一类含间隙碰撞振动系统混沌运动的RBF神经网络控制
卫晓娟 李宁洲 张惠 丁旺才

摘要: 应用基于RBF神经网络的智能优化控制方法研究一类含间隙碰撞振动系统混沌运动的控制。基于RBF神经网络设计混沌控制器,利用混沌控制器输出小扰动施加于系统的可控参数,将混沌运动控制为预期的规则运动,同时将自适应混合引力搜索算法与RBF神经网络相结合,利用自适应混合引力搜索算法收敛速度快和全局寻优能力强的优势,优化混沌控制器的参数,避免了控制器参数选择的盲目性和主观性,提高了控制器的性能。该方法不需要被控系统的精确数学模型,适用于系统模型未知而仅获得实验数据的情况。
关键词: 非线性振动; 碰撞振动; 混沌控制; RBF神经网络; AHGSA算法
中图分类号: O322; TH113.1; TP183 文献标志码:A文章编号1004-4523(2018)02-0336-07
DOI:10.16385/j.cnki.issn.1004-4523.2018.02.018
引言
实际应用中,由于设计、制造或装配误差等因素影响,机械系统中各零部件间会存在间隙,导致在外部激励作用下零部件间将出现碰撞振动现象。由于碰撞的存在,碰撞振动系统具有非光滑和强非线性特性,其复杂的不稳定动力学行为(如混沌行为)不仅会引起噪声或机械部件磨损,甚至会危及系统运行安全(例如由于轮轨间隙的存在,当机车车辆运行速度高于机车车辆蛇行运动的临界速度时,随着运行速度的提高,蛇行运动将渐趋恶化,各刚体的振动位移变得越来越大而最终出现分岔现象并伴有混沌运动状态,轮轨间会产生剧烈碰撞而导致机车车辆运行性能恶化,不仅可能损伤轮对及线路,甚至可能造成脱轨事故[1-2])。
因此,鉴于工程实际中的需求,对碰撞振动系统的混沌运动进行控制,以获得该类系统的稳定动力学行为,减少由其不稳定动力学行为(如混沌运动)所引起的不必要的损失并延长机械设备的使用寿命是非常必要且具有实际工程价值的。
近年来,研究者们关于碰撞振动系统混沌运动控制策略和方法的研究取得了相应的成果。文献[3-4] 提出了一类单自由度碰撞振动系统混沌运动的状态变量预测反馈控制策略及非线性延迟反馈控制策略;文献[5]提出了碰撞振动系统的参数自调节混沌控制策略;文献[6]提出了基于反馈控制思想的一类单自由度碰撞振子位置控制策略;文献[7]将OGY方法应用于一类单自由度碰撞振动系统混沌运动的控制中;文献[8]基于阻尼控制思想实现了一类单自由度碰撞振动系统混沌运动的控制,文献[9]基于反馈控制思想实现了不对称双边约束下两自由度碰撞振动系统的位置控制。
然而既有的多数碰撞振动系统混沌控制方法都需要获知系统模型信息,在受控系统模型未知或存在不确定性时将很难适用。但是工程实际中,由于混沌系统的复杂性,系统的解析模型往往是未知的或是难以精确得到的,因此,研究并提出不依赖于受控对象精确数学模型,仅利用系统的输入/输出数据进行混沌控制的控制策略和方法,具有重要的理论与现实意义。
将智能控制方法与智能计算方法相结合而形成的智能优化控制方法[10],由于不依赖于受控对象精确数学模型,且控制参数可利用智能计算方法自动优选,所以很适于解决难以建立受控对象精确数学模型的控制问题。但将智能优化控制方法引入碰撞振动系统混沌控制领域还未发现有相关文献,为了弥补现有碰撞振动系统混沌控制方法的不足,本文针对一类含间隙碰撞振动系统混沌控制问题,提出一种基于AHGSA-RBFNN的混沌控制策略,采用不依赖于受控对象精确数学模型的RBF神经网络设计混沌控制器,并采用自适应混合引力搜索算法[11](简称AHGSA算法)优化选择控制器的参数(即隐层节点中心、中心宽度、连接隐层和输出层的权值),通过给系统可控参数施加一个小扰动量,达到使系统产生预期规则运动的目的。该方法无需了解系统精确数学模型及不动点的位置等先验知识,实现简单。仿真结果也表明该方法具有良好的控制效果。
第2期卫晓娟,等: 一类含间隙碰撞振动系统混沌运动的RBF神经网络控制振 动 工 程 学 报第31卷1系统力学模型及混沌运动
本文研究含间隙碰撞振动系统混沌运动的控制,图1所示为一类单自由度含间隙碰撞振动系统的典型代表。质量块的质量用M表示,其位移用X表示,质量块与左侧刚性约束之间由刚度为K的线性弹簧和阻尼系数为C的线性阻尼器相连,当质量块M处于平衡位置时,其与右侧刚性约束的间隙为B。作用在質量块上的简谐激振力为Fsin(ΩT+τ)。
图1单自由度含间隙碰撞振动系统的力学模型
Fig.1The mechanical model of a single-degree-of-freedom vibro-impact system with clearance
