道路交通流参数无人机调查与识别方法研究
李士尧 鲁元博 裴玉龙
摘 要:为完善我国城市道路交通流参数调查的技术手段,提高数据统计分析的效率与精度,建立一种基于无人机航拍与图像处理的调查与识别方法。以大疆Phantom 4 Pro无人机与数码相机为基础,搭建无人机航拍平台,实现交通流图像的有效采集。在Visual Studio 2017集成编译环境下,依托OpenCV开源库,提出车辆识别跟踪与测距算法,通过图像裁剪排除干扰因子,应用cvtColor函数完成灰度化处理,采用中值滤波法实现图像的降噪;引入Canny算子检测车辆边缘,通过Otsu算法进行二值化处理,使用腐蚀操作消除干扰碎片;根据车辆长宽比与面积建立车辆外接矩形,并储存其中心点,提出基于双循环遍历与冒泡排序的车道标定算法,实现车距的提取与车流量、平均速度和车流密度等参数的测算。经检验,该方法调查与识别准确率能够达到95%以上,相比于传统调查方法,具有简单和便捷等优势。
关键词:航拍图像;OpenCV;滤波;交通流参数;测距
中图分类号:U 491 文献标识码:A 文章编号:1006-8023(2018)05-0072-06
Abstract: In order to improve the technical means of the investigation of traffic flow parameters of urban roads in China to improve the efficiency and accuracy of data statistics and analysis, an investigation and recognition method based on UAV aerial photography and image processing was built. Based on Dajiang Phantom 4 Pro UAV and digital camera, a UAV aerial platform was built, which realized the effective acquisition of traffic flow image. In the integrated compilation environment of Visual Studio 2017, relying on the open source library of OpenCV, a vehicle recognition, tracking and ranging algorithm was proposed. The algorithm eliminated interference factors through image cutting, invoked the function of cvtColor to finish grayscale processing, adopted median filter to realize image denoising, introduced the Canny operator to detect the edge of vehicle, realized binarization through the Otsu algorithm and eliminated interference fragments using corrosion operation. According to the vehicle aspect ratio and area, the vehicle