激励中含有谐波成分时的工况模态参数辨识
于亮亮 宋汉文


摘要:在实际工程中,工况模态分析(operational modal analysis,OMA)方法得到了广泛应用。当激励中含有谐波并且谐波频率靠近系统固有频率时,可以通过添加极点来修改传统OMA算法以提高模态辨识精度。基于自然激励技术(natural excitation technique),推导了添加极点的理论依据。当系统所受的激励中含有谐波成分时,将其响应的相关函数表示为系统受白噪声激励时响应的相关函数与一系列谐波的叠加。基于传统OMA方法进行模态参数辨识时,谐波不会改变原来系统极点的数学表达,但是当谐波频率靠近系统固有频率时会影响OMA算法对系统固有极点的拟合准确性。在谐波频率已知时,通过添加谐波造成的极点,可以有效提高OMA算法对系统固有频率和阻尼比的辨识精度。通过仿真和实验,进一步验证了所提出的理论。
关键词:结构振动;参数识别;工况模态分析;环境激励;最小特征系统实现算法
中图分类号:O327;O321 文献标志码:A 文章编号:1004-4523(2018)01-0074-08
DOI:10.16385/j.cnki.issn.1004-4523.2018.01.009
引言
工况模态分析技术(operational modal analy-sis,OMA)是一类只基于系统工作时或受环境激励时的响应信号而进行系统模态参数辨识的方法。由于系统所受的激励不可测量,通常假设为白噪声。它的发展可以追溯到1965年,Clarkson和Mere-er提出使用互相关函数估计承受白噪声激励下结构的频率响应函数,这也是在激励未知的情况下,使用相关函数替代脉冲响应函数的思想起源。经过40多年的发展,OMA日趋成熟,并已经拓宽到了应用更为广泛的工程领域。
白噪声是一种理想假设,而激励中含有简谐成分的情况,在旋转机械系统中很常见。例如风机、汽车、船舶等,由于旋转部件偏心质量的存在,在受到的环境激励中,往往叠加有简谐成分。为防止出现虚假结构模态,最初人们只是简单地通过“陷波器(Notch Filter)”或者带阻滤波器的方法将响应中的简谐成分滤除_3],然而,滤波会导致系统响应信号的相位信息的丢失,并且在实际应用中,滤波通常会“污染”测量得到的数据,改变系统的极点。Brinck-er给“谐波模态”作了定义,并且根据简谐波与随机数的概率密度函数(probability density function)的形状不一样,定义了一个谐波指示函数,通过频域分解技术(frequency domain decomposition,FDD)来去除谐波影响。Jacobsen在Brincker的基础上,先判断出諧波的频率,基于单自由度系统,在响应的功率谱密度函数上,通过线性插值法将由谐波引起的峰直接移除。Devriendt将传递函数引入到谐波辨识模型中,通过两次不同位置的实验,分别求传递函数来消除谐波的影响以辨识系统模态参数。Agneni用概率密度法检测出谐波模态,并与峭度法进行了对比,用Hilbert变换的方法构造出“频响函数”并识别出谐波模态参数,然后重构谐波模态的“频响函数”,再与原“频响函数”相减以去除谐波模态的影响。Araujo和Laier对不同参考点组成的功率谱密度传递矩阵进行了奇异值分解,在环境激励为有色噪声的情况下辨识了系统的固有频率和模态振型。这一方法不依赖于激励的形式,也就不要求激励必须满足白噪声的假设。对于谐波频率接近固有频率的情形,滤波方法或者插值方法会对系统固有频率的辨识产生很大的影响。Mohanty在谐波频率已知的前提下,通过往传统OMA辨识算法中添加极点的方式,修改了Ibrahim time do-main technique(ITD),least squares complex ex-ponential method(LSCE),single station timedomain(SSTD),eigensystem realization algo-rithm(ERA)等算法,以辨识系统的模态参数。chomette将修改的LSCE算法运用在竖琴的模态参数辨识中,验证了该算法的有效性。基于Mo-hanty的思路,董霄峰通过修改SSI算法,来辨识系统的模态参数,并将这一方法运用在陆上风机结构的模态测试中,取得了良好效果。