若碰撞持续时间忽略不计,则图1所示系统运动微分方程为M+C+KX=Fsin(ΩT+τ), X+=-R-, X=B(1)式中,和X分别为质量块M的加速度、速度和位移;M,C,K分别为质量块M的质量、线性阻尼器的阻尼和线性弹簧的刚度;-,+分别为质量块M与右侧刚性约束碰撞前后的瞬时速度;R为恢复系数。
不失一般性,引入无量纲量x=XKF, ζ=C2MK, ω=ΩMK, t=TKM, b=BKF,对式(1)进行无量纲变换,得+2ζ+x=sin(ωt+τ), x+=-R-, x=b (2)式中-,+分别为质量块M与右侧刚性约束碰撞前后的瞬时速度。
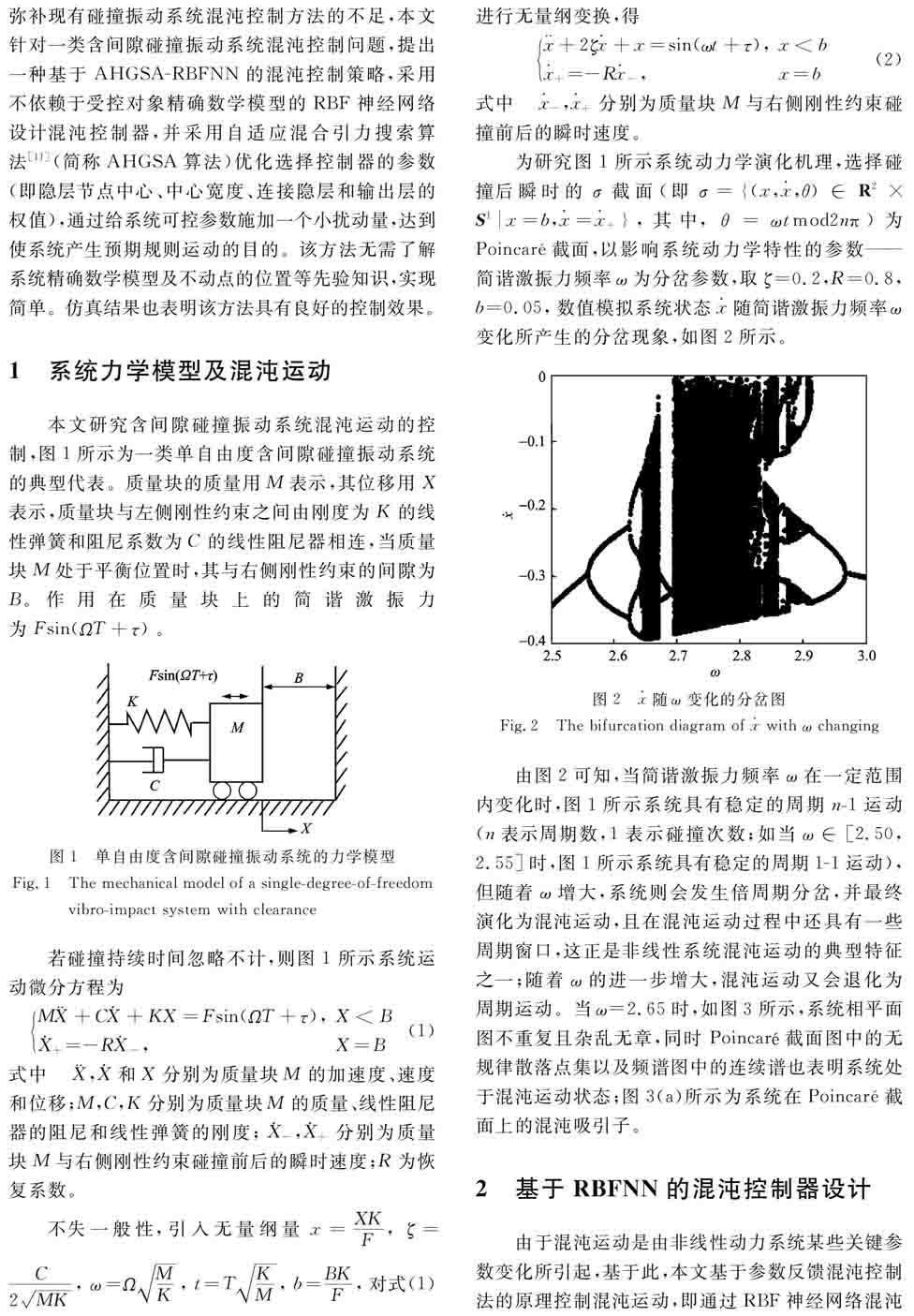
为研究图1所示系统动力学演化机理,选择碰撞后瞬时的σ截面(即σ={(x,,θ)∈R2×S1x=b,=+},其中,θ=ωtmod2nπ)为Poincaré截面,以影响系统动力学特性的参数——简谐激振力频率ω为分岔参数,取ζ=0.2,R=0.8,b=0.05,数值模拟系统状态随简谐激振力频率ω变化所产生的分岔现象,如图2所示。
图2随ω变化的分岔图
Fig.2The bifurcation diagram of with ω changing
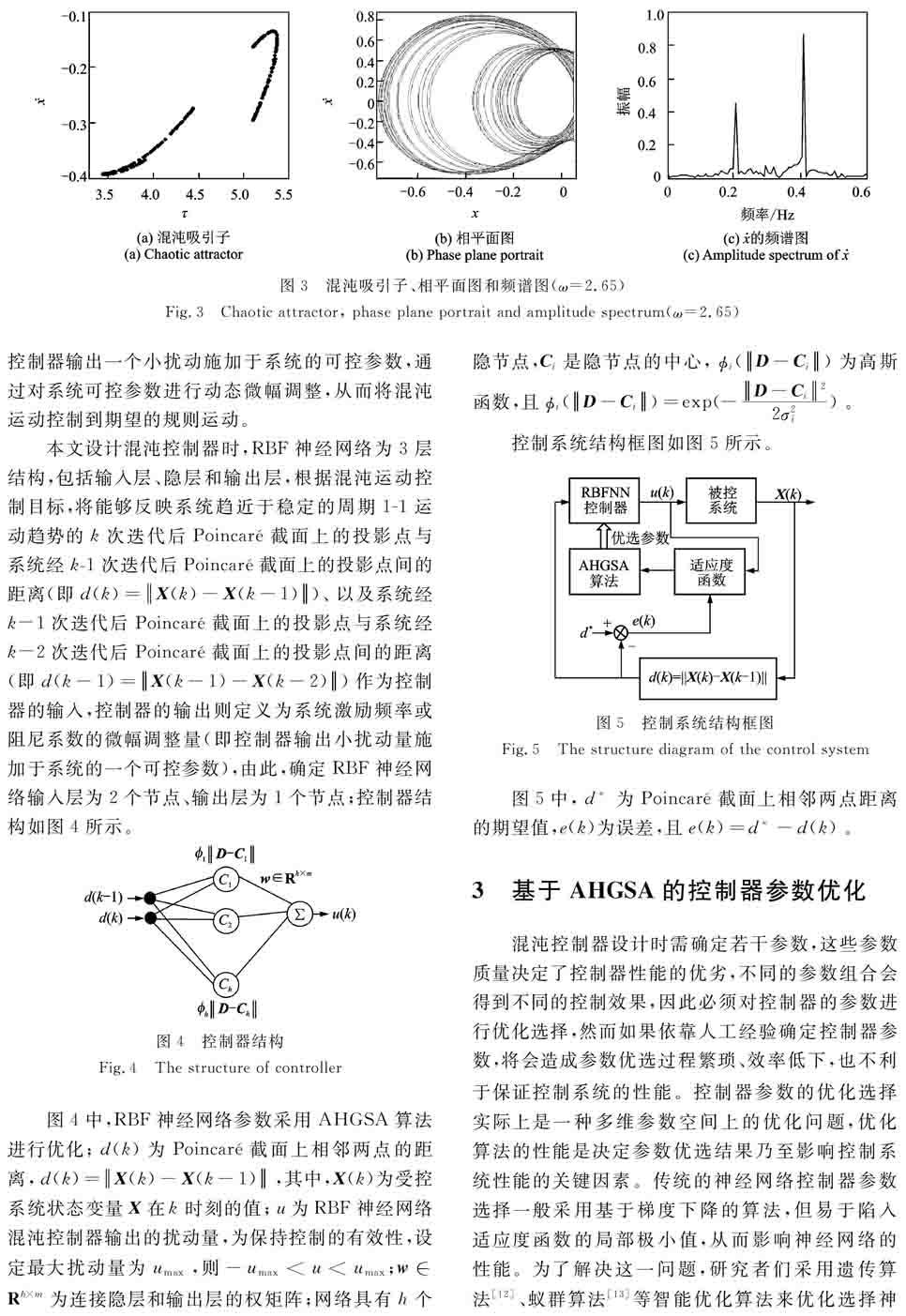
由图2可知,当简谐激振力频率ω在一定范围内变化时,图1所示系统具有稳定的周期n-1运动(n表示周期数,1表示碰撞次数;如当ω∈[2.50,2.55] 时,图1所示系统具有稳定的周期1-1运动),但随着ω增大,系统则会发生倍周期分岔,并最终演化为混沌运动,且在混沌运动过程中还具有一些周期窗口,这正是非线性系统混沌运动的典型特征之一;随着ω的进一步增大,混沌运动又会退化为周期运动。当ω=2.65时,如图3所示,系统相平面图不重复且杂乱无章,同时 Poincar截面图中的无规律散落点集以及频谱图中的连续谱也表明系统处于混沌运动状态;图3(a)所示为系统在Poincaré截面上的混沌吸引子。图3混沌吸引子、相平面图和频谱图(ω=2.65)
Fig.3Chaotic attractor, phase plane portrait and amplitude spectrum(ω=2.65)
2基于RBFNN的混沌控制器设计
由于混沌运动是由非线性动力系统某些关键参数变化所引起,基于此,本文基于参数反馈混沌控制法的原理控制混沌运动,即通过RBF神经网络混沌控制器输出一个小扰动施加于系统的可控参数,通过对系统可控参数进行动态微幅调整,从而将混沌运动控制到期望的规则运动。
本文设计混沌控制器时,RBF神经网络为3层结构,包括输入层、隐层和输出层,根据混沌运动控制目标,将能够反映系统趋近于稳定的周期1-1运动趋势的k次迭代后Poincaré截面上的投影点与系统经k-1次迭代后Poincaré截面上的投影点间的距离(即d(k)=X(k)-X(k-1))、以及系统经k-1次迭代后Poincaré截面上的投影点与系统经k-2次迭代后Poincaré截面上的投影点间的距离(即d(k-1)=X(k-1)-X(k-2))作为控制器的输入,控制器的输出则定义为系统激励频率或阻尼系数的微幅调整量(即控制器输出小扰动量施加于系统的一个可控参数),由此,确定RBF神经网络输入层为2个节点、输出层为1个节点;控制器结构如图4所示。
图4控制器结构
Fig.4The structure of controller
图4中,RBF神经网络参数采用AHGSA算法进行优化;d(k)为Poincaré截面上相邻两点的距离, d(k)=X(k)-X(k-1),其中,X(k)为受控系统状态变量X在k时刻的值;u为RBF神经网络混沌控制器输出的扰动量,为保持控制的有效性,设定最大扰动量为umax,则-umax
图5控制系统结构框图
Fig.5The structure diagram of the control system
图5中,d*为Poincaré截面上相邻两点距离的期望值,e(k)为误差,且e(k)=d*-d(k)。
3基于AHGSA的控制器参数优化
混沌控制器设计时需确定若干参数,这些参数质量决定了控制器性能的优劣,不同的参数组合会得到不同的控制效果,因此必须对控制器的参数进行优化选择,然而如果依靠人工经验确定控制器参数,将会造成参数优选过程繁琐、效率低下,也不利于保证控制系统的性能。控制器参数的优化选择实际上是一种多维参数空间上的优化问题,优化算法的性能是决定参数优选结果乃至影响控制系统性能的关键因素。传统的神经网络控制器参数选择一般采用基于梯度下降的算法,但易于陷入适应度函数的局部极小值,从而影响神经网络的性能。为了解决这一问题,研究者们采用遗传算法[12]、蚁群算法[13]等智能优化算法来优化选择神经网络的参数,并取得了一定的成效。但是GA需要进行复制、交叉、变异操作,其算法结构相对复杂,而ACO中的控制参数相对较多,容易产生早熟收敛现象。
