FPP拖轮救助抛锚船舶中带缆方式的探讨
2003年救捞体质改革以来,国家对海上人命救助不断重视,救助装备不断更新,新型的救助船舶逐年增加,海上船舶救助能力得到很大的提升。特别是8 000kw型专业船舶装备了前后侧推、可变螺距、双独立舵系统、DP操纵系统等设备,使得船舶在救助中的动态稳定跟踪变得简单,稳定能力更强。但是在现役的救助船舶中还有一批1 940kw的老旧船舶,其设备单一,采用FPP螺旋桨推动,动态稳定跟踪能力相对薄弱,在救助接拖过程中发生的险情概率较大。本文通过介绍FPP船舶在大风浪中救助锚泊船舶的两种接拖方式,比较其中的优缺点,探讨合适的带缆方式,提升CPP船舶的接拖能力和作业的可操作性与安全性。
一、FPP船舶两种带缆模式的优缺点
海上拖救有多种情况,如拖救锚泊船,拖救漂浮船舶、拖救搁浅船舶等。拖救过程分为接拖、拖航和解拖三个过程,每个过程中多存在着风险,如接拖中的船舶碰撞、拖航中的船舶偏荡断缆等。本节主要讨论拖救锚泊船接拖的两种不同方式的优缺点和存在的风险。
1 接拖带缆的方式介绍
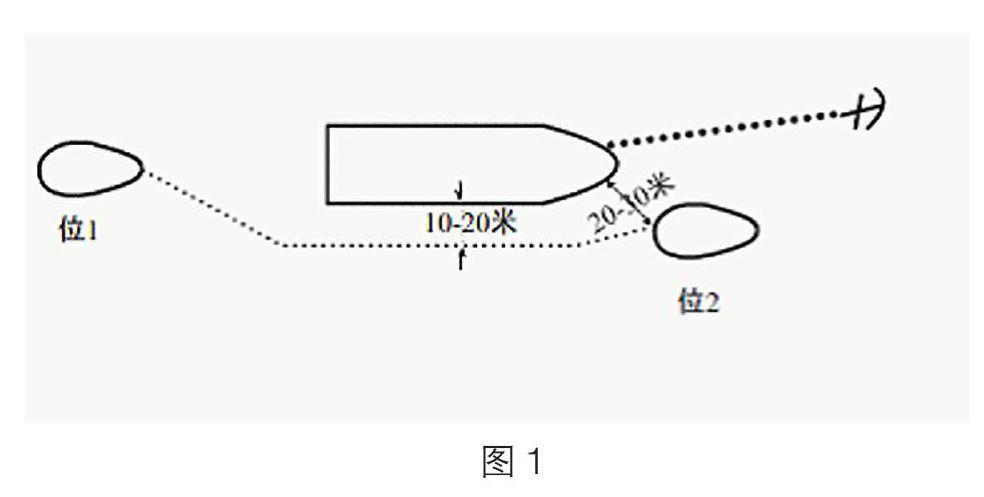
1.1 动态稳定带缆:要求救助船舶通过本船车、舵的不断变化,克服风流对船舶的影响,稳定待救船舶前部保持20~30米之间至少30分钟(通常带妥一对龙须缆绳需要30分钟左右)。如图1:
救助船在位置1处寻找风流合力方向即船舶的稳定航向,然后从锚泊船抛锚的异舷控制横距10~20米上行,将船舶行驶到待救船舶船首20~30米后稳定,在确认能稳定住船位后再通知撇缆并实施带缆,此带缆方式在救助中最为常用。
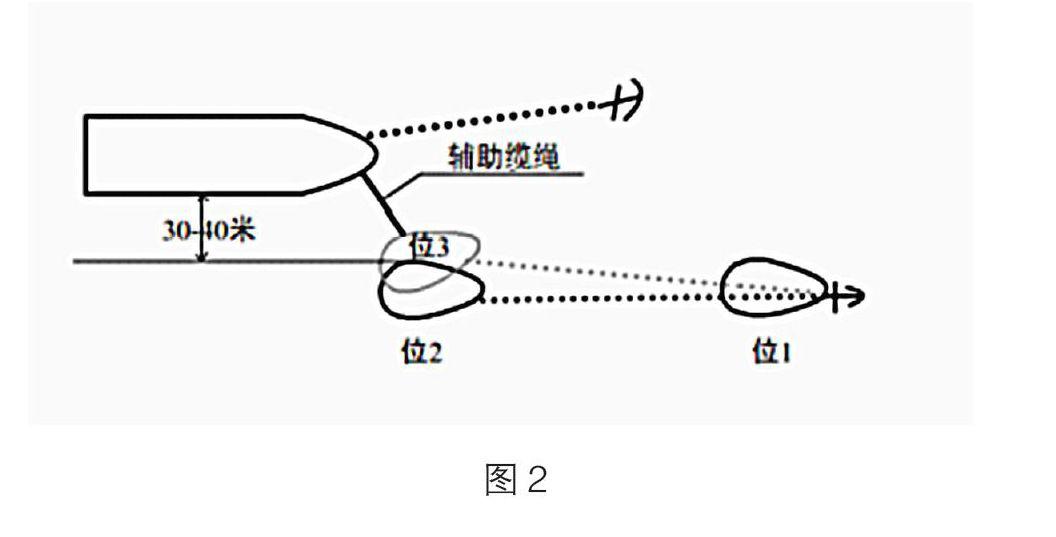
1.2 抛锚带缆:救助船舶在待救船舶首向前下锚,逐渐送出锚链后退接近待救船舶实施带缆。如图2:
选择合适的位置(位1)下锚,后退船舶尾部和待救船舶首部平(位2),通过控制船舶的首向与风流夹角横向移动接近(位3),稳定位置3实施带缆绳(通过压舵或者辅助缆绳稳定)。