external rectangles were established and the center points were stored. An algorithm of lane calibration was proposed based on double loop traversal and bubble sorting method, such that the vehicle distance could be extracted and the parameters of vehicle flow, average speed and vehicle density could be calculated. Through examination, the accuracy of this method can reach over 95%, which is more simple and convenient in comparing with the traditional method.
Keywords: Aerial image; OpenCV; filtering; traffic flow parameter; ranging
0 引言
城市道路交通流數据体现了交通工具在道路上的通行状态,对于制定未来城市交通规划以及城市发展战略等具有重要的意义[1]。随着我国城市规模的不断扩大,交通网络日趋复杂,加之机动车流量不断增多,道路交通流参数的调查与分析工作变得愈加重要。
城市道路交通流参数的获取方法分为直接检测和间接测算两种[2-3]。间接测算法在实际生活中已经有了较为成熟的模型[4],但直接检测法却往往不够简单和便捷,其主要分为固定检测和移动检测两类[5],固定检测法存在采集数据有限及设备维护不便等问题,因此,移动检测法已成为各国主要研究方向,德国的FCD系统[6]、英国的FVDS系统[7]、美国的ADVANCE系统[8]和日本的VICS系统[9]已经有了一定的应用,而我国在该领域尚处于起步阶段,对移动检测法的研究尚不成熟。
为丰富移动检测的技术方法,提高其调查效率与精度,本文提出了一种基于无人机航拍的道路交通流参数调查与识别方法,利用无人机采集图像,应用OpenCV开源库进行图像处理,实现了对城市道路交通流量、流向、速度和密度等参数的获取。
1 试验设计
试验以无人机航拍技术为依托,在考虑相机畸变、曝光不匀、图像抖动旋转等一系列问题的基础上,最终选择使用大疆Phantom 4 Pro无人机,搭载像素2 000万、焦距8.8 mm、等效135焦距24 mm、FOV84°、f2.8的相机,以保证航拍图像质量,满足图像后期处理的要求。数据处理模块,以OpenCV 3.2及Visual Studio 2017为编译环境,进行搭建,OpenCV是由Intel公司资助的开源计算机视觉库,可实现图像处理和计算机视觉方面的通用算法,如特征检测与跟踪和运动分析等[10]。
试验流程主要分为三个阶段,具体如图1所示。首先,利用无人机航拍技术,采集图像;其次,进行图像处理,识别车辆轮廓,绘制最小外接矩形,定位车道,将车辆轮廓按车道进行分离,以矩形中心点为基准绘制连线,测算距离;最后,整理图像数据,计算交通流参数。
为确保选择的道路具有代表性,且有足够的交通流量,选择了文昌街林大体育馆沿线、延兴路从文昌街至林兴街两个路段和延兴路与林兴街、征仪路与学府三道街两个交叉口作为试验地点。根据现场条件、图像处理和对比分析需求,经反复尝试,针对路段,最终选择了100、200 m两个高度进行试验;针对交叉口,则选择了200、300 m两个高度进行试验。在无人机调查的同时,采用传统的人工调查法进行同步记录,以备后期数据校验与分析。