AHGSA算法是在GSA算法[14]的基础上经过改进而提出的,其既具有GSA算法所需控制参数少、结构简单的特点,又利用了混沌运动的典型特征:遍历性和随机性,采用混沌序列初始化种群,增强了粒子搜索初期的遍历性,并在粒子搜索过程中构造变异算子,對速度和位置进行变异操作,发挥了全局最优解对粒子搜索运动的引导作用;同时,又依据粒子的性能,对其进化过程中的控制参数(即万有引力系数)进行自适应调整,从而克服了GSA算法全局探索能力较强而局部开发能力较差的弱点,提高了算法的整体寻优效率。因此本文采用AHGSA以提高碰撞振动系统混沌运动控制中待优化问题的求解效率。
3.1适应度函数的构建
适应度函数是用来衡量基于RBF神经网络所设计的混沌控制器对被控系统的控制能力的。目标是找到这样一个网络,能使被控含间隙碰撞振动系统由混沌状态最终趋于期望的规则运动。适应度函数的构建不仅需考虑控制系统的快速性、稳定性及准确性,同时也应考虑控制能量问题。
假设粒子群规模为n,粒子i的位置用m维向量i表示,m=s×h+2h(s为混沌控制器输入变量的个数,h为RBF神经网络隐层节点数),则粒子群的位置可以用矩阵n×m表示,根据碰撞振动系统混沌运动控制目标,本文选定Poincaré截面上相邻两点的距离d(k)=X(k)-X(k-1)作为判断依据,构建控制器参数优化选择时所应满足的适应度函数如下f(i)=λ1∑Lk=1d*-X(k)-X(k-1)·
ln(1η)+λ2∑Lk=1u(k)(3)式中X(k)为受控系统状态变量X在k时刻的值; u(k)为k时刻的控制输入;d*为Poincaré截面上相邻两点距离的期望值;η为(0,1)区间上均匀分布的随机数;λ1, λ2为相对权重;L为输入/输出数据序列长度。
3.2基于AHGSA的控制器参数优化
采用AHGSA算法使式(3)取得最小值的全局最优位置g即是RBF神经网络混沌控制器的最优参数w,σ和c,其具体优化步骤如下:
Step1:利用混沌序列初始化粒子位置,随机产生粒子的初始速度;
Step2:按式(3)计算粒子的适应值,确定个体最优位置和群体最优位置;
Step3:更新粒子的速度和位置;
Step4:按式(3)计算各粒子的适应值,更新个体最优位置和群体最优位置;
Step5:判斷算法是否满足终止条件,满足则搜索停止,输出全局最优位置对应的混沌控制器的参数解;否则,转向Step3。
4仿真研究
采用本文所提出的混沌控制方法对图3(a)所示混沌吸引子进行控制仿真,控制方法中没有用到系统的模型信息,文中利用系统的模型仅仅为了产生系统的输入/输出数据,并不用其进行控制器的设计。
选用高斯RBF神经网络进行混沌控制器设计,且经过对比分析发现:隐层节点少于5个时,由于控制器的非线性映射能力弱,仿真分析发现无法完成有效混沌控制,而当隐层节点增多后,控制器的非线性映射能力增强,智能算法优选到适当的控制器参数则控制效果会变得更好;但随着隐层节点进一步增多,控制器结构也会变得相较更为复杂,需要确定的控制器参数也会成倍数增多,智能算法要搜寻到合适的控制器参数也变得相对更为困难,算法的寻优效率随之相应降低;根据神经网络隐层节点数的基本确定原则(即:满足控制系统性能要求的前提下取尽可能紧凑的网络结构,也就是取尽可能少的隐层节点数),所以选择能够完成有效混沌控制的最少隐层节点数,即将网络隐层节点选定为5个。AHGSA算法的参数设置为:种群规模为30,最大迭代次数为100,G0=130,α=18,等比系数p=0.96。针对系统可控参数ω施加微小扰动,以抑制系统的混沌运动,使系统趋于稳定的周期运动。为了更清楚地显示混沌运动控制效果,系统迭代400次时对混沌运动施加控制。
图6为将混沌运动控制为周期1-1运动的仿真结果图,展现了基于AHGSA-RBFNN的混沌运动控制效果。采用AHGSA算法优化后的RBF神经网络参数如表1所示。图6(a)~6(c)是系统的受控周期1轨道(a-)、相平面图(b)及频谱图(c)。
图6系统的受控周期1-1运动
Fig.6Controlled period 1-1 motion of the system
由图6可知,混沌运动能够很快地被控制为周期1-1运动,相图为1条封闭曲线,频谱图出现1个峰值。表1RBF神经网络参数(周期1-1)
Tab.1Parameters of RBFNN(period 1-1)
隐层节点中心中心宽度连接隐层和输