文献均是通过往现有算法中添加极点的方式来修改已有算法,但没有给出添加极点的理论依据。本文在上述工作基础上,并基于自然激励技术,从相关函数出发,论证了添加极点的理论依据。首先推导了自然激励技术在复模态系统中的推广形式,然后推导出激励中含有谐波成分时响应的相关函数表达式,证明了激励中谐波成分不会影响辨识算法中系统极点的数学表达,给出了往现有算法中添加极点的依据。最后通过仿真及实验进一步证实了本文结论。
1基本原理
1.1系统受白噪声及谐波的共同激励
N(N≥1)自由度线性定常系统强迫振动方程用矩阵形式表示为
式(12)等号右边的第一项与脉冲响应函数进行比较,有着相似的对应形式,其中包含了振动系统模态频率、阻尼比和模态向量等信息,用其替换脉冲响应函数代人到传统实验模态分析方法中,可以辨识出系统的模态参数。而式(12)等号右边的第二项则为与激励谐波同频率的谐波,在利用传统ERA方法对Rij(T)进行曲线拟合时,将会得到L个阻尼为零的极点。
进一步,当wk靠近系统的固有频率时,正弦成分的影响会导致系统的固有极点不能够很好地通过曲线拟合辨识出来。因此在曲线拟合之前通过修改ERA算法,将谐波成分的极点信息先写入到ERA算法中。
1.2修改的ERA算法
式(1)描述的系统可由下列状态方程表示
(13)式中z(k)为tk=k△t时刻系统的状态向量;△t为采样间隔;x(k)是在k△t时刻的实测响应向量;f(k)是在kAt时刻系统的输入向量;A为系统矩阵;B为输入矩阵;C为输出矩阵。
在OMA中,脉冲响应函数也可以由相关函数来代替。因此,自由响应的最小实现问题常用相关函数的最小实现问题来代替。
为辨识系统矩阵A,首先构造Hankel矩阵,
由式(14),分别令k=0,k=1可得H(0)和H(1)。對于线性定常系统,H(0)与A,JB及c之间存在如下关系
由式(15)及式(16)可以得到系统矩阵A的最小实现形式Ar,进而可以辨识系统的模态频率、阻尼比和振型。
图2所示响应的相关函数中包含了不衰减的谐波成分,进一步考察发现,谐波频率与激励中谐波频率相同。这验证了式(12)将相关函数写成两部分的合理性。
运用传统ERA方法辨识系统的模态参数,其稳态图如图3(a)所示。
传统ERA在辨识第3阶模态参数时,由于谐波的频率离系统的固有频率很近,导致算法不能够稳定地拟合出系统的极点。其辨识的第3阶频率及阻尼比如表1所示。
通过表1,对比辨识值与给定值,频率明显偏小,阻尼也有一定的误差。
运用修改过的ERA方法辨识系统的模态参数,稳态图如图3(b)所示。通过添加谐波成分形成的极点,曲线拟合的过程中可以快速稳定地找到系统固有频率处的极点。其辨识的第3阶频率及阻尼比如表2所示。
通过表2,对比辨识值与给定值,频率与给定值相差不大,阻尼也与给定值之间误差很小。
对比图3(a)和图3(b),修改的ERA算法可以很好地拟合出系统的固有极点,而不受谐波成分的影响。对比表1和表2,通过添加谐波引起的极点,可以比传统算法更快速准确地辨识出系统的固有频率和阻尼比。
3实验研究
为了验证本文的理论,在实验室所能提供的技术支持的基础上,以一根钢制梁为对象进行了实验研究,如图4所示。
3.1受纯白噪声激励
3.2受白噪声及谐波共同激励
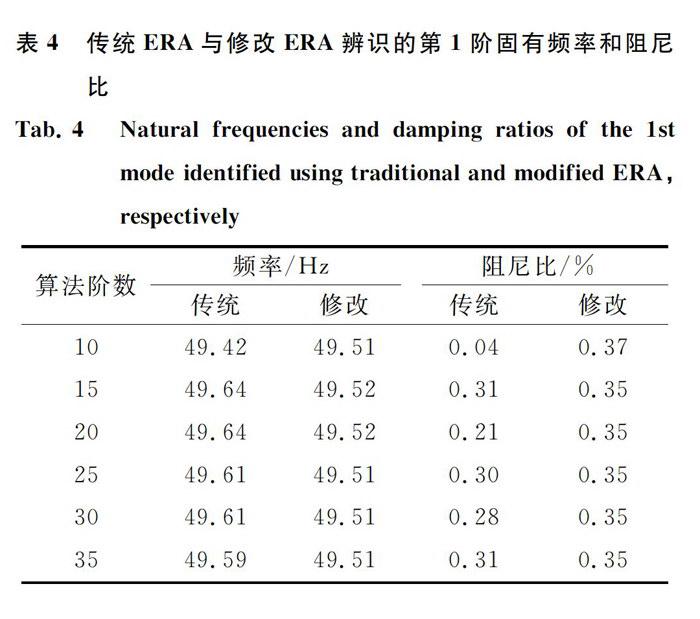
对比图5(a)与图5(b),通过添加谐波引起的极点,系统可以快速拟合出系统的固有极点。传统ERA及修改的ERA辨识的梁的固有频率及阻尼比如表4所示。
图5和表4表明,修改的ERA在辨识系统的固有频率与阻尼时比传统ERA更稳定更准确更快速。
4结论
基于NExT理论,从相关函数出发,本文推导了由添加极点来修改传统OMA算法的理论依据。结论如下:
1)当系统的激励中含有谐波成分时,推导出响应的相关函数,并将其表示为系统受白噪声激励时响应的相关函数与一系列谐波的叠加。
2)当激励中含有谐波成分时,证明了基于传统ERA方法进行模态参数辨识,谐波不会改变原来系统极点的数学表达,但是当谐波频率靠近系统固有频率时会影响ERA算法对系统固有极点的拟合准确性。
3)事先测试出谐波频率,通过往传统ERA算法中添加谐波引起的极点,提高了ERA算法对系统固有频率和阻尼比的辨识精度。
