基于空间信息技术的路隧病害一体化监测车的原理分析
齐英杰 杜祥哲 方彦 白璐
摘要:
基于空间信息技术的路隧病害一体化监测车是通过整合空间技术、公路、病害一体化监测技术发展而来的新型特种车辆,具有路网病害可视化,监测高效化,数据传输及时准确化等功能。本文总结了现有的3种一体化监测技术,分析我国多功能监测车的使用现状,并通过实际检监测数据详解一体化监测车的工作原理,认为相对于传统检测技术,现有的基于空间技术的路隧病害一体化监测车在硬件和软件方面均具有明显优势,本文为早日研发在各级公路的监测工作实现更先进的监测手段提供参考。
关键词:
病害养护;多功能监测车;监测车特性
中图分类号:U 415.54;U 495文献标识码:A文章编号:1001-005X(2018)01-0080-05
Abstract:
The highway tunnel disease integrated testing vehicles based on spatial information technology is a new type of special vehicle developed through integration of space,road and disease monitoring technology,and has the functions of road network disease visualization,monitoring efficiency,data transmission timely and accurately.This paper summarizes the existing three kinds of integrated monitoring technologies,analyzes the application status of multifunction monitoring vehicles in China,and explains the principle of integrated monitoring vehicle through actual monitoring data.Compared with the traditional detection technology,the highway tunnel disease integrated testing vehicle has obvious advantages in both hardware and software.This article provides more advanced monitoring methods for early research and development of monitoring at all levels of roads.
Keywords:
Disease conservation;multifunction testing vehicles;detecting vehicle characteristics
0引言
隨着我国交通运输的快速发展,公路、隧道等基础设施逐步完善,但是公路、隧道建成通车后,受自然力的侵蚀和风化、车轮的磨损和冲击以及自身的材料老化等因素的影响,使用质量会逐渐降低。如不及时消除公路、隧道运行中的安全隐患,势必造成经济和人员的巨大损失。所以,公路、隧道在通车以后需采取病害养护,及时修复损害的地方,以提高公路、隧道的通行能力和服务水平[1]。美国、加拿大、日本等早在20世纪80年代就研制出了适合本国路况的公路监测车。瑞典的PAVUE系统和美国的PCES系统,是当时最先进的系统。进入21世纪,加拿大的路维(Roadware)公司研制出了具有自主知识产权的ARAN公路路面病害检测车,中国的浙江省和江苏省等经济发达的地区相继引进了这款检测车,取得了良好的效果[2]。我国在这一方面的研究也取得重大进展,北京理工大学、交通部公路科学研究院等单位研制出的路面智能检测车技术水平也已达到或接近国外水平[3]。吸收现有国内外先进系统的优点,开辟更新型道路监测系统是我国道路检测设备的研究目标。
1监测设备技术
1.1公路、隧道病害一体化监测技术
主流的车载监测技术主要有CCD相机技术的二维自动化隧道检测车技术、空间信息技术的自动化监测技术、多源数据可视化分析技术等,多种检测设备技术的使用使得公路隧道的监测取得突破性进展。
(1)基于CCD相机技术的二维自动化隧道检测车技术
二维自动化隧道检测车主要使用CCD相机为主要核心部件,搭配强光源和距离传感器、速度传感器、数字处理器进行数据实时传输和分析存储。将拍摄到的二维图像变成电子信号,然后通过A/D信号转换,变为计算机识别的数字图像信息进行存储。通过数据分析软件,自动识别隧道、路面缺陷后对每一处缺陷自动给出参考解决方案[4]。
(2)基于空间信息技术的自动化监测技术
随着高分辨率遥感卫星技术的发展,遥感卫星图像质量逐步提升,拥有不同遥感波段的高分辨率观测能力。经过多年的实践与研究,已经建立了交通遥感应用系统,并为公路维护和管理提供了科学依据,利用遥感数据开展了遥感应用取得了很好的效果[5]。
(3)多源数据可视化分析技术
借助于高仿真三维场景、完善的公路、隧道数据库(包括勘测数据、设计参数、竣工资料等数据信息)和GIS强大的空间信息管理和分析处理能力,以三维图形、二维图表等相结合和互动的方式展示分析结果,协助管理者预测公路技术状况的发展趋势。基于多源数据库的可视化分析技术是大数据时代实现形式之一。
随着检测技术的发展,地理信息系统(GIS)、路面构造深度及雷达系统已经逐步在发展应用之中,使得检测车的功能更为全面,将逐步成为公路、隧道检测的方式。
现阶段公路病害自动检测技术基本上都已进入实际应用阶段。如加拿大的路维公司开发一套路面裂缝自动评价系统,该系统核心软件包已经在全球十几个国家和地区广泛使用[6]。