出层的权值(-0.4634,0.0615)0.1553-0.1295(0.0145,0.4333)0.49590.6096(0.3884,-0.1873)0.54800.6572(-0.4650,0.9533)0.97531.8719(0.1798,-0.4595)0.4057-0.7667
图7为将混沌运动控制为周期2-2运动的仿真结果图。采用AHGSA算法优化后的RBF神经网络参数如表2所示。
图7(a)~7(c)是系统的受控周期2轨道(a-)、相平面图(b)及频谱图(c)。
由图7可知,混沌运动能够很快地被控制为周期2-2运动,相图为2条封闭曲线,频谱图出现2个明显峰值。
图7系统的受控周期2-2运动
Fig.7Controlled period 2-2 motion of the system
表2RBF神经网络参数(周期2-2)
Tab.2Parameters of RBFNN(period 2-2)
隐层节点中心中心宽度连接隐层和输
出层的权值(-0.5571,-0.0145)0.1551-0.4048(-0.4343,-0.2695)0.22701.4516(0.6568,-0.2486)0.16571.1380(-0.4287,-0.0286)0.40520.1679(-0.3259,-0.5974)0.3730-1.1044
由上述仿真结果可见,利用本文方法能够很好地实现对图1所示系统混沌运动的有效控制,而且预期目标不仅可为周期1不动点,也可以设定为其他的周期轨道。但是出于篇幅的考虑,这里只给出部分n-p周期轨道的控制效果图,其余周期轨道的控制效果不再赘述。
5结论
本文利用高斯RBF神经网络不依赖被控对象精确数学模型的优势和AHGSA算法优良的全局寻优性能,提出了一类含间隙碰撞振动系统混沌运动的RBF神经网络控制策略,以解决被控系统模型难以精确得到及无法获得被控系统确切的动力学信息(如不动点位置等信息)时的混沌运动控制问题。仿真结果表明:本文所提出的控制方法是有效的、可行的。实施混沌运动控制时,在所建立的适应度函数引导下,AHGSA算法可以对混沌控制器的参数进行有效地自动调节,相应地使得所设计的混沌控制器能够很好地达到控制要求,针对不同的预期目标,均能在很短的时间内搜索到并稳定在相应的目标周期轨道上,同时也降低了控制器设计时对人类干预的依赖。本文所提控制方法不依赖被控系统精确数学模型,无需了解被控系统确切的动力学信息(如不动点位置等),易于实现,能够适用于动力学模型未知而仅获得实验数据的情况。
参考文献:
[1]丁旺才,谢建华,王俊涛. 考虑轮轨碰撞的转向架蛇行振动的非线性分析[J]. 兰州理工大学学报,2004,30(1):45—49.
DING Wang-cai,XIE Jian-hua,WANG Jun-tao. Nonlinear analysis of hunting vibration of truck due to wheel-rail impact[J]. Journal of Lanzhou University of Technology,2004,30(1):45—49.
[2]高学军,李映辉,高庆. 高速客车蛇行运动稳定性与分岔研究[J]. 动力学与控制学报,2008,6(3):202—207.
GAO Xue-jun,LI Ying-hui,GAO Qing. Hunting stability and bifurcation of high-speed passenger coach[J]. Journal of Dynamics and Control,2008,6(3):202—207.
[3]丁旺才,马永靖,王靖岳. 碰撞振动系统的状态预测反馈控制[J]. 振动工程学报,2007,20(6):589—593.
DING Wang-cai,MA Yong-jing,WANG Jing-yue. Feedback control of a vibro-impact system by states prediction[J]. Journal of Vibration Engineering,2007,20(6):589—593.
[4]张庆爽,丁旺才,孙闯. 一类单自由度非光滑系统混沌运动的延迟反馈控制[J]. 振动与冲击,2008,27(1):155—158.
ZHANG Qing-shuang,DING WANG-cai,SUN Chuang. Delayed feedback control of chaos in a single DOF non-smooth system[J]. Journal of Vibration and Shock,2008,27(1):155—158.
[5]马永靖,丁旺才,杨小刚. 碰撞振动系统的参数自调节混沌控制[J]. 振动与冲击,2007,26(1):24—26.
