索桥颤振研究[J].应用力学学报,2002,19(4):52—57.
LIU Gao, QIANG Shi-zhong ,WANG Xiu-wei,Study of active control wing plate for flutter suppression of long span suspension bridge[J]. Chinese Journal of Applied Mechanics, 2002,19(4):52—57.
[9]郭增伟,杨詠昕,葛耀君.大跨悬索桥颤振主动控制面理论研究[J].中国公路学报,2013,26(2):119—126.
GUO Zeng-wei,YANG Yong-xin,GE Yao-jun.Theoretical study of active control surface for flutter suppression of long span suspension bridge[J].China Journal of Highway and Transport,2013,26(2): 119—126.
[10]Niels J Gimsing.大贝耳特海峡:东桥[M].西南交通大学土木工程学院桥梁工程系,中铁大桥局武汉桥梁科学研究院译.成都:西南交通大学出版社,2008:136—137.
Niels J Gimsing. Great Belt Strait: East Bridge[M]. Translated by School of Civil Engineering, Southwest Jiaotong University, Bridge Science Research Institute Ltd.,China Railway Major Bridge Engineering Group. Chengdu:Southwest Jiaotong University Press,2008:136—137.
[11]Wilde K,Omenze P,Fujino Y.Suppression of bridge flutter by active deck-flaps control system[J].Journal of Engineering Mechanics,2001,127(1):80—90.
Flutter active control studies of bridge with flaps attached to
deck edge by FSI calculation
ZHAN Hao1,2, LIAO Hai-li1
(1.School of Civil Engineering, Southwest Jiaotong University, Chengdu 610031, China;
2.China Railway Major Bridge Reconnaissance & Design Institute Co., Ltd., Wuhan 430056, China)
Abstract: Long span suspension bridges, due to their flexibility and lightness, are much prone to flutter instability. A relatively new research area on aerodynamic stability for long span bridges is based on actively controlled flaps attached along the girders. Different from previous research, this paper proposes a new method to study the question. By secondary development of commercial computational fluid dynamics software FLUENT, the paper establishes a two-dimensional bending and torsional fluid-structure interaction numerical model to study flutter stability of a long span suspension bridges with active control wing plate which is attached directly to the edges of the deck. This method not only allows the large amplitude motion of the wing plate, but also considers the interaction between the aerodynamic force of the main beam and wing plate. The flutter stability is studied by controlling the rotational velocity of the wing plates with respect to that of the bridge deck. Numerical results show that the flutter critical wind speed of girder without wing plate is in good agreement with wind tunnel test. It is an optimal control law that the leading surface rotates in the opposite direction and the trailing surface rotates in the same direction with respect to the deck motion. The maximum torsional displacement amplitude decreases when increasing the rotational velocity of the winglet with respect to that of the deck. The rule is consistent with the conclusion of the wind tunnel experiment of relevant literature. The vortex shedding flow shows that in this system the flow patterns around the deck and flap are interacted by each other. So the stabilizing moment not only comes from the aerodynamic forces generated on control wing plates but can also be achieved through modification of the aerodynamic forces induced on the bridge deck. The calculated results show that in the optimal control, the aerodynamic wing provides the reverse moment and the moment phase is opposite to that of the main beam. It will maximize the moment balance of the main beam and decreases the average moment on the main beam system. This may be one of the reasons to improve the flutter stability of bridge with active wing plate. Finally, the proper length of the aerodynamic wing plate is studied. The calculation results show that the flutter active control is better when the wing length is 10%-15% of the main beam width.
Key words: bridge engineering;fluid-structure interaction; critical flutter wind speed; flutter active control; wing plate attached to edges of deck