随着城市化进程的快速发展,道路、地铁以及各类管线等工程不断修建,各种病害及安全事故不断发生,这对公路隧道的预防养护带来新的问题,所以利用新的科学技术手段采取全新的检测方法对其进行检测预防,是未来病害养护的发展趋势[7]。
1.2一体化多功能监测车优越性
一体化多功能监测车至今已经完成对杭州湾跨海大桥、甬金、杭千等公路、隧道的监测任务,累计监测长度达到1 000 km,它为高速公路的病害养护工作提供了精确的科学依据。
现以某高速公路检测结果分析,该高速公路路面检测长度共614.2 km,检测包括路面损坏、路面行驶质量、路面车辙、路面抗滑性能。
在检测中利用智能道路检测车,该检测车集成了路面破损检测系统、车辙检测系统、平整度检测系统、路基病害检测系统,可以完成图像分类、破损识别、车辙分析、路面变形分析、平整度分析、路况信息录入、道路结构内部缺陷分析、对采集的数据进行快速、准确智能化的分析处理[8]。其检测分析见表1~表4。
结果分析:
路面损坏状况与路面行驶质量较好,日常养护为主,并对局部破损小修,对评价为中的路段可以进行罩面等措施。
路面车辙与路面抗滑性能较好,也是以养护为主,对良、中进行小修,次、差的路段,以微表处理的方式进行修整。
通过以上实例可以得知与传统检测方式相比,多功能检测车优越性明显:
(1)利用二维自动化隧道检测车技术直接得到公路隧道的平整损害的相关数据,数据及时准确,成本较低。
(2)检测范围广,速度快,以空间立体化进行监测。监测车在行驶的过程中即可对公路隧道进行检测。同时利用拍照的方式对公路隧道进行信息的获取,不会对路面造成损害。
(3)信息具有可重复性,在ARAN中采集数据可重复性很好,激光平整测试仪的最大平均偏差为3.6%,最大偏差为8.0%,激光车辙仪最大平均偏差10.7%,最大偏差16.2%,激光纹理测试仪最大偏差4.9%,最大平均偏差8.8%。能够及时校对检测的数据,并可对信息进行存储为日后养护提供参考。
但对于多功能一体化监测车来说,也存在一些缺陷,在自动识别裂缝软件中,由本身的局限性,在识别过程中仅识别裂缝的长度和宽度而不能检测先行规范要求的裂缝的面积,因此还需要通过人为的进行识别,另一方面其产生的检测的数据不能自动计算输出结果,检测数据相对零散不能够与管理系统数据进行对接,须有人工参与,同时多功能检测车对于弯沉、摩擦系数以及路面厚度的检测还存在相应的问题[9]。
2基于空间技术的路隧病害一体化多功能监测车构成原理
2.1多功能监测车构成
作为道路质检部门验收检测公路、隧道的检测仪器,多功能监测车可以在不收回臂架的情况下慢速行驶,对公路隧道进行全面监测,为道路养护部门提供基础检测数据与技术方案。它具有效率高、安全性好、适应性强、功率消耗低等优点[10~13]。部分检测车设备各部件分布如图1所示。