MA Ying-jing,DING WANG-cai,YANG Xiao-gang. Chaos control of a vibro-impact system with parameter adjustment[J]. Journal of Vibration and Shock,2007,26(1):24—26.
[6]June-Yule Lee,Jun-Juh Yan. Control of impact oscillator[J]. Chaos Solitons and Fractals,2006,28(1):136—142.
[7]王子俊. 利用OGY方法控制單自由度碰撞振动系统的混沌行为[D]. 成都:西南交通大学,2013:20—32.
[8]Silvio L T de Souza,Ibere L Caldas. Controlling chaotic orbits in mechanical system with impacts[J]. Chaos Solitons and Fractals,2004,19(1):171—178.
[9]刘艳云,徐伟,黄冬梅,等. 双边约束的多自由度碰撞振动系统的控制方法[J]. 火力与指挥控制,2013,38(11):15—18.
LIU Yan-yun,XU Wei,HUANG Dong-mei,et al. Dynamical analysis of a multi-degree-of-freedom vibro-impact system under position control law[J]. Fire Control & Command Control,2013,38(11):15—18.
[10]辛斌,陈杰,彭志红. 智能优化控制:概述与展望[J]. 自动化学报,2013,39(11):1831—1848.
XIN Bin,CHEN Jie,PENG Zhi-hong. Intelligent optimized control: overview and prospect[J]. Acta Automatic Sinica,2013,39(11):1831—1848.
[11]卫晓娟,丁旺才,李宁洲,等. 基于引力搜索RBF神经网络的机车齿轮箱故障诊断[J]. 铁道学报,2016,38(2):19—26.
WEI Xiao-juan,DING Wang-cai,LI Ning-zhou. Fault diagnosis of locomotive gearbox based on gravitational search RBF neural network[J]. Journal of the China Railway Society,2016,38(2):19—26.
[12]苗森春,杨军虎,王晓晖,等. 基于神经网络-遗传算法的液力透平叶片型线优化[J]. 航空动力学报,2015,30(8):1918—1925.
MIAO Sen-chun,YANG Jun-hu,WANG Xiao-hui,et al. Blade pattern optimization of the hydraulic turbine based on neural network and genetic algorithm[J]. Journal of Aerospace Power,2015,30(8):1918—1925.
[13]王秋平,馬春林,肖玲玲,等. 基于蚁群算法-BP神经网络的主蒸汽温度控制系统仿真研究[J].热力发电,2013,42(11):64—68.
WANG Qiu-ping,MA Chun-lin,XIAO Ling-ling,et al. Main steam temperature control based on ant colony optimization algorithm and bp neural network[J]. Thermal Power Generation,2013,42(11):64—68.
[14]RASHEDIE,NEZAMABADI-POUR H,SARYAZDIS.GSA:a gravitational search algorithm[J]. Information Sciences,2009,179(13):2232—2248.
Chaos control of a vibro-impact system with clearance based
on RBF neural networkWEI Xiao-juan, LI Ning-zhou, ZHANG Hui, DING Wang-cai(School of Mechatronic Engineering, Lanzhou Jiaotong University, Lanzhou 730070, China)
Abstract: By using intelligent optimization control method based on RBF neural network, the chaotic motion control of a vibro-impact system with clearance is studied in this paper. The chaos controller designed based on RBF neural network is used to output a small perturbation to adjust the controllable parameter of the vibro-impact system. Thus, the chaotic motion is controlled to the expected regular motion. At the same time, adaptive hybrid gravitational search algorithm (AHGSA) is combined with RBF neural network. By using the advantages of AHGSA algorithm with high convergence speed and global optimization ability, the parameters of chaos controller are optimized so that the blindness and subjectivity of the parameters selection of the chaos controller are avoided, and the performance of the chaos controller is improved. The proposed method in this paper does not need the exact mathematical model of the controlled system, so it is suitable for the cases where the exact mathematical model of the controlled system is unknown and only the experimental data can be obtained.
Key words: nonlinear vibration; vibro-impact; chaos control; RBF neural network; adaptive hybrid gravitational search algorithm