2 车辆识别及测距算法
2.1 灰度化及去噪处理
采集的图像应首先进行裁剪处理,以尽可能排除周边无关干扰项(停车场和树林等),方便后续边缘检测。尔后,调用OpenCV中的转换函数cvtColor (Input Array src, Output Array dst, int code, int dstCn=0)进行灰度化处理[11],将航拍采集的RGB彩色图像转化为灰度图像。其中,src为输入彩色图像,dst为输出图像。
由于所有使用相机拍摄的图像都不可避免地含有噪声[12-14],因此在灰度化处理后,需要对其进行滤波去噪。通过对均值滤波、中值滤波及自适应滤波的比较与分析,本系统最终选择方法相对简单、易于实现,且能较好保护边界的中值滤波[15],内核大小为Size(3,3)。以200 m高度路段航拍图为例,处理效果如图2所示。
2.2 Canny算子边缘检测
在对图像进行边缘检测时,本系统分别采用了Roberts算子、Sobel算子及Canny算子三种稳定、快捷的方法进行试验[16]。其中,Roberts算子根据对角线像素点差值近似度检测边缘,但具有对噪声敏感、不利于进一步处理等缺点;Sobel算子计算相邻灰度加权差,在边缘达到极值处检测边缘,但对弱边缘不能保留;Canny算子是以高检测率、高定位性、单一性为原则的方法,也称变分法,其既能有效去噪又能使弱边缘得以保留,因此本系统使用Canny算子检测。
在图像边缘检测中,有2个关键点需注意[17]:①有效减少噪声的影响。②客观、正确地选取阈值。使用Canny算子检测边缘难度在于两个滞后阈值(高阈值和低阈值)的设置。当某一像素位置幅值高于高阈值,则变为边缘像素;当某一像素位置幅值低于低阈值,则省略该像素;当某一像素位置幅值位于两者之间时,该像素有且仅有在链接高阈值像素时保留下来。如果阈值选择不当,高阈值将导致边缘损失,低阈值将使得无关边缘增加;如果阈值选取得当,不仅可以减少噪声,而且对伪边缘的抑制有很好的效果[18]。经多次试验后发现,当高低阈值比为2 : 1至3 : 1时效果最佳。本系统选取150作为高阈值,50作为低阈值。以100 m高度路段航拍图像为例,处理效果如图3所示。
2.3 二值化及形态学处理
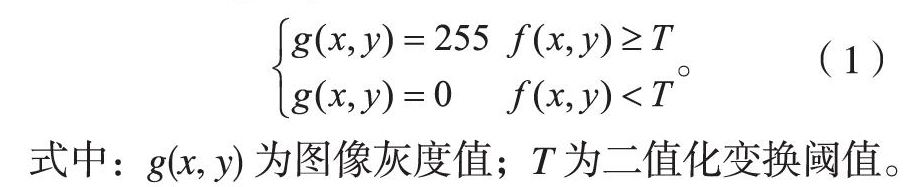
在对图像进行Canny算子边缘检测后,为了不让车辆处的密集边缘影响图像的进一步处理,需要对图像进行二次中值滤波去噪,本系统采用Size(50,50)大核中值滤波。为进一步进行阈值操作去噪,提高图像处理效率,需要对图像进行二值化处理。图像二值化公式为:
。 (1)
式中:g(x, y)为图像灰度值;T为二值化变换阈值。
由公式可知,二值化处理的关键在于阈值T的选取[19]。在进行阈值选取的方法中,Otsu方法具有较高的稳定性[20],其算法通过遍历灰度图像的每一个灰度空间,计算灰度的类间方差,不论图像的直方图中双峰是否明显,均能选取合适的阈值T[21],使两类像素点灰度值方差呈现最大化。以100 m高度路段航拍圖像为例,处理效果如图4所示。
由图4可知,在经过大核滤波和二值化处理后,图像依旧有车道边缘线以及车道污秽物等干扰因子存在,因此,需进一步做形态学处理。由于道路上的车辆呈横向排列,故采用x轴方向的腐蚀操作消除小碎片。腐蚀后效果如图5所示。
2.4 车辆识别