文中提出的方法不仅适用于文中提到的算例和实验,也适应用于其他的工程实际应用。
摘要:在实际工程中,工况模态分析(operational modal analysis,OMA)方法得到了广泛应用。当激励中含有谐波并且谐波频率靠近系统固有频率时,可以通过添加极点来修改传统OMA算法以提高模态辨识精度。基于自然激励技术(natural excitation technique),推导了添加极点的理论依据。当系统所受的激励中含有谐波成分时,将其响应的相关函数表示为系统受白噪声激励时响应的相关函数与一系列谐波的叠加。基于传统OMA方法进行模态参数辨识时,谐波不会改变原来系统极点的数学表达,但是当谐波频率靠近系统固有频率时会影响OMA算法对系统固有极点的拟合准确性。在谐波频率已知时,通过添加谐波造成的极点,可以有效提高OMA算法对系统固有频率和阻尼比的辨识精度。通过仿真和实验,进一步验证了所提出的理论。
关键词:结构振动;参数识别;工况模态分析;环境激励;最小特征系统实现算法
中图分类号:O327;O321 文献标志码:A 文章编号:1004-4523(2018)01-0074-08
DOI:10.16385/j.cnki.issn.1004-4523.2018.01.009
引言
工况模态分析技术(operational modal analy-sis,OMA)是一类只基于系统工作时或受环境激励时的响应信号而进行系统模态参数辨识的方法。由于系统所受的激励不可测量,通常假设为白噪声。它的发展可以追溯到1965年,Clarkson和Mere-er提出使用互相关函数估计承受白噪声激励下结构的频率响应函数,这也是在激励未知的情况下,使用相关函数替代脉冲响应函数的思想起源。经过40多年的发展,OMA日趋成熟,并已经拓宽到了应用更为广泛的工程领域。
白噪声是一种理想假设,而激励中含有简谐成分的情况,在旋转机械系统中很常见。例如风机、汽车、船舶等,由于旋转部件偏心质量的存在,在受到的环境激励中,往往叠加有简谐成分。为防止出现虚假结构模态,最初人们只是简单地通过“陷波器(Notch Filter)”或者带阻滤波器的方法将响应中的简谐成分滤除_3],然而,滤波会导致系统响应信号的相位信息的丢失,并且在实际应用中,滤波通常会“污染”测量得到的数据,改变系统的极点。Brinck-er给“谐波模态”作了定义,并且根据简谐波与随机数的概率密度函数(probability density function)的形状不一样,定义了一个谐波指示函数,通过频域分解技术(frequency domain decomposition,FDD)来去除谐波影响。Jacobsen在Brincker的基础上,先判断出諧波的频率,基于单自由度系统,在响应的功率谱密度函数上,通过线性插值法将由谐波引起的峰直接移除。Devriendt将传递函数引入到谐波辨识模型中,通过两次不同位置的实验,分别求传递函数来消除谐波的影响以辨识系统模态参数。Agneni用概率密度法检测出谐波模态,并与峭度法进行了对比,用Hilbert变换的方法构造出“频响函数”并识别出谐波模态参数,然后重构谐波模态的“频响函数”,再与原“频响函数”相减以去除谐波模态的影响。Araujo和Laier对不同参考点组成的功率谱密度传递矩阵进行了奇异值分解,在环境激励为有色噪声的情况下辨识了系统的固有频率和模态振型。这一方法不依赖于激励的形式,也就不要求激励必须满足白噪声的假设。对于谐波频率接近固有频率的情形,滤波方法或者插值方法会对系统固有频率的辨识产生很大的影响。Mohanty在谐波频率已知的前提下,通过往传统OMA辨识算法中添加极点的方式,修改了Ibrahim time do-main technique(ITD),least squares complex ex-ponential method(LSCE),single station timedomain(SSTD),eigensystem realization algo-rithm(ERA)等算法,以辨识系统的模态参数。chomette将修改的LSCE算法运用在竖琴的模态参数辨识中,验证了该算法的有效性。基于Mo-hanty的思路,董霄峰通过修改SSI算法,来辨识系统的模态参数,并将这一方法运用在陆上风机结构的模态测试中,取得了良好效果。