摘要: 应用基于RBF神经网络的智能优化控制方法研究一类含间隙碰撞振动系统混沌运动的控制。基于RBF神经网络设计混沌控制器,利用混沌控制器输出小扰动施加于系统的可控参数,将混沌运动控制为预期的规则运动,同时将自适应混合引力搜索算法与RBF神经网络相结合,利用自适应混合引力搜索算法收敛速度快和全局寻优能力强的优势,优化混沌控制器的参数,避免了控制器参数选择的盲目性和主观性,提高了控制器的性能。该方法不需要被控系统的精确数学模型,适用于系统模型未知而仅获得实验数据的情况。
关键词: 非线性振动; 碰撞振动; 混沌控制; RBF神经网络; AHGSA算法
中图分类号: O322; TH113.1; TP183 文献标志码:A文章编号1004-4523(2018)02-0336-07
DOI:10.16385/j.cnki.issn.1004-4523.2018.02.018
引言
实际应用中,由于设计、制造或装配误差等因素影响,机械系统中各零部件间会存在间隙,导致在外部激励作用下零部件间将出现碰撞振动现象。由于碰撞的存在,碰撞振动系统具有非光滑和强非线性特性,其复杂的不稳定动力学行为(如混沌行为)不仅会引起噪声或机械部件磨损,甚至会危及系统运行安全(例如由于轮轨间隙的存在,当机车车辆运行速度高于机车车辆蛇行运动的临界速度时,随着运行速度的提高,蛇行运动将渐趋恶化,各刚体的振动位移变得越来越大而最终出现分岔现象并伴有混沌运动状态,轮轨间会产生剧烈碰撞而导致机车车辆运行性能恶化,不仅可能损伤轮对及线路,甚至可能造成脱轨事故[1-2])。
因此,鉴于工程实际中的需求,对碰撞振动系统的混沌运动进行控制,以获得该类系统的稳定动力学行为,减少由其不稳定动力学行为(如混沌运动)所引起的不必要的损失并延长机械设备的使用寿命是非常必要且具有实际工程价值的。
近年来,研究者们关于碰撞振动系统混沌运动控制策略和方法的研究取得了相应的成果。文献[3-4] 提出了一类单自由度碰撞振动系统混沌运动的状态变量预测反馈控制策略及非线性延迟反馈控制策略;文献[5]提出了碰撞振动系统的参数自调节混沌控制策略;文献[6]提出了基于反馈控制思想的一类单自由度碰撞振子位置控制策略;文献[7]将OGY方法应用于一类单自由度碰撞振动系统混沌运动的控制中;文献[8]基于阻尼控制思想实现了一类单自由度碰撞振动系统混沌运动的控制,文献[9]基于反馈控制思想实现了不对称双边约束下两自由度碰撞振动系统的位置控制。
然而既有的多数碰撞振动系统混沌控制方法都需要获知系统模型信息,在受控系统模型未知或存在不确定性时将很难适用。但是工程实际中,由于混沌系统的复杂性,系统的解析模型往往是未知的或是难以精确得到的,因此,研究并提出不依赖于受控对象精确数学模型,仅利用系统的输入/输出数据进行混沌控制的控制策略和方法,具有重要的理论与现实意义。
将智能控制方法与智能计算方法相结合而形成的智能优化控制方法[10],由于不依赖于受控对象精确数学模型,且控制参数可利用智能计算方法自动优选,所以很适于解决难以建立受控对象精确数学模型的控制问题。但将智能优化控制方法引入碰撞振动系统混沌控制领域还未发现有相关文献,为了弥补现有碰撞振动系统混沌控制方法的不足,本文针对一类含间隙碰撞振动系统混沌控制问题,提出一种基于AHGSA-RBFNN的混沌控制策略,采用不依赖于受控对象精确数学模型的RBF神经网络设计混沌控制器,并采用自适应混合引力搜索算法[11](简称AHGSA算法)优化选择控制器的参数(即隐层节点中心、中心宽度、连接隐层和输出层的权值),通过给系统可控参数施加一个小扰动量,达到使系统产生预期规则运动的目的。该方法无需了解系统精确数学模型及不动点的位置等先验知识,实现简单。仿真结果也表明该方法具有良好的控制效果。
第2期卫晓娟,等: 一类含间隙碰撞振动系统混沌运动的RBF神经网络控制振 动 工 程 学 报第31卷1系统力学模型及混沌运动
本文研究含间隙碰撞振动系统混沌运动的控制,图1所示为一类单自由度含间隙碰撞振动系统的典型代表。质量块的质量用M表示,其位移用X表示,质量块与左侧刚性约束之间由刚度为K的线性弹簧和阻尼系数为C的线性阻尼器相连,当质量块M处于平衡位置时,其与右侧刚性约束的间隙为B。作用在質量块上的简谐激振力为Fsin(ΩT+τ)。
图1单自由度含间隙碰撞振动系统的力学模型
Fig.1The mechanical model of a single-degree-of-freedom vibro-impact system with clearance
若碰撞持续时间忽略不计,则图1所示系统运动微分方程为M+C+KX=Fsin(ΩT+τ), X+=-R-, X=B(1)式中,和X分别为质量块M的加速度、速度和位移;M,C,K分别为质量块M的质量、线性阻尼器的阻尼和线性弹簧的刚度;-,+分别为质量块M与右侧刚性约束碰撞前后的瞬时速度;R为恢复系数。
不失一般性,引入无量纲量x=XKF, ζ=C2MK, ω=ΩMK, t=TKM, b=BKF,对式(1)进行无量纲变换,得+2ζ+x=sin(ωt+τ), x+=-R-, x=b (2)式中-,+分别为质量块M与右侧刚性约束碰撞前后的瞬时速度。
为研究图1所示系统动力学演化机理,选择碰撞后瞬时的σ截面(即σ={(x,,θ)∈R2×S1x=b,=+},其中,θ=ωtmod2nπ)为Poincaré截面,以影响系统动力学特性的参数——简谐激振力频率ω为分岔参数,取ζ=0.2,R=0.8,b=0.05,数值模拟系统状态随简谐激振力频率ω变化所产生的分岔现象,如图2所示。
图2随ω变化的分岔图
Fig.2The bifurcation diagram of with ω changing
由图2可知,当简谐激振力频率ω在一定范围内变化时,图1所示系统具有稳定的周期n-1运动(n表示周期数,1表示碰撞次数;如当ω∈[2.50,2.55] 时,图1所示系统具有稳定的周期1-1运动),但随着ω增大,系统则会发生倍周期分岔,并最终演化为混沌运动,且在混沌运动过程中还具有一些周期窗口,这正是非线性系统混沌运动的典型特征之一;随着ω的进一步增大,混沌运动又会退化为周期运动。当ω=2.65时,如图3所示,系统相平面图不重复且杂乱无章,同时 Poincar截面图中的无规律散落点集以及频谱图中的连续谱也表明系统处于混沌运动状态;图3(a)所示为系统在Poincaré截面上的混沌吸引子。图3混沌吸引子、相平面图和频谱图(ω=2.65)
Fig.3Chaotic attractor, phase plane portrait and amplitude spectrum(ω=2.65)
2基于RBFNN的混沌控制器设计
由于混沌运动是由非线性动力系统某些关键参数变化所引起,基于此,本文基于参数反馈混沌控制法的原理控制混沌运动,即通过RBF神经网络混沌控制器输出一个小扰动施加于系统的可控参数,通过对系统可控参数进行动态微幅调整,从而将混沌运动控制到期望的规则运动。
本文设计混沌控制器时,RBF神经网络为3层结构,包括输入层、隐层和输出层,根据混沌运动控制目标,将能够反映系统趋近于稳定的周期1-1运动趋势的k次迭代后Poincaré截面上的投影点与系统经k-1次迭代后Poincaré截面上的投影点间的距离(即d(k)=X(k)-X(k-1))、以及系统经k-1次迭代后Poincaré截面上的投影点与系统经k-2次迭代后Poincaré截面上的投影点间的距离(即d(k-1)=X(k-1)-X(k-2))作为控制器的输入,控制器的输出则定义为系统激励频率或阻尼系数的微幅调整量(即控制器输出小扰动量施加于系统的一个可控参数),由此,确定RBF神经网络输入层为2个节点、输出层为1个节点;控制器结构如图4所示。
图4控制器结构
Fig.4The structure of controller
图4中,RBF神经网络参数采用AHGSA算法进行优化;d(k)为Poincaré截面上相邻两点的距离, d(k)=X(k)-X(k-1),其中,X(k)为受控系统状态变量X在k时刻的值;u为RBF神经网络混沌控制器输出的扰动量,为保持控制的有效性,设定最大扰动量为umax,则-umax
图5控制系统结构框图
Fig.5The structure diagram of the control system