多功能公路、隧道监测车是一套模块化的数据采集平台,由一辆特别改装的汽车底盘和各种數据采集子系统组成[14],一般包括纵向断面测量系统、激光扫描横断面系统、定位定向系统、道路全景摄像系统、全自动裂缝探测系统、全球定位GPS系统等,各个系统特定功能保证了监测车能够及时有效的对公路、隧道进行监测。检测车各系统功能如图2所示。
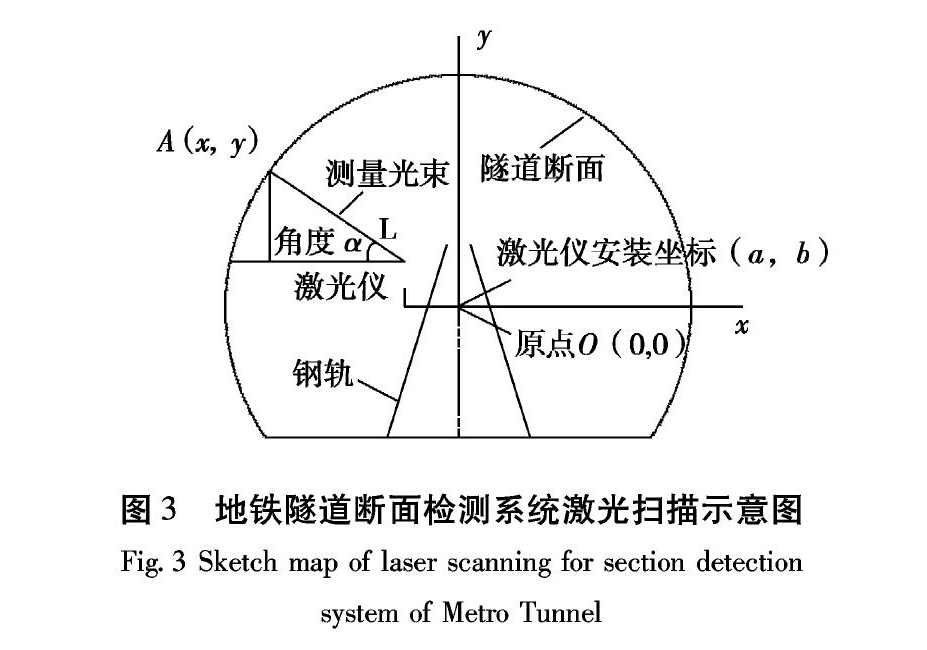
(1)纵向断面测量:比较断面设计标准判断监测点是否发生变化,扫描速度快、精度高,动态检测如图3所示。
对应点坐标:
x=-L·cosα+a。
y=L·sinα+b。
(2)激光扫描横断面:通过激光测距的方法对公路、隧道的横断面进行扫描:
t=Φ/ω=Φ/2πf。
D=(c/2)Φ/2πf。
Φ=ΔΦ(λ<2D时)。
Φ=ΔΦ+2nπ(λ≤2D时)。
D=(λ/2)(N+ΔΦ/2π)=Lx(n+ΔΦ/2π)
式中:f为激光源调制频率;D为调制光径的距离;t为激光发射与接收时间;ω为调制光的调制角频率,ω=2πf;n为波动的数目;Lx为度量长度的单位长度;Lx=λ/2;c为空气中的光速。
监测车行进的过程中,由于自身因素会产生振动,这种振动会对隧道断面的检测产生影响,所以在后期的数据处理中对其进行修正。
(3)全景摄像系统:通过摄像系统进行连续路表图像的采集,通过后期处理软件自动处理与人工判读相结合,分类统计各种公路隧道的病害,可以避免人工检测带来的危险性。
(4)自动裂缝探测系统:利用现代电子成像技术,把公路、隧道表面裂缝信息实时显示在屏幕上;分辨率可达0.002 5 mm,保证微细裂缝的判读精确性。它具有独特的自校准功能,可用标准刻度板进行校准。强大的文件管理功能可按构建名称进行管理,便于日后查询。同时它可以对裂缝进行更深入的分析,并生成检测报告。
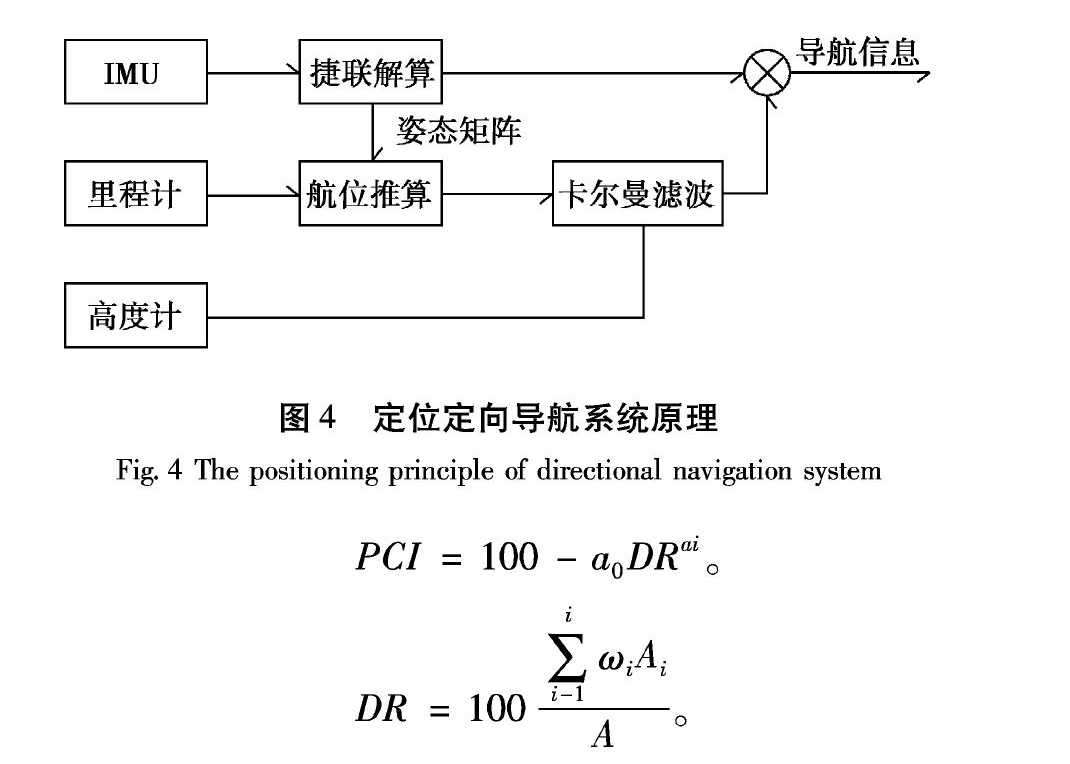
(5)车载定位定向系统:在定向定位系统中包括IMU、里程计、高度计、导航计算机等硬件组成,还包含捷联惯导算法、航位推算算法、误差补偿算法等软件组成部分,惯导导航系统与里程计具有互补的特性,它们的组合可以抑制由于惯导系统误差随时间的发散问题,高度计准确确定车辆高度定位信息[11],组成原理如图4所示。
(6)GPS作为先进的无线导航系统定位准确,范围广、及时有效对检测点定位。
2.2多功能监测车监测原理
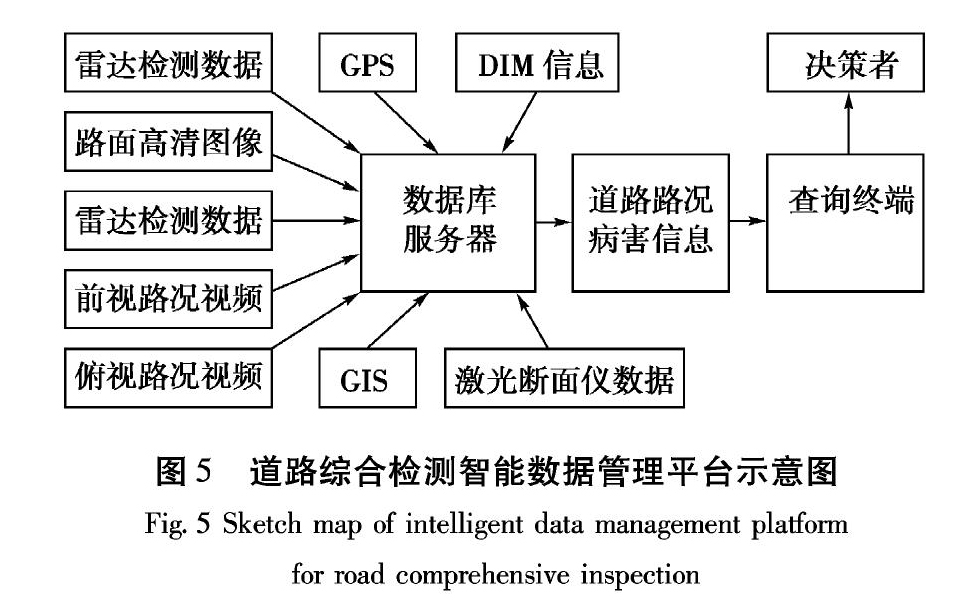
在众多的检测指标中,路面损坏指数PCI是对道路隧道各种损坏的类型、范围以及严重状况的指标,路面行驶质量指数RQI反映路面的平整状况,纹理车辙则是排水与抗滑的性能标准。监测车不但检测各种项目指标外,还对其所搜集的数据进行分析研究,通过对公路隧道的检测信息进行拍照录像,并进行信息数据的统计。同时利用智能数据管理平台对检测路段与隧道进行病害的分级与分类[14~16]。