2 两种带缆方式的特点
为确保大风浪中船舶拖救过程的安全,救助船舶通常以带龙须缆的方式实施带缆工作,目的是防止或减小船舶在拖带过程中产生的偏荡而造成断缆。这项带缆作业一般所需30分钟左右才能完成,而两种船舶的带缆方式有各自的特点和风险存在。
2.1动态稳定带缆:其特点为救助船舶机动性较好,但是需要船舶操纵人员具有很好的动态稳定跟踪船位的能力,能够熟练的掌握船舶的操纵性能和风流对船舶的影响,不断的变换船舶的车舵,控制船位达到船舶横向和纵向的稳定。
接拖方式存在的不足和潜在的风险:
2.1.1 要求船舶操纵者长时间保持精力高度集中,准确判断本船的运动状态,及时调整船舶的用车用舵,控制艏向与风流的夹角,一旦误判或判断迟缓,未能及时调整,船舶间的相对位移增大,恢复到初始稳定状态的过程将较长。
2.1.2 待救船舶偏荡时,对救助船舶稳定接拖船位带来困难,要掌握好船舶偏荡的中心位置和偏幅,救助船舶应以静制动,稳定一个位置,实现频繁来回跟踪对FPP船舶难度相当大。
2.1.3 密切关注救助船舶与待救船舶的锚链相对位置,应避开待救船舶的正前方,一旦距离过近,存在螺旋桨打到锚链的风险。
2.1.4 带缆过程中一旦船舶控制不好,船位偏远,缆绳不断外送,缆绳水中阻力增大,待救船上绞拖缆难度较大,甚至无法拉上。水中缆绳漂浮过多容易使救助船舶发生螺旋桨缠绕的险情。例如2009年10月4日 我局某1940kw船舶在救助主机故障船“万舟兴2”过程中,由于船长在作业过程中未注意控制好船位,船舶倒退时水中缆绳进入本船船底,造成缆绳缠绕事故。
因此,采用动态稳定跟踪带缆方式,一是要船长提高稳定本船船位的能力,二是要提升甲板带缆的能力,缩短带缆时间,减小风险存在的时间。