经过一系列图像处理后,车辆轮廓较为清晰,但由于车辆还具有边框不明显以及外界环境干扰等问题,同时考虑到筛选轮廓后车辆轮廓不便观察等因素,仍需做进一步处理。利用函数库中的findContours函数,选择整体平方误差(ISE)最小、且迭代时间最短的特征点集提取方法—最小值法[22],存储特征点,并画出车辆外接矩形。通过矩形面积及其长宽比筛选矩形,如图6所示。
2.5 车道标定及车距计算
在将图像中所有车辆用矩形圈出后,需要识别车道计算车距。目前,常用的方法是根据车道线模型的不同采用Hough变换和最小二乘法建立车道线方程[23-24]。由于Hough变换后,会出现多个噪点干扰轮廓区域,因此本文采用了一种新的算法,可以更加方便、快捷地识别车道。
考虑到本方法的使用地点为城市道路,因此对所提取出来的矩形进行中心点计算,并存在容器中,双循环遍历中心点,若两个矩形的中心点距大于矩形的宽度,则创建一个新的车道。
识别车道后,将同一车道的车辆按其x轴坐标进行冒泡排序[25],以存储的矩形中心点为中心,标记车头与车尾,计算车头与车尾中心点,绘制连线并测距。最后,将像素点折算为车距,如图7所示。
2.6 参数设置
经过上述一系列处理过程,对于100 m高度航拍图像中的车辆可以较好地识别并计算出车距。然而针对航拍高度较小或者更大的情况,则需要重新设置。首先是不同高度下二值化阈值的不同,需要遍历图像灰度空间的每个灰度,计算每一个灰度的分割阈值的类间方差,使类间方差达到最大。不同高度下,经过对图像灰度数据的遍历,发现效果最优阈值随着高度的增加呈现递增状态,需对环境变量对应设置不同的阈值。此外,在对车辆轮廓的筛选阶段,拍摄高度越大,车辆相对面积越小,长宽比小范围增大,需要前期设定合适范围。
3 交通流参数识别
为实现交通流参数的识别,参照其统计方法进行计算[26],具体如下:
(1)车流量。根据100 s内通过路段的机动车数量求得,为了防止数据重复,设立相应标准线,对比前后照片计数而得,记为F。
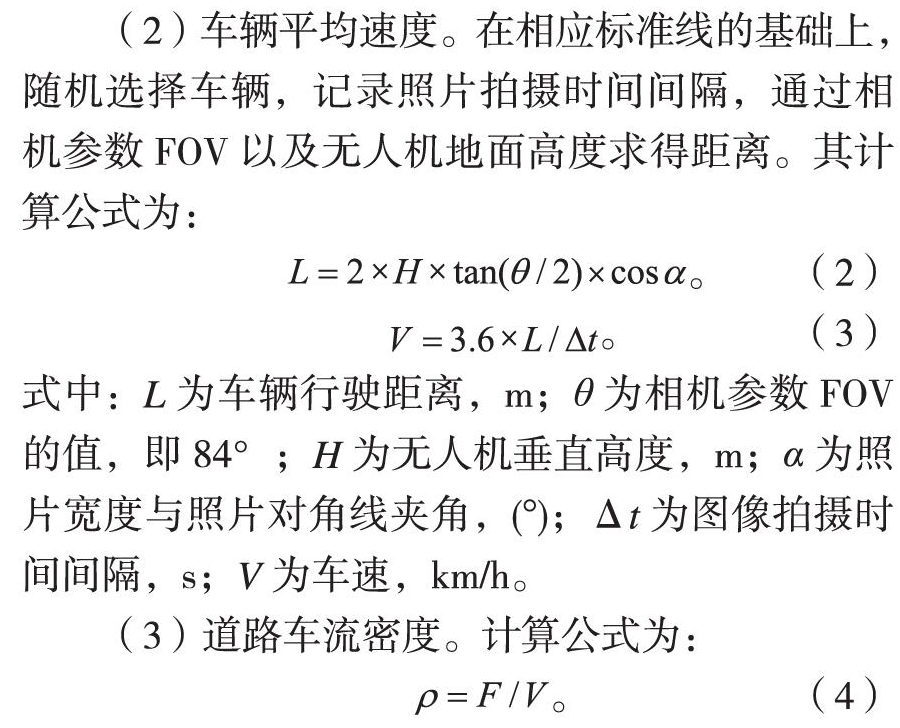
(2)车辆平均速度。在相应标准线的基础上,随机选择车辆,记录照片拍摄时间间隔,通过相机参数FOV以及无人机地面高度求得距离。其计算公式为:
式中:L为车辆行驶距离,m;θ为相机参数FOV的值,即84°;H为无人机垂直高度,m;α为照片宽度与照片对角线夹角,(°);Δt为图像拍摄时间间隔,s;V为车速,km/h。
(3)道路车流密度。计算公式为:
经上述计算,即可求得各调查点的交通流参数。以文昌街林大体育馆沿线、延兴路与林兴路交叉口为例,其调查和计算的结果见表1。由表1可知,与人工调查法相比,本方法对交通流参数的调查与识别准确率总体可达95%以上,对车流量的识别精度较高,总体达97.1%,最大误差不超过13%;对平均速度的识别精度总体达96.0%,最大误差不超过15%;对车流密度的计算精度总体为95.1%。对比不同高度的调查结果可知,调查高度越低,其调查结果的准确率相对越高,这主要是因为调查高度越低,航拍图像清晰度越高,其计算结果更为精确,因此,在未来实际应用过程中,应尽量选取较低的调查高度,以充分保证调查结果的准确性。
4 结论
本文针对城市道路提出了一种交通流参数调查与识别方法。该方法具有图像处理快捷和准确的特点,在二值化处理与车辆的特征点识别中参考了最新的研究成果,使车辆轮廓更加精准,为后续操作提供了便捷。此外,本文在利用识别车道分离车辆的算法中进行了创新性的思考,使该方法在处理速度和识别精度上有了更加明显的优势。目前,本方法尚未在极端环境以及突发情况(例如有运输车辆的货车经过)下进行调试,后续研究将在本文基础上做进一步探索和论证。
【参 考 文 献】
[1]曹蒙蒙. 基于图像内容的交通车辆识别关键技术[D]. 北京:华北电力大学,2015.