式中:DR为路面损坏率。其中PCI数值范围为0~100。
(1)在监测过程中,利用高速摄像机对公路、隧道进行连续拍摄,这种相机搭配的同步的强光源会消除公路隧道中存在的阴影,拍摄到二维影像会转换成数字图像进行存储。
(2)通过智能数据管理平台中先进的图像识别系统对图像进行开放结构的程序离线处理,并对公路、隧道病害生成报告,展示病害的类型、位置及严重程度。公路、隧道管理人员通过对输出的监测信息进行合理的判断并及时做出病害养护方案,由于通过计算机软件获得的第一手信息保证了公路、隧道评估的准确性。
采集到的原始数据在检测车上仅生成特殊文件并不对数据进行输出与更改,这样保证了原始数据的准确可靠性,数据利用硬盘拷贝到数据管理中心,并利用专门的处理软件对数据进行分析研究,在此过程中数据不存在遗失的状况。
在最新的公路、隧道的检测中,道路综合检测智能数据管理平台是综合各种最新技术并最终对数据进行处理生成报告交于决策人员。如图5所示。
2.3多功能监测车特性
多功能监测车本身固有的优越性,包含硬件与软件方面的特性。
从硬件方面来说,监测车具有速度快,检测效率高的特点,由于测量仪器安装在与车身固结为一体的构架上保证了良好的振动性能。监测车的车身动态特性极大影响检测数据的精确性,为了保证精确的测得限界尺寸,对于检测车本身来说,强度性能和制震性能必须满足相应的工作条件[17]。
从监测车的软件特性来说,多功能监测车的基础设施采集工具具有一体化、模块化与多测量的特点[18-19]。它的子系统能够详尽采集道路隧道的性能数据,这为交管部门提供准确及时的数据,这些数据能够与商用GIS程序兼容,高效率归并到如PC机、UNIX等管理系统中。由于模块化的特性,使得现存的采集系统与日后开发研制的新技术完全兼容。
3结论
通过对比基于空间技术的路隧病害一体化多功能监测车和传统的车载监测装置,基于空间信息技术的路隧病害一体化监测车优势明显,PCI评价系统和其搭载的定位、全景摄像系统、数据存储和计算能力使其精度和全方位监测功能远远领先靠人力目视监测。然而,笔者认为,目前的多功能检测车只能通过一次次机械的监测施工,缺乏连续的监测记录和可视化、情景化的病害显示手段,而且不能过多地显示地形地貌的沉降和预警。对于整个公路隧道一体化监测而言,只将目光局限于通过研发多功能一体化监测终端是远远不够的,必须把强化全面的路面与隧道的预测预防;建立全面的道路隧道管理系统;收集全线道路路面的技术数据;建立健全公路、隧道性能状况管理大数据作为主要针对点,结合北斗系统和可视化地图模型手段,为下一步更先进的检测手段做好前瞻性的技术储备和铺垫。
【参考文献】
[1]张华,王海龙.机械化在公路养护作业系统中的应用[J].黑龙江科技信息,2011(7):282.
[2]胡忠林,齐英杰,白璐.国外公路路面、隧道检测车发展概况[J].林业机械与木工设备,2016,44(5):4-7.
[3]聂永红,许平.隧道检测车的动力性能分析[J].铁道机车车辆,2000(1):25.