文献均是通过往现有算法中添加极点的方式来修改已有算法,但没有给出添加极点的理论依据。本文在上述工作基础上,并基于自然激励技术,从相关函数出发,论证了添加极点的理论依据。首先推导了自然激励技术在复模态系统中的推广形式,然后推导出激励中含有谐波成分时响应的相关函数表达式,证明了激励中谐波成分不会影响辨识算法中系统极点的数学表达,给出了往现有算法中添加极点的依据。最后通过仿真及实验进一步证实了本文结论。
1基本原理
1.1系统受白噪声及谐波的共同激励
N(N≥1)自由度线性定常系统强迫振动方程用矩阵形式表示为
式(12)等号右边的第一项与脉冲响应函数进行比较,有着相似的对应形式,其中包含了振动系统模态频率、阻尼比和模态向量等信息,用其替换脉冲响应函数代人到传统实验模态分析方法中,可以辨识出系统的模态参数。而式(12)等号右边的第二项则为与激励谐波同频率的谐波,在利用传统ERA方法对Rij(T)进行曲线拟合时,将会得到L个阻尼为零的极点。
进一步,当wk靠近系统的固有频率时,正弦成分的影响会导致系统的固有极点不能够很好地通过曲线拟合辨识出来。因此在曲线拟合之前通过修改ERA算法,将谐波成分的极点信息先写入到ERA算法中。
1.2修改的ERA算法
式(1)描述的系统可由下列状态方程表示
(13)式中z(k)为tk=k△t时刻系统的状态向量;△t为采样间隔;x(k)是在k△t时刻的实测响应向量;f(k)是在kAt时刻系统的输入向量;A为系统矩阵;B为输入矩阵;C为输出矩阵。
在OMA中,脉冲响应函数也可以由相关函数来代替。因此,自由响应的最小实现问题常用相关函数的最小实现问题来代替。
为辨识系统矩阵A,首先构造Hankel矩阵,
由式(14),分别令k=0,k=1可得H(0)和H(1)。對于线性定常系统,H(0)与A,JB及c之间存在如下关系
由式(15)及式(16)可以得到系统矩阵A的最小实现形式Ar,进而可以辨识系统的模态频率、阻尼比和振型。
图2所示响应的相关函数中包含了不衰减的谐波成分,进一步考察发现,谐波频率与激励中谐波频率相同。这验证了式(12)将相关函数写成两部分的合理性。
运用传统ERA方法辨识系统的模态参数,其稳态图如图3(a)所示。
传统ERA在辨识第3阶模态参数时,由于谐波的频率离系统的固有频率很近,导致算法不能够稳定地拟合出系统的极点。其辨识的第3阶频率及阻尼比如表1所示。
通过表1,对比辨识值与给定值,频率明显偏小,阻尼也有一定的误差。
运用修改过的ERA方法辨识系统的模态参数,稳态图如图3(b)所示。通过添加谐波成分形成的极点,曲线拟合的过程中可以快速稳定地找到系统固有频率处的极点。其辨识的第3阶频率及阻尼比如表2所示。
通过表2,对比辨识值与给定值,频率与给定值相差不大,阻尼也与给定值之间误差很小。
对比图3(a)和图3(b),修改的ERA算法可以很好地拟合出系统的固有极点,而不受谐波成分的影响。对比表1和表2,通过添加谐波引起的极点,可以比传统算法更快速准确地辨识出系统的固有频率和阻尼比。
3实验研究
为了验证本文的理论,在实验室所能提供的技术支持的基础上,以一根钢制梁为对象进行了实验研究,如图4所示。
3.1受纯白噪声激励
3.2受白噪声及谐波共同激励
对比图5(a)与图5(b),通过添加谐波引起的极点,系统可以快速拟合出系统的固有极点。传统ERA及修改的ERA辨识的梁的固有频率及阻尼比如表4所示。
图5和表4表明,修改的ERA在辨识系统的固有频率与阻尼时比传统ERA更稳定更准确更快速。
4结论
基于NExT理论,从相关函数出发,本文推导了由添加极点来修改传统OMA算法的理论依据。结论如下:
1)当系统的激励中含有谐波成分时,推导出响应的相关函数,并将其表示为系统受白噪声激励时响应的相关函数与一系列谐波的叠加。
2)当激励中含有谐波成分时,证明了基于传统ERA方法进行模态参数辨识,谐波不会改变原来系统极点的数学表达,但是当谐波频率靠近系统固有频率时会影响ERA算法对系统固有极点的拟合准确性。
3)事先测试出谐波频率,通过往传统ERA算法中添加谐波引起的极点,提高了ERA算法对系统固有频率和阻尼比的辨识精度。
文中提出的方法不仅适用于文中提到的算例和实验,也适应用于其他的工程实际应用。