CAO M M. Key technologies of transportation vehicle recognition based on image content[D]. Beijing: North China Electric Power University, 2015.
[2]张汝华,杨晓光,储浩. 信号采样理论在交通流检测点布设中的应用[J]. 中国公路学报,2007,20(6):105-110.
ZHANG R H, YANG X G, CHU H. Application of signal sampling theory on traffic flow detector layout[J]. China Journal of Highway and Transport, 2007, 20(6):105-110.
[3]馬国旗. 城市道路交通流特征参数研究[D]. 北京:北京工业大学,2004.
MA G Q. Research on the technology of urban traffic flow characteristic parameters[D]. Beijing: Beijing University of Technology, 2004.
[4]曹廷,姚东成. 快速路匝道与主线合流区交通参数关系模型[J]. 交通运输研究,2017,3(5):20-25.
CAO T, YAO D C. Relationship model of traffic parameters between expressway and mainline junction[J]. Transport Research, 2017, 3(5):20-25.
[5]崔水兵. 城市动态路径诱导系统框架的研究[D]. 上海:上海交通大学,2005.
CUI S B. Study on dynamic route guidance systems[D]. Shanghai: Shanghai Jiao Tong University, 2005.
[6]毕湘利,魏秀琨,朱宏, 等.城轨交通基础设施全息化移动检测及主动维保系统[J]. 中国铁路,2014,(11):83-87.
BI X L, WEI X K, ZHU H, et al. Holographic movement detection and initiative maintenance system for urban rail transit infrastructure[J]. Chinese Railways, 2014(11):83-87.
[7]SALVO G, CARUSO L, SCORDO A. Urban traffic analysis through an UAV[J]. Procedia-Social and Behavioral Sciences, 2014, 111: 1083-1091.
[8]FERMAN M A, BLUMENFELD D E, DAI X. An analytical evaluation of a real-time traffic information system using probe vehicles[J]. Journal of Intelligent Transportation Systems, 2005, 9(1):23-24.
[9]ZHU Y, GAO N, WANG J, et al. Study on traffic flow patterns identification of single intersection intelligent signal control[J]. Procedia Engineering, 2016, 137:452-460.
[10]代雷,吴迪,张健. 基于OpenCV视觉库的ESPI图像增强技术研究[J]. 电子测量与仪器学报,2013,27(10):975-979.
DAI L, WU D, ZHANG J. Study on ESPI image enhancement technology based on OpenCV[J]. Journal of Electronic Measurement and Instrument, 2013, 27(10):975-979.
[11]冯云鹏,张娜,马融. 使用OpenCV技术实现的交通检测系统[J]. 计算机系统应用,2011,20(5):105-108.
FENG Y P, ZHANG N, MA R. Traffic detection system based on OpenCV technology[J]. Computer Systems and Applications, 2011, 20(5):105-108.
[12]TSANAKAS J A, CHRYSOSTOMOU D, BOTSARIS P N, et al. Fault diagnosis of photovoltaic modules through image processing and canny edge detection on field thermographic measurements[J]. International Journal of Sustainable Energy, 2015, 34(6):351-372.
[13]赵浩杰,金德智,李彦杰. 基于OpenCV的彩色目标识别[J]. 中国科技信息,2016(2):36-37.
ZHAO H J, JIN D Z, LI Y J. Color target recognition based on OpenCV[J]. China Science and Technology Information, 2016 (2):36-37.
[14]王应彪,贾贺鹏,李明, 等.基于OpenCV算法的玉米种子品质检测分级方法研究[J].林业机械与木工设备,2017,45(5):35-39.
WANG Y B, JIA H P, LI M, et al. Research on classification method of corn seed quality based on OpenCV algorithm[J].Forestry Machinery & Woodworking Equipment,2017,45(5):35-39.