图5中,d*为Poincaré截面上相邻两点距离的期望值,e(k)为误差,且e(k)=d*-d(k)。
3基于AHGSA的控制器参数优化
混沌控制器设计时需确定若干参数,这些参数质量决定了控制器性能的优劣,不同的参数组合会得到不同的控制效果,因此必须对控制器的参数进行优化选择,然而如果依靠人工经验确定控制器参数,将会造成参数优选过程繁琐、效率低下,也不利于保证控制系统的性能。控制器参数的优化选择实际上是一种多维参数空间上的优化问题,优化算法的性能是决定参数优选结果乃至影响控制系统性能的关键因素。传统的神经网络控制器参数选择一般采用基于梯度下降的算法,但易于陷入适应度函数的局部极小值,从而影响神经网络的性能。为了解决这一问题,研究者们采用遗传算法[12]、蚁群算法[13]等智能优化算法来优化选择神经网络的参数,并取得了一定的成效。但是GA需要进行复制、交叉、变异操作,其算法结构相对复杂,而ACO中的控制参数相对较多,容易产生早熟收敛现象。
AHGSA算法是在GSA算法[14]的基础上经过改进而提出的,其既具有GSA算法所需控制参数少、结构简单的特点,又利用了混沌运动的典型特征:遍历性和随机性,采用混沌序列初始化种群,增强了粒子搜索初期的遍历性,并在粒子搜索过程中构造变异算子,對速度和位置进行变异操作,发挥了全局最优解对粒子搜索运动的引导作用;同时,又依据粒子的性能,对其进化过程中的控制参数(即万有引力系数)进行自适应调整,从而克服了GSA算法全局探索能力较强而局部开发能力较差的弱点,提高了算法的整体寻优效率。因此本文采用AHGSA以提高碰撞振动系统混沌运动控制中待优化问题的求解效率。
3.1适应度函数的构建
适应度函数是用来衡量基于RBF神经网络所设计的混沌控制器对被控系统的控制能力的。目标是找到这样一个网络,能使被控含间隙碰撞振动系统由混沌状态最终趋于期望的规则运动。适应度函数的构建不仅需考虑控制系统的快速性、稳定性及准确性,同时也应考虑控制能量问题。
假设粒子群规模为n,粒子i的位置用m维向量i表示,m=s×h+2h(s为混沌控制器输入变量的个数,h为RBF神经网络隐层节点数),则粒子群的位置可以用矩阵n×m表示,根据碰撞振动系统混沌运动控制目标,本文选定Poincaré截面上相邻两点的距离d(k)=X(k)-X(k-1)作为判断依据,构建控制器参数优化选择时所应满足的适应度函数如下f(i)=λ1∑Lk=1d*-X(k)-X(k-1)·
ln(1η)+λ2∑Lk=1u(k)(3)式中X(k)为受控系统状态变量X在k时刻的值; u(k)为k时刻的控制输入;d*为Poincaré截面上相邻两点距离的期望值;η为(0,1)区间上均匀分布的随机数;λ1, λ2为相对权重;L为输入/输出数据序列长度。
3.2基于AHGSA的控制器参数优化
采用AHGSA算法使式(3)取得最小值的全局最优位置g即是RBF神经网络混沌控制器的最优参数w,σ和c,其具体优化步骤如下:
Step1:利用混沌序列初始化粒子位置,随机产生粒子的初始速度;
Step2:按式(3)计算粒子的适应值,确定个体最优位置和群体最优位置;
Step3:更新粒子的速度和位置;
Step4:按式(3)计算各粒子的适应值,更新个体最优位置和群体最优位置;
Step5:判斷算法是否满足终止条件,满足则搜索停止,输出全局最优位置对应的混沌控制器的参数解;否则,转向Step3。
4仿真研究
采用本文所提出的混沌控制方法对图3(a)所示混沌吸引子进行控制仿真,控制方法中没有用到系统的模型信息,文中利用系统的模型仅仅为了产生系统的输入/输出数据,并不用其进行控制器的设计。
选用高斯RBF神经网络进行混沌控制器设计,且经过对比分析发现:隐层节点少于5个时,由于控制器的非线性映射能力弱,仿真分析发现无法完成有效混沌控制,而当隐层节点增多后,控制器的非线性映射能力增强,智能算法优选到适当的控制器参数则控制效果会变得更好;但随着隐层节点进一步增多,控制器结构也会变得相较更为复杂,需要确定的控制器参数也会成倍数增多,智能算法要搜寻到合适的控制器参数也变得相对更为困难,算法的寻优效率随之相应降低;根据神经网络隐层节点数的基本确定原则(即:满足控制系统性能要求的前提下取尽可能紧凑的网络结构,也就是取尽可能少的隐层节点数),所以选择能够完成有效混沌控制的最少隐层节点数,即将网络隐层节点选定为5个。AHGSA算法的参数设置为:种群规模为30,最大迭代次数为100,G0=130,α=18,等比系数p=0.96。针对系统可控参数ω施加微小扰动,以抑制系统的混沌运动,使系统趋于稳定的周期运动。为了更清楚地显示混沌运动控制效果,系统迭代400次时对混沌运动施加控制。
图6为将混沌运动控制为周期1-1运动的仿真结果图,展现了基于AHGSA-RBFNN的混沌运动控制效果。采用AHGSA算法优化后的RBF神经网络参数如表1所示。图6(a)~6(c)是系统的受控周期1轨道(a-)、相平面图(b)及频谱图(c)。
图6系统的受控周期1-1运动
Fig.6Controlled period 1-1 motion of the system
由图6可知,混沌运动能够很快地被控制为周期1-1运动,相图为1条封闭曲线,频谱图出现1个峰值。表1RBF神经网络参数(周期1-1)
Tab.1Parameters of RBFNN(period 1-1)
隐层节点中心中心宽度连接隐层和输
出层的权值(-0.4634,0.0615)0.1553-0.1295(0.0145,0.4333)0.49590.6096(0.3884,-0.1873)0.54800.6572(-0.4650,0.9533)0.97531.8719(0.1798,-0.4595)0.4057-0.7667
图7为将混沌运动控制为周期2-2运动的仿真结果图。采用AHGSA算法优化后的RBF神经网络参数如表2所示。
图7(a)~7(c)是系统的受控周期2轨道(a-)、相平面图(b)及频谱图(c)。
由图7可知,混沌运动能够很快地被控制为周期2-2运动,相图为2条封闭曲线,频谱图出现2个明显峰值。
图7系统的受控周期2-2运动
Fig.7Controlled period 2-2 motion of the system
表2RBF神经网络参数(周期2-2)
Tab.2Parameters of RBFNN(period 2-2)
隐层节点中心中心宽度连接隐层和输
出层的权值(-0.5571,-0.0145)0.1551-0.4048(-0.4343,-0.2695)0.22701.4516(0.6568,-0.2486)0.16571.1380(-0.4287,-0.0286)0.40520.1679(-0.3259,-0.5974)0.3730-1.1044
由上述仿真结果可见,利用本文方法能够很好地实现对图1所示系统混沌运动的有效控制,而且预期目标不仅可为周期1不动点,也可以设定为其他的周期轨道。但是出于篇幅的考虑,这里只给出部分n-p周期轨道的控制效果图,其余周期轨道的控制效果不再赘述。
5结论
本文利用高斯RBF神经网络不依赖被控对象精确数学模型的优势和AHGSA算法优良的全局寻优性能,提出了一类含间隙碰撞振动系统混沌运动的RBF神经网络控制策略,以解决被控系统模型难以精确得到及无法获得被控系统确切的动力学信息(如不动点位置等信息)时的混沌运动控制问题。仿真结果表明:本文所提出的控制方法是有效的、可行的。实施混沌运动控制时,在所建立的适应度函数引导下,AHGSA算法可以对混沌控制器的参数进行有效地自动调节,相应地使得所设计的混沌控制器能够很好地达到控制要求,针对不同的预期目标,均能在很短的时间内搜索到并稳定在相应的目标周期轨道上,同时也降低了控制器设计时对人类干预的依赖。本文所提控制方法不依赖被控系统精确数学模型,无需了解被控系统确切的动力学信息(如不动点位置等),易于实现,能够适用于动力学模型未知而仅获得实验数据的情况。
参考文献:
[1]丁旺才,谢建华,王俊涛. 考虑轮轨碰撞的转向架蛇行振动的非线性分析[J]. 兰州理工大学学报,2004,30(1):45—49.