2.2 抛锚带缆:其特点为救助船舶与待救船舶间的相对位置稳定,可提供较短的作业距离和较长的作业时间。在有辅助缆绳的情况下, 船舶操纵时的精力集中度可适当缓减,船舶风流影响程度减弱,偏荡影响减小,对于FPP救助拖轮来说,螺旋桨与待救船舶锚链之间擦碰的影响较小,一旦有影响也可停车制动。例如,2012年2月15日,我局某轮在枸杞岛南面1.8海里处拖救舵机故障满载集装箱货轮“SHENG SONG 168”轮时采用待救船锚链起到5节甲板,救助船在前0.09处抛锚(5节落水)带缆,保持尾部与难船距离15至20米,送上钢丝龙须缆,完成带缆工作。
抛锚带缆接拖存在的不足和潜在的风险:
2.2.1 选择合适的下锚位置不易掌握。下锚位置过远,在送出锚链时造成长度不足,下锚位置过近,送出锚链长度不足,抓力不够造成走锚。
2.2.2 在抛锚送链过程中,未控制好后退速度造成走锚。而一旦救助船舶走锚,将发生船舶碰撞的风险。
2.2.3 下锚位置未控制好横向距离,会产生船位在待救船舶的正前方,存在待救船舶锚链对救助船舶螺旋桨的威胁,两根锚链也有发生缠绕的可能。
2.2.4 避免在船舶转流情况下实施作业,在旋转流影响的海域,尽量缩短作业时间,防止因转流角度造成两船相对位置变化过大。
二、FPP船舶锚泊带缆的作业方法
通过上述的分析,笔者认为在大风浪水流相对稳定的情况下,FPP船舶可采用抛锚带缆为更佳的作业方式,不仅提供足够的甲板作业时间,而且为船舶带缆作业提供了安全保障。
通常在实施锚泊带缆有以下几个作业过程:
1 掌握待救船舶及周围水文气象状况,做好充分的接拖准备
接拖时,应先观察待拖船锚泊中的航向,有无偏荡现象及偏荡程度,风、流与该待拖船的首向关系。救助船在接近接拖位置前,应先通知待救船收短锚链至维持不走锚的长度,减少其偏荡和对螺旋桨的威胁。
2 确定合适的下锚位置
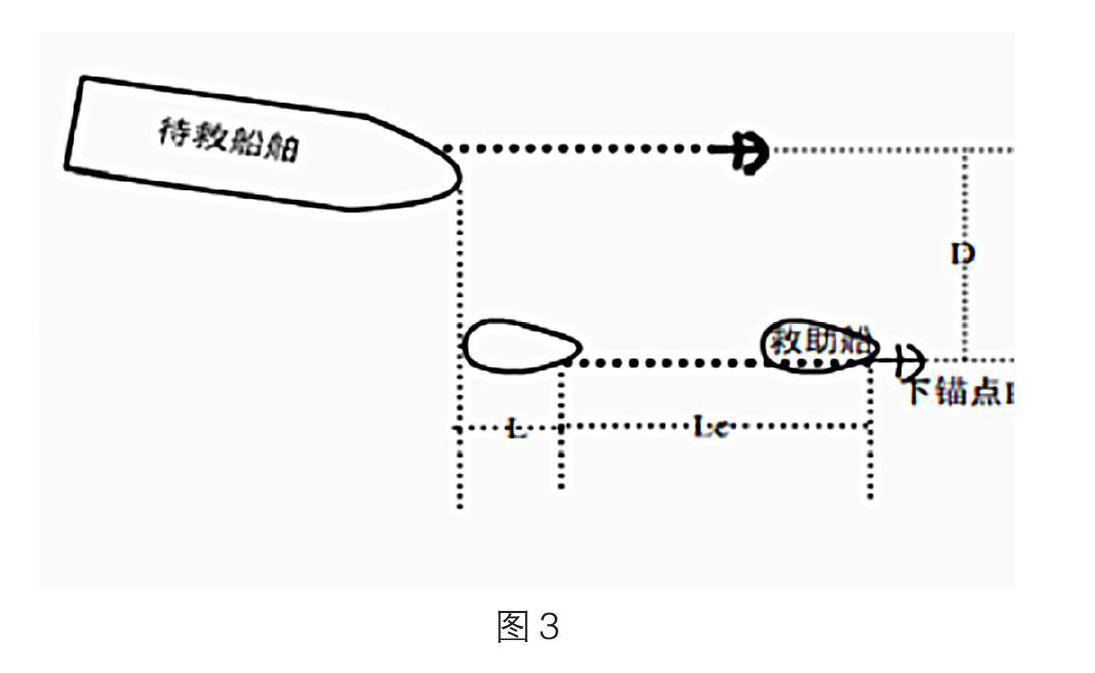
救助船舶可通过待救船舶的锚链长度和出链方向,粗略估算被拖船舶的锚位,并在雷达上做好标示作为参考点。同时救助船舶可根据海区水深情况、自身锚链储量,预计需要出链长度。当行驶抵预定位置时及时抛锚入点。如图3:
下锚点P应满足以待救船舶船首为基点(可在雷达上观测),加上L(救助船舶天线到船尾的距离)和出链长度Lc,并满足横向距离D(通常为30~40米左右)。并在雷达上标示,船舶按照标示点下锚。
3 选择驶向下锚点路径
为了防止风流压的影响,救助船舶应尽可能在待救船的下风侧以平行于其锚链的方向慢速或微速行驶,两船间平行时的距离约可保持在20~30米 ,行驶中应充分考虑风流对船位的影响及待救船锚泊偏荡程度,当救助船尾部超过待接拖船的船首后,可利用雷达观测与待救船的实际距离,驶向雷达上已经标示的下锚位置。
4 选择适当的退速靠近待救船舶
抛锚后应及时送出锚链,使船舶按自然漂移方式微速后退,及时观察锚链及锚抓底情况,让锚切实抛住,防止因走锚而发生与待救船舶碰撞的险情。如发现后退速度过快,与送出锚链速度不成比例,可视作走锚,应重新抛锚。
5 调整航向,缩短横向距离
当救助船尾部和待救船首部齐平时,固定锚链,此时救助船已下锚固定船位,船尾距待救船的船首部不会太远。如果需要调整两船间的横向距离,采取压舵的方法,使船横向移动,到达合适的距离时可先带一条系缆固定两船距离,就可以进行接拖系缆的作业了。如果带缆尚有困难,可用车舵配合进行操作,使尾部更接近待救船的首部,以利接拖操作,因为此时拖轮已有锚固定,操纵比较易于控制。
三、结语
海上救助中,船员对锚泊船实施接拖带缆时,通常采用动态跟踪带缆的模式,甚至在日常的训练中也大多采用此种方式,本文通过对锚泊船舶接拖方式的优缺点和抛锚带缆方式的介绍,剖析了FPP船舶抛锚带缆接拖方式优于动态跟踪稳定带缆方式的基本原理及操作方法,可以有效规避船舶在动态稳定期间容易发生船舶碰撞、缠绕车叶等风险,为甲板人员提供良好的作业环境。此外尽管CPP船舶的动态跟踪能力较强,但是抛锚带缆接拖方式也是CPP船舶接拖锚泊船舶时一种不错的选择。
参考文献
[1]中国船级社《海上拖航指南》.1997版
[2]《海上救助使用指导手册》.人民交通出版社
[3]陆志材.《船舶操纵》.大连海事大学出版社.2000版