[15]姜會亮,郭振民,胡学龙. 数字图像处理中几种平滑技术的研究比较[J]. 现代电子技术,2004,27(8):80-81.
JIANG H L, GUO Z M, HU X L. Research and comparison of some techniques of smoothing in digital image processing[J]. Modern Electronics Technique, 2004, 27(8): 80-81.
[16]段红燕,邵豪,张淑珍, 等. 一种基于Canny算子的图像边缘检测改进算法[J]. 上海交通大学学报,2016,50(12): 1861-1865.
DUAN H Y, SHAO H, ZHANG S Z, et al. An improved algorithm for image edge detection based on canny operator[J]. Journal of Shanghai Jiaotong University, 2016, 50(12):1861-1865.
[17]FURUKAWA Y, PONCE J. Carved visual hulls for image-based modeling[J]. International Journal of Computer Vision, 2009, 81(1): 53-67.
[18]王小俊,刘旭敏,关永. 基于改进Canny算子的图像边缘检测算法[J]. 计算机工程,2012,38(14):196-198.
WANG X J, LIU X M, GUAN Y. Image edge detection algorithm based on improved canny operator[J]. Computer Engineering, 2012, 38(14):196-198.
[19]申俊琦,胡繩荪,冯胜强. 激光视觉焊缝跟踪中图像二值化处理[J]. 天津大学学报,2011,44(4):308-312.
SHEN J Q, HU S S, FENG S Q. Image binarization processing in laser vision seam tracking[J]. Journal of Tianjin University, 2011, 44(4):308-312.
[20]任晓娜. 基于Otsu算法的图像阀值自动选取算法研究与应用[J]. 电子设计工程,2015,23(11):75-77.
REN X N. Research and application for image automatic threshold selection algorithm based on otsu algorithm[J]. Electronic Design Engineering, 2015, 23(11):75-77.
[21]刘翔. 多阈值OTSU快速算法的研究[D]. 长春:吉林大学,2017.
LIU X. Research on fast algorithm of multi-threshold OTSU[D]. Changchun: Jilin University, 2017.
[22]魏玉业,黄健柏,朱建军. 平面不规则曲线特征点的提取[J]. 测绘科学,2009,34(3):97-98.
WEI Y Y, HUANG J B, ZHU J J. The occlusion compensation in the true orthophoto generation[J]. Science of Surveying and Mapping, 2009, 34(3):97-98.
[23]徐美华,张凯欣,蒋周龙. 一种实时车道线偏离预警系统算法设计和实现[J]. 交通运输工程学报,2016,16(3): 149-158.
XU M H, ZHANG K X, JIANG Z L. Algorithm design and implementation for a real-time lane departure pre-warning system[J]. Journal of Traffic and Transportation Engineering, 2016, 16(3):149-158.
[24]李硕,汪猛.基于换道起点和终点混合搜索算法的轨迹与行为特征研究[J].公路工程,2017,42(6):116-121.
LI S, WANG M. Research on trajectory and behavior characteristics of hybrid search algorithm based on start and end points of lane change[J].Highway Engineering,2017,42(6):116-121.
[25]王传钦,曹江涛,姬晓飞. 基于视频分析技术的车距测量及预警系统设计[J]. 计算机技术与发展,2016,26(9): 87-90.
WANG C Q, CAO J T, JI X F. Design of a vehicle distance measurement and early warning system based on video analysis techniques[J]. Computer Technology and Development, 2016, 26(9):87-90.
[26]巴兴强,王梅,陈长茂. 冰雪条件下城市道路交叉口交通流特性研究[J]. 森林工程,2012,28(6):83-87.
BA X Q, WANG M, CHEN C M. Traffic flow characteristics of urban road intersections under ice and snow conditions[J]. Forest Engineering, 2012, 28(6):83-87.