DING Wang-cai,XIE Jian-hua,WANG Jun-tao. Nonlinear analysis of hunting vibration of truck due to wheel-rail impact[J]. Journal of Lanzhou University of Technology,2004,30(1):45—49.
[2]高学军,李映辉,高庆. 高速客车蛇行运动稳定性与分岔研究[J]. 动力学与控制学报,2008,6(3):202—207.
GAO Xue-jun,LI Ying-hui,GAO Qing. Hunting stability and bifurcation of high-speed passenger coach[J]. Journal of Dynamics and Control,2008,6(3):202—207.
[3]丁旺才,马永靖,王靖岳. 碰撞振动系统的状态预测反馈控制[J]. 振动工程学报,2007,20(6):589—593.
DING Wang-cai,MA Yong-jing,WANG Jing-yue. Feedback control of a vibro-impact system by states prediction[J]. Journal of Vibration Engineering,2007,20(6):589—593.
[4]张庆爽,丁旺才,孙闯. 一类单自由度非光滑系统混沌运动的延迟反馈控制[J]. 振动与冲击,2008,27(1):155—158.
ZHANG Qing-shuang,DING WANG-cai,SUN Chuang. Delayed feedback control of chaos in a single DOF non-smooth system[J]. Journal of Vibration and Shock,2008,27(1):155—158.
[5]马永靖,丁旺才,杨小刚. 碰撞振动系统的参数自调节混沌控制[J]. 振动与冲击,2007,26(1):24—26.
MA Ying-jing,DING WANG-cai,YANG Xiao-gang. Chaos control of a vibro-impact system with parameter adjustment[J]. Journal of Vibration and Shock,2007,26(1):24—26.
[6]June-Yule Lee,Jun-Juh Yan. Control of impact oscillator[J]. Chaos Solitons and Fractals,2006,28(1):136—142.
[7]王子俊. 利用OGY方法控制單自由度碰撞振动系统的混沌行为[D]. 成都:西南交通大学,2013:20—32.
[8]Silvio L T de Souza,Ibere L Caldas. Controlling chaotic orbits in mechanical system with impacts[J]. Chaos Solitons and Fractals,2004,19(1):171—178.
[9]刘艳云,徐伟,黄冬梅,等. 双边约束的多自由度碰撞振动系统的控制方法[J]. 火力与指挥控制,2013,38(11):15—18.
LIU Yan-yun,XU Wei,HUANG Dong-mei,et al. Dynamical analysis of a multi-degree-of-freedom vibro-impact system under position control law[J]. Fire Control & Command Control,2013,38(11):15—18.
[10]辛斌,陈杰,彭志红. 智能优化控制:概述与展望[J]. 自动化学报,2013,39(11):1831—1848.
XIN Bin,CHEN Jie,PENG Zhi-hong. Intelligent optimized control: overview and prospect[J]. Acta Automatic Sinica,2013,39(11):1831—1848.
[11]卫晓娟,丁旺才,李宁洲,等. 基于引力搜索RBF神经网络的机车齿轮箱故障诊断[J]. 铁道学报,2016,38(2):19—26.
WEI Xiao-juan,DING Wang-cai,LI Ning-zhou. Fault diagnosis of locomotive gearbox based on gravitational search RBF neural network[J]. Journal of the China Railway Society,2016,38(2):19—26.
[12]苗森春,杨军虎,王晓晖,等. 基于神经网络-遗传算法的液力透平叶片型线优化[J]. 航空动力学报,2015,30(8):1918—1925.
MIAO Sen-chun,YANG Jun-hu,WANG Xiao-hui,et al. Blade pattern optimization of the hydraulic turbine based on neural network and genetic algorithm[J]. Journal of Aerospace Power,2015,30(8):1918—1925.
[13]王秋平,馬春林,肖玲玲,等. 基于蚁群算法-BP神经网络的主蒸汽温度控制系统仿真研究[J].热力发电,2013,42(11):64—68.
WANG Qiu-ping,MA Chun-lin,XIAO Ling-ling,et al. Main steam temperature control based on ant colony optimization algorithm and bp neural network[J]. Thermal Power Generation,2013,42(11):64—68.
[14]RASHEDIE,NEZAMABADI-POUR H,SARYAZDIS.GSA:a gravitational search algorithm[J]. Information Sciences,2009,179(13):2232—2248.
Chaos control of a vibro-impact system with clearance based
on RBF neural networkWEI Xiao-juan, LI Ning-zhou, ZHANG Hui, DING Wang-cai(School of Mechatronic Engineering, Lanzhou Jiaotong University, Lanzhou 730070, China)
Abstract: By using intelligent optimization control method based on RBF neural network, the chaotic motion control of a vibro-impact system with clearance is studied in this paper. The chaos controller designed based on RBF neural network is used to output a small perturbation to adjust the controllable parameter of the vibro-impact system. Thus, the chaotic motion is controlled to the expected regular motion. At the same time, adaptive hybrid gravitational search algorithm (AHGSA) is combined with RBF neural network. By using the advantages of AHGSA algorithm with high convergence speed and global optimization ability, the parameters of chaos controller are optimized so that the blindness and subjectivity of the parameters selection of the chaos controller are avoided, and the performance of the chaos controller is improved. The proposed method in this paper does not need the exact mathematical model of the controlled system, so it is suitable for the cases where the exact mathematical model of the controlled system is unknown and only the experimental data can be obtained.
Key words: nonlinear vibration; vibro-impact; chaos control; RBF neural network; adaptive hybrid gravitational search algorithm