[4]Lee B Y,Kim Y Y,Yi S T,et al.Automated image processing technique for detecting and analysing concrete surface cracks[J].Structure and Infrastructure Engineering,2013,9(6):567-577.
[5]Barnea D I,Silvermn H F.A class of algorithms for fast digital image registration[J].IEEE Computer Society,1972,21(2):179-186.
[6]嚴路.表面缺陷检测中姿态自动化调整及图像校准技术研究[D].杭州:浙江大学,2015.
[7]宋晨曦,邹同元,王剑,等.高分遥感技术在交通运输行业的应用及展望[J].卫星应用,2014(6):55.
[8]李国燕.基于图像的路面破损识别[D].石家庄:河北工业大学,2009.
[9]Liu D,Wang S,Cao P,et al.Darkfield microscopic image stitching method for surface defects evaluation of large fine optics[J].Optics Express,2013,21(5):5974-5987.
[10]朱佳.先进检测技术助力大连市政道路精细化养护——中电22所LTD-60道路综合检测雷达系统应用介绍[J].市政技术,2013(3):2.
[11]青岛市高速公路管理处.高速公路路面检测[EB/OL].http://www.docin.com/p-219805476.htm.
[12]严咏梅,汤建林,高胜萍,等.多功能检测车在公路路面技术状况检测中的应用[J].交通科技,2009(S1):79.
[13]黄海峰.多轴飞行器在公路桥梁检测中应用展望[A].中国公路学会养护与管理分会.2013年全国公路养护技术学术年会论文集桥隧卷[C].中国公路学会养护与管理分会,2014:3.
[14]曾江洪,许佳.高速公路沥青路面破损状况评价指标体系研究[J].公路工程,2009,34(3):120-122.
[15]严恭敏.车载自主定位定向系统研究[D].西安:西北工业大学,2006.
[16]聂永红,许平.隧道检测车的动力性能分析[J].铁道机车车辆,2000(1):25-27.
[17]刘冲.基于三维重构的路面凹坑检测技术研究[D].重庆:重庆交通大学,2013.
[18]方伟俊.公路沥青路面预防性养护措施决策研究[D].大连:大连理工大学,2008.
[19]肖玉辉,段劲,胡静轩,等.平接缝预制块拱形骨架护坡应力位移监测研究[J].公路工程,2017,42(1):170-173.
